1.本发明涉及一种管道检查装置,特别涉及一种能自动完成管道内壁检查的装置和方法,属于无损检测技术领域。
背景技术:
2.管道用于输送气体和液体,在生产生活中应用广泛,要保证管道的正常工作,必须定期对其进行检查和维护,以确保管道的使用安全。采用工业相机对管道内壁进行摄影并储存图像信号,再将图像信号传输给工业计算机进行识别,是直观检查管道内壁缺陷的有效方法。由于缺乏可靠的输送装置,检查人员难以检查管道内壁深处的状况,需要一种安全可靠的自动化检查装置高效高质量地完成管道内壁的检查。
技术实现要素:
3.本发明的目的在于提供一种管道内壁步进式检查装置及检查方法,以解决现有的管道内壁检查设备无法在管道内自动行进自动检查的问题。
4.本发明通过以下技术方案予以实现:一种管道内壁步进式检查装置,包括顺次连接成联合体的第一定心机构、测量机构、行进机构和第二定心机构,第一定心机构和第二定心机构结构相同对称设置,且分别位于联合体的首部和尾部,分别包括外壳、定心丝杠、定心锥台体、定心机构电机和数个定心臂组合,所述外壳两端分别与第一法兰和第二法兰固定连接,定心丝杠两端通过轴承分别支撑在第一法兰中心内侧中心和第二法兰内侧中心上;所述定心锥台体与定心丝杠旋合;定心臂组合轴线分别垂直于定心锥台体轴线,定心臂组合一端分别嵌入在定心锥台体锥台面的数条均布的轴向槽中,定心臂组合另一端垂直伸出外壳;定心机构电机分别固定在第一法兰中心上,定心机构电机轴分别与定心丝杠一端端头固定连接;测量机构轴向移动前,第一定心机构的数个定心臂组合另一端和第二定心机构的数个定心臂组合另一端交替伸长,分别压紧在管道内壁对应的位置上;第一定心机构的第二法兰外侧与测量机构一端相连,测量机构另一端与行进机构一端相连,行进机构另一端与第二定心机构一端相连。
5.本发明的目的还可以通过以下技术措施来进一步实现。
6.进一步的,所述行进机构包括壳体、内法兰、外法兰、行进丝杠和行进机构驱动电机,内法兰固定在第二筒形法兰一侧上,第二筒形法兰固定在壳体一端上,旋转编码器固定在内法兰上,旋转编码器的输入轴与固定座另一端延伸的第二轴固定连接;行进机构驱动电机固定在壳体另一端内,外法兰固定在壳体另一端外,行进丝杠一端端头与行进机构驱动电机轴固定连接,并通过行进机构支撑轴承支撑在外法兰中,行进丝杠另一端拧入固定在第二定心机构一端的第二法兰上的传动螺母中。
7.进一步的,所述定心锥台体锥台面的轴向槽为t型槽,所述定心臂组合包括底部小车和上部支撑臂,所述底部小车分别嵌入对应的t型槽中,所述定心锥台体的小端端头还设有挡片;上部支撑臂下端穿过外壳的径向孔与底部小车上端螺纹连接。上部支撑臂上端与
支撑靴中部垂直固定连接,支撑靴的顶面为弧形面,所述弧形面与管道内孔匹配,弧形面上制有滚花。所述底部小车两端分别装有一对滚轮,所述滚轮外径与所述t型槽的高度匹配,一对滚轮外侧面之间的距离l与所述t型槽的宽度匹配。
8.进一步的,数个导向机构均布在外法兰、第二法兰和传动螺母之间,包括导向杆、第二法兰导向孔和传动螺母导向孔,导向杆一端分别依次穿过第二法兰导向孔和传动螺母导向孔,通过外法兰两侧的紧固螺母分别固定在外法兰对应的位置上,导向杆头部径向延伸出限位头,导向杆一端分别与第二法兰导向孔和传动螺母导向孔间隙配合。
9.一种管道内壁步进式检查装置的检查方法,包括以下步骤:1)将装配好的第一定心机构、测量机构、行进机构和第二定心机构的联合体推入待检查的管道内;2)分别正向启动第一定心机构的定心机构电机和反向启动第二定心机构的定心机构电机,第一定心机构的定心机构电机带动定心丝杠正向转动,第二定心机构的定心机构电机带动定心丝杠反向转动,第一定心机构的定心锥台体向着测量机构方向移动,第二定心机构的定心锥台体向着行进机构方向移动,两个定心机构的定心锥台体上数个定心臂组合上部的支撑靴分别同步外伸压紧在管道内壁对应的位置上,使得第一定心机构和第二定心机构分别处于支撑固定在管道内壁中的锁定状态;3)启动测量机构的测量机构电机,测量机构电机带动固定座旋转一周,从而带动固定座上的工业相机拍摄管道内壁一周的图像,图像通过视频电缆或wifi传输至工业计算机,完成管道内壁的第一段检查;4)反向启动第一定心机构的定心机构电机,第一定心机构的定心机构电机带动定心丝杠反向转动,第一定心机构的定心锥台体向着背离测量机构方向移动,第一定心机构的定心锥台体上数个定心臂组合上部的支撑靴分别同步缩回脱离管道内壁,第一定心机构解锁;接着反向启动行进机构驱动电机,行进机构驱动电机带动行进丝杠反向转动,第二定心机构的数个定心臂组合上部的支撑靴仍处于外伸压紧在管道内壁的锁定状态,行进丝杠边反向转动边向着行进机构方向移动,依次通过行进机构、测量机构推动第一定心