一种使用mipi与hssl通信接口的daniellin型汽车激光雷达系统
技术领域
1.本发明涉及汽车激光雷达领域,尤其是一种使用mipi与hssl通信接口的daniellin型汽车激光雷达系统。
背景技术:
2.早期激光雷达主要用于军事和民用地理测绘(gis)等领域,比如地质测绘、监测树木生长、测量建筑项目进度等。随着自动驾驶的兴起,对于环境感知要求日趋严格,在自动驾驶架构中,传感层被比作为汽车的“眼睛”,包括车载摄像头等视觉系传感器和车载毫米波雷达、车载激光雷达和车载超声波雷达等雷达系传感器,其中激光雷达已经被广泛认为是实现自动驾驶的必要传感器。相比于其它类型的自动驾驶传感器,如摄像头,激光雷达探测的距离更远,精度更高。但现有接收传感器使用分离元件,体积较大;接收传感器部分接口没有整合通信,开发较困难。
技术实现要素:
3.本发明的目的是通过提出一种使用mipi与hssl通信接口的daniellin型汽车激光雷达系统,以解决上述背景技术中提出的缺陷。
4.本发明采用的技术方案如下:
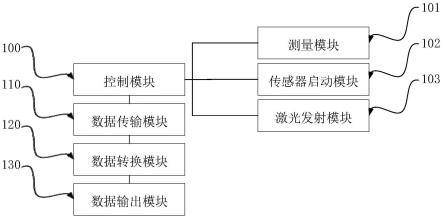
5.提供一种使用mipi与hssl通信接口的daniellin型汽车激光雷达系统,包括:
6.控制模块:初始化参数,进行装置初始化控制;
7.数据传输模块:传感器接收光子转成点云数据,透过mipi接口输出fpga;
8.数据转换模块:fpga将点云数据加上crc校验转换成hssl接口给mcu;
9.数据输出模块:mcu将点云数据转换成车载以太网协议输出给transceiver。
10.作为本发明的一种优选技术方案:所述控制模块包括:
11.测量模块:初始化参数,设定光学镜片mirror角度;
12.传感器启动模块:初始化参数,启动spads传感器;
13.激光发射模块:初始化参数,利用激光发射器vcsel,发射激光。
14.作为本发明的一种优选技术方案:所述测量模块中,利用fpga控制光学镜面切换需要测量的位置。
15.作为本发明的一种优选技术方案:所述传感器启动模块中,启动spads接收激光反射光子。
16.作为本发明的一种优选技术方案:所述激光发射模块中,利用fpga控制激光雷射管发出垂直的雷射光。
17.作为本发明的一种优选技术方案:所述数据传输模块中传感器接收光子的方法采用飞行时间测量法,所述飞行时间测量法中,激光雷达向目标发射探测信号,将接收到的从目标反射回来的信号与发射信号进行时间比较,激光雷达计算处理后,获得目标的距离信
息,通过更换光学的角度,得出目标物的点云图。
18.作为本发明的一种优选技术方案:所述飞行时间测量法中,激光雷达发出激光脉冲开始计时,记为t1,当激光遇到目标物体光返回,接收端停止计时,记为t2,根据公式:
19.距离=光速
×
(t
2-t1)/2
20.获得目标的距离信息。
21.作为本发明的一种优选技术方案:所述激光雷达型号为daniellin型;所述激光雷达测距方式为脉冲式测距;所述激光雷达发射的探测信号的激光波段为905nm;所述激光雷达的激光等级为i级,激光通道为192路通道。
22.作为本发明的一种优选技术方案:所述控制模块中,qspi模块通过fpga 3v3_100端口与电源开关模块连接,实现spi通信功能;记忆体模块一、记忆体模块二和记忆体模块三分别通过fpga_1v5端口与电源模块b连接,记忆体模块四通过fpga_3v3_100端口与电源开关模块连接,用于增加记忆体;jtag接口通过fpga_3v3_101端口与电源开关模块连接,用于调用fpga;晶振模块一通过fpga_3v3_101端口和fpga_3v3_102端口与电源开关模块连接,晶振模块二通过fpga_vdd2v5端口与电源模块c连接,用于提供fpga基础时钟。
23.作为本发明的一种优选技术方案:所述控制模块中,i/o模块一通过fpga_3v3_106端口与电源开关模块连接,i/o模块二通过fpga_3v3_107端口与电源开关模块连接,实现i/o通信功能;hssl模块通过dovdd端口与电源模块c连接,实现高速spi通信功能;晶振模块三通过fpga_vdd1v8_aux端口和fpga_vdd1v8_pll端口和fpga_1v0_vccsd端口分别与电源模块b和电源模块c连接,用于提供fpga基础时钟。本发明提供的使用mipi与hssl通信接口的daniellin型汽车激光雷达系统,与现有技术相比,有益效果有:
24.本发明采用mipi接口与hssl接口,两种高速通信比之前使用的分离元件采样方式传输效果更优秀,数字化的传输可靠性更高,错误率更低。
25.本daniellin型激光雷达系统同时加入了crc16校验,可以确保数据在传输过程中的正确性。
26.本daniellin型激光雷达系统采用aurix mcu使用车载以太网协议,可以确保在汽车应用使用上满足时间敏感网路的需求。
附图说明
27.图1为本发明优选实施例的系统框图;
28.图2为本发明优选实施例的电源开关模块电路图;
29.图3为本发明优选实施例的电源模块b电路图;
30.图4为本发明优选实施例的电源模块c电路图;
31.图5为本发明优选实施例的fpga的qspi模块电路图;
32.图6为本发明优选实施例的fpga的jtag接口电路;
33.图7为本发明优选实施例的fpga记忆体模块一电路图;
34.图8为本发明优选实施例的fpga晶振模块一电路图;
35.图9为本发明优选实施例的fpga记忆体模块二电路图;
36.图10为本发明优选实施例的fpga晶振模块二电路图;
