1.本发明涉及变量控制技术领域,尤其涉及一种集群无人机再编队方法。
背景技术:
2.集群无人机再编队方法主要分四个步骤:编队生成、编队保持、编队切换和编队避障。编队生成是多无人机系统根据环境的限制、任务需求和摄像头获取的无人机数量来设计稳定的编队队形;编队保持是多无人机系统在整体运动中保持编队不变,或者在允许队形少量变化的条件下保持整个编队统一前进;编队避障是多无人机借助环境信息来避免与环境中的障碍物发生碰撞的同时,又保证不会与其他无人机发生碰撞。
3.采用上述方式,当摄像头在获取的目标无人机群时,如其他无人机群出现在摄像头的获取区域内时,会增加目标无人机群的背景复杂程度,从而对无人机编队效果造成干扰,降低了对集群无人机的再编队效果。
技术实现要素:
4.本发明的目的在于提供一种集群无人机再编队方法,旨在解决现有的集群无人机再编队方法的再编队效果较差的问题。
5.为实现上述目的,本发明提供了一种集群无人机再编队方法,包括以下步骤:
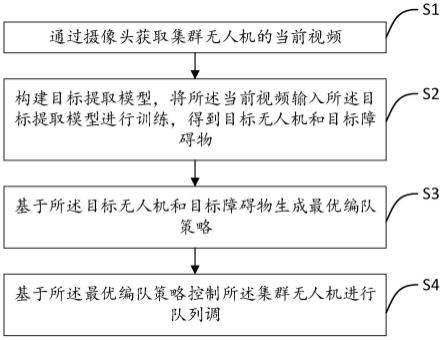
6.通过摄像头获取集群无人机的当前视频;
7.构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物;
8.基于所述目标无人机和目标障碍物生成最优编队策略;
9.基于所述最优编队策略控制所述集群无人机进行队列调整。
10.其中,所述构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的具体方式为:
11.获取集群无人机数据集;
12.构建网络模型;
13.使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型;
14.将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。
15.其中,所述使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型的具体方式为:
16.对所述集群无人机数据集中的无人机和障碍物进行标注,得到标注数据集;
17.将所述标注数据集划分为训练集和验证集;
18.使用所述训练集对所述网络模型进行训练,得到训练模型;
19.使用所述验证集对所述训练模型进行验证,验证通过,得到目标提取模型。
20.其中,所述训练集和所述验证集的比例为8:2。
21.其中,所述将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的具体方式为:
22.对所述当前视频进行过滤,得到过滤视频;
23.基于所述目标提取模型的输入尺寸对所述过滤视频进行尺寸调整,得到输入视频;
24.将所述输入视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。
25.其中,所述基于所述目标无人机和目标障碍物生成最优编队策略的具体方式为:
26.基于目标期望队形生成多个初步编队策略;
27.使用所述目标无人机和目标障碍物对每一所述初步编队策略进行模拟,得到最优编队策略。
28.本发明的一种集群无人机再编队方法,通过摄像头获取集群无人机的当前视频;构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物;基于所述目标无人机和目标障碍物生成最优编队策略;基于所述最优编队策略控制所述集群无人机进行队列调整,通过所述目标提取模型可增加对目标集群无人机提取的精确度,解决了现有的集群无人机再编队方法的再编队效果较差的问题。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.图1是本发明提供的一种集群无人机再编队方法的流程图。
31.图2是构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的流程图。
32.图3是使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型的流程图。
33.图4是将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的流程图。
34.图5是基于所述目标无人机和目标障碍物生成最优编队策略的流程图。
具体实施方式
35.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
36.请参阅图1至图5,本发明提供一种集群无人机再编队方法,包括以下步骤:
37.s1通过摄像头获取集群无人机的当前视频;
38.具体的,在步骤通过摄像头获取集群无人机的当前视频之前,所述方法还包括:
39.s101对摄像头进行清洁;
40.具体的,可通过清洁刷和清洁海绵对所述摄像头的拍摄端进行擦拭,同时通过吸尘器吸取被所述清洁刷和所述清洁海绵清洁下来的杂质,避免杂质会环境造成污染。
41.s102使用清洁后的摄像头拍摄任意空白画面,得到拍摄视频;
42.具体的,通过所述空白画面能更加精确的判断出所述摄像头的拍摄端是否残留有杂质。
43.s103对所述拍摄视频的清晰度是否合格进行判断,当所述拍摄视频清晰度合格,执行步骤s1,当所述拍摄视频清晰度不合格,返回步骤101。
44.s2构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物;
45.具体方式为:
46.s21获取集群无人机数据集;
47.具体的,可通过爬虫技术从网站上获取带有冗杂背景的无人机数据集。
48.s22构建网络模型;
49.s23使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型;
50.具体方式为:
51.s231对所述集群无人机数据集中的无人机和障碍物进行标注,得到标注数据集;
52.s232将所述标注数据集划分为训练集和验证集;
53.具体的,所述训练集和所述验证集的比例为8:2。
54.s233使用所述训练集对所述网络模型进行训练,得到训练模型;
55.s234使用所述验证集对所述训练模型进行验证,验证通过,得到目标提取模型。
56.具体的,验证不通过则对所述网络模型的参数进行调整之后重新进行训练,直至训练模型验证通过。
57.s24将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。
58.具体方式为:
59.s241对所述当前视频进行过滤,得到过滤视频;
60.具体的,提取所述当前视频的图像帧,得到多帧图像;按照所述当前视频的序列对每一帧图像进行过滤后整合,得到过滤视频,以实现精确过滤掉所述当前视频的每一帧中的冗余数据。
61.s242基于所述目标提取模型的输入尺寸对所述过滤视频进行尺寸调整,得到输入视频;
62.具体的,对所述过滤视频进行尺寸调整后,可增加后续训练的流畅程度。
63.s243将所述输入视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。
64.s3基于所述目标无人机和目标障碍物生成最优编队策略;
65.具体方式为:
66.s31基于目标期望队形生成多个初步编队策略;
67.s32使用所述目标无人机和目标障碍物对每一所述初步编队策略进行模拟,得到最优编队策略。
68.具体的,基于每一所述初步编队策略的模拟结果,从多个所述初步编队策略中选取最佳策略,并基于每一所述模拟结果对所述最佳策略进行优化,得到最优编队策略。
69.s4基于所述最优编队策略控制所述集群无人机进行队列调整。
70.本发明的一种集群无人机再编队方法,通过对摄像头进行清洁,使用清洁后的摄像头拍摄任意空白画面,得到拍摄视频,对所述拍摄视频的清晰度是否合格进行判断,当所述拍摄视频清晰度合格,执行下一步,获取集群无人机数据集,构建网络模型,对所述集群无人机数据集中的无人机和障碍物进行标注,得到标注数据集,将所述标注数据集划分为训练集和验证集,使用所述训练集对所述网络模型进行训练,得到训练模型,使用所述验证集对所述训练模型进行验证,验证通过,得到目标提取模型,对所述当前视频进行过滤,得到过滤视频,基于所述目标提取模型的输入尺寸对所述过滤视频进行尺寸调整,得到输入视频,将所述输入视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物,基于目标期望队形生成多个初步编队策略,使用所述目标无人机和目标障碍物对每一所述初步编队策略进行模拟,得到最优编队策略,基于所述最优编队策略控制所述集群无人机进行队列调整。
71.以上所揭露的仅为本发明一种集群无人机再编队方法较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。