技术特征:
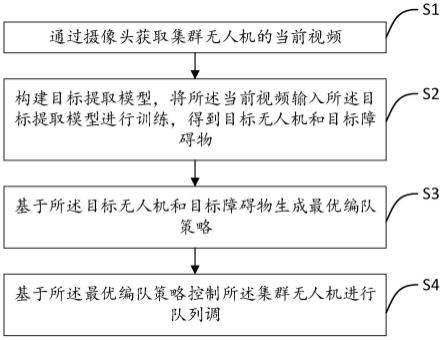
1.一种集群无人机再编队方法,其特征在于,包括以下步骤:通过摄像头获取集群无人机的当前视频;构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物;基于所述目标无人机和目标障碍物生成最优编队策略;基于所述最优编队策略控制所述集群无人机进行队列调整。2.如权利要求1所述的集群无人机再编队方法,其特征在于,所述构建目标提取模型,将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的具体方式为:获取集群无人机数据集;构建网络模型;使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型;将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。3.如权利要求2所述的集群无人机再编队方法,其特征在于,所述使用所述集群无人机数据集对所述网络模型进行训练,得到目标提取模型的具体方式为:对所述集群无人机数据集中的无人机和障碍物进行标注,得到标注数据集;将所述标注数据集划分为训练集和验证集;使用所述训练集对所述网络模型进行训练,得到训练模型;使用所述验证集对所述训练模型进行验证,验证通过,得到目标提取模型。4.如权利要求3所述的集群无人机再编队方法,其特征在于,所述训练集和所述验证集的比例为8:2。5.如权利要求4所述的集群无人机再编队方法,其特征在于,所述将所述当前视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物的具体方式为:对所述当前视频进行过滤,得到过滤视频;基于所述目标提取模型的输入尺寸对所述过滤视频进行尺寸调整,得到输入视频;将所述输入视频输入所述目标提取模型进行训练,得到目标无人机和目标障碍物。6.如权利要求5所述的集群无人机再编队方法,其特征在于,所述基于所述目标无人机和目标障碍物生成最优编队策略的具体方式为:基于目标期望队形生成多个初步编队策略;使用所述目标无人机和目标障碍物对每一所述初步编队策略进行模拟,得到最优编队策略。
技术总结
本发明涉及变量控制技术领域,具体涉及一种集群无人机再编队方法,包括通过摄像头获取集群无人机的当前视频;构建目标提取模型,将当前视频输入目标提取模型进行训练,得到目标无人机和目标障碍物;基于目标无人机和目标障碍物生成最优编队策略;基于最优编队策略控制集群无人机进行队列调整,通过目标提取模型可增加对目标集群无人机提取的精确度,解决了现有的集群无人机再编队方法的再编队效果较差的问题。的问题。的问题。
技术研发人员:赵中原
受保护的技术使用者:浙江天翼通智能科技有限公司
技术研发日:2022.07.04
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。