37.图11为本发明优选实施例的fpga的hssl模块电路;
38.图12为本发明优选实施例的fpga的i/o模块一电路图;
39.图13为本发明优选实施例的fpga的i/o模块二电路图;
40.图14为本发明优选实施例的电源模块d电路图;
41.图15为本发明优选实施例的fpga晶振模块三电路图;
42.图16为本发明优选实施例的mcu网路通信模块一电路图。
43.图中各个标记的意义为:
44.100、控制模块;101、测量模块;102、传感器启动模块;103、激光发射模块;110、数据传输模块;120、数据转换模块;130、数据输出模块。
具体实施方式
45.需要说明的是,在不冲突的情况下,本实施例中的实施例及实施例中的特征可以相互组合,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.参照图1-16,本发明优选实施例提供了一种使用mipi与hssl通信接口的daniellin型汽车激光雷达系统,包括:
47.控制模块100:初始化参数,进行装置初始化控制;
48.数据传输模块110:传感器接收光子转成点云数据,透过mipi接口输出fpga;
49.数据转换模块120:fpga将点云数据加上crc校验转换成hssl接口给mcu;
50.数据输出模块130:mcu将点云数据转换成车载以太网协议输出给transceiver。
51.作为本发明的一种优选技术方案:所述控制模块100包括:
52.测量模块101:初始化参数,设定光学镜片mirror角度;
53.传感器启动模块102:初始化参数,启动spads传感器;
54.激光发射模块103:初始化参数,利用激光发射器vcsel,发射激光。
55.所述测量模块101中,利用fpga控制光学镜面切换需要测量的位置。
56.所述传感器启动模块102中,启动spads接收激光反射光子。
57.所述激光发射模块103中,利用fpga控制激光雷射管发出垂直的雷射光。
58.所述数据传输模块110中传感器接收光子的方法采用飞行时间测量法,所述飞行时间测量法中,激光雷达向目标发射探测信号,将接收到的从目标反射回来的信号与发射信号进行时间比较,激光雷达计算处理后,获得目标的距离信息,通过更换光学的角度,得出目标物的点云图。
59.所述飞行时间测量法中,激光雷达发出激光脉冲开始计时,记为t1,当激光遇到目标物体光返回,接收端停止计时,记为t2,根据公式:
60.距离=光速
×
(t
2-t1)/2
61.获得目标的距离信息。
62.所述激光雷达型号为daniellin型;所述激光雷达测距方式为脉冲式测距;所述激光雷达发射的探测信号的激光波段为905nm;所述激光雷达的激光等级为i级,激光通道为192路通道。
63.所述控制模块100中,qspi模块通过fpga 3v3_100端口与电源开关模块连接,实现spi通信功能;记忆体模块一、记忆体模块二和记忆体模块三分别通过fpga_1v5端口与电源模块b连接,记忆体模块四通过fpga_3v3_100端口与电源开关模块连接,用于增加记忆体;jtag接口通过fpga_3v3_101端口与电源开关模块连接,用于调用fpga;晶振模块一通过fpga_3v3_101端口和fpga_3v3_102端口与电源开关模块连接,晶振模块二通过fpga_vdd2v5端口与电源模块c连接,用于提供fpga基础时钟。
64.所述控制模块100中,i/o模块一通过fpga_3v3_106端口与电源开关模块连接,i/o模块二通过fpga_3v3_107端口与电源开关模块连接,实现i/o通信功能;hssl模块通过dovdd端口与电源模块c连接,实现高速spi通信功能;晶振模块三通过fpga_vdd1v8_aux端口和fpga_vdd1v8_pll端口和fpga_1v0_vccsd端口分别与电源模块b和电源模块c连接,用于提供fpga基础时钟。
65.本实施例中,通过控制模块100初始化参数,测量模块101将光学镜片角度指向右下半区,传感器启动模块102启动spads接收器,激光发射模块103利用激光发射器vcsel发射激光光束。数据传输模块110中fpga通过mipi接口,接收到下方第1行96点的数据,并计算时间差,产生激光点云数据。
[0066]“点云数据封包转换步骤a”:接收96点的数据,数据转换模块120将点云数据加上crc16较验后通过hssl协议发送到mcu;数据输出模块130中,mcu将第一行数据依据车载以太网协议转成网路封包,向后端transceiver发送。
[0067]
依序切换到下方第2行~第6400行,重复“点云数据封包转换步骤a”得到下半部的点云数据。
[0068]
利用测量模块101将光学镜片角度指向右上半区,传感器启动模块102启动spads接收器,激光发射模块103利用激光发射器vcsel发射激光光束。接收到上方第1行96点的激光点云。
[0069]
重复“点云数据封包转换步骤a”;依序切换到上方第2行~第6400行,得到上半部的点云数据;重复“点云数据封包转换步骤a”。
[0070]
以上为一帧点云数据的采集与发送,之后就是持续重复点云的采样与发送,得到下一帧的点云数据,本设备预设每秒20帧点云数据。
[0071]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0072]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