机构向着管道深处移动第一个步距后,重复步骤3)的过程,完成管道内壁的第二段检查;5)正向启动第二定心机构的定心机构电机,第二定心机构的定心机构电机带动定心丝杠正向转动,第二定心机构的定心锥台体向着背离行走机构方向移动,第二定心机构的定心锥台体上数个定心臂组合上部的支撑靴分别同步缩回脱离管道内壁,第二定心机构解锁;然后反向启动第一定心机构的定心机构电机,第一定心机构的定心机构电机带动定心丝杠反向转动,第一定心机构的定心锥台体向着测量机构方向移动,使得第一定心机构上数个定心臂组合上部的支撑靴分别同步外伸压紧在管道内壁对应的位置上,第一定心机构处于锁定状态;接着反向启动行进机构驱动电机,行进机构驱动电机带动行进丝杠反向转动,通过传动螺母带动第二定心机构向着行进机构方向移动一个步距后;再重复步骤4)中第一定心机构解锁、第二定心机构锁定过程,然后反向启动行进机构,推动第一定心机构向着管道深处移动第二个步距;接着重复步骤3)的过程,完成第三段管道内壁的检查;以此类推,第一定心机构和第二定心机构交替锁定和解锁,通过行进机构交替推动第一定心机构和第二定心机构向着管道深处步进式移动,逐段完成管道内壁的检查。
10.本发明的定心机构采用定心锥台体与定心丝杠的螺旋传动型式及定心臂组合分
别嵌在定心锥台体锥台面的轴向槽上的结构,改变定心丝杠的转向,就能使数个定心臂组合或外伸压紧在定心机构的壳体内侧面上锁定对应的定心机构,或缩回使对应的定心机构解锁后便于联合体步进式移动,就能使工业相机能逐段拍照检查管道内壁。两个定心机构的数个定心臂组合交替收放,当一个定心机构的数个定心臂组合外伸锁定在管道内壁上时,另一个定心机构的数个定心臂缩回便于行进机构推动该定心机构在管道内移动一个步距,从而实现了本发明在管道内的自动移动。操作方便省力,且不会损坏管道内壁,降低了人力物力成本,提高了工作效率。
11.本发明的优点和特点,将通过下面优选实施例的非限制性说明进行图示和解释,这些实施例,是参照附图仅作为例子给出的。
附图说明
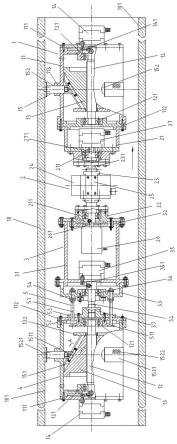
12.图1是本发明的结构图;图2是图1的左视图;图3是图1的a-a剖视放大图。
具体实施方式
13.下面结合附图和实施例对本发明作进一步说明。
14.在本发明的描述中,“中心”、“上”、“下”、“左”、“右”、“内”、“外”、“第一”和“第二”、“首”、“尾”等指示方位或位置关系的术语是基于附图所示的方位或位置关系,而不是指示或暗示所指的装置必须具有特定的方位。
15.如图1和图2所示,本发明包括从右至左顺次连接成联合体的第一定心机构1、测量机构2、行进机构3和第二定心机构4,第一定心机构1和第二定心机构4结构相同对称设置,且分别位于联合体的首部和尾部,分别包括外壳11、定心丝杠12、定心锥台体13、定心机构电机14和3个定心臂组合15,外壳11为筒形体,其两端分别与第一法兰111和第二法兰112固定连接,定心丝杠12两端通过轴承121分别支撑在第一法兰111中心内侧中心和第二法兰112内侧中心上。定心锥台体13与定心丝杠12旋合。定心臂组合15轴线分别与定心锥台体13轴线垂直,定心臂组合15一端分别嵌入在定心锥台体13锥台面的3条均布的轴向槽中,定心锥台体13的小端端头还设有挡片132,防止定心臂组合15脱离定心锥台体13,定心臂组合151另一端垂直伸出外壳11。定心机构电机14分别固定在第一法兰111中心上,定心机构电机轴141分别与定心丝杠12一端端头固定连接。测量机构2轴向移动前,第一定心机构1的3个定心臂组合15另一端和第二定心机构4的数个定心臂组合15另一端交替伸长,分别压紧在管道内壁101对应的位置上。第一定心机构1的第二法兰112外侧与测量机构2一端相连,测量机构2另一端与行进机构3一端相连,行进机构3另一端与第二定心机构4一端相连。
16.如图1和图3所示,定心锥台体锥台面的轴向槽为t型槽131,定心臂组合15包括底部小车151和上部支撑臂152,底部小车151分别嵌入对应的t型槽131中,上部支撑臂152下端穿过外壳11的径向孔113与底部小车151的中心柱1511上端螺纹连接。上部支撑臂152上端与支撑靴1521中部垂直固定连接,支撑靴1521的顶面为与管道内壁101匹配的弧形面,弧形面上制有滚花1522,增大了支撑靴1521压紧在管道内壁101上的摩擦力,便于定心机构锁定在管道内壁101上。底部小车151两端分别装有一对滚轮153,滚轮153外径与t型槽的高度
匹配,一对滚轮153外侧面之间的距离l与t型槽的宽度匹配。便于底部小车151在t型槽中滚动,实现支撑靴1521的升降。
17.测量机构2包括第一筒形法兰21、第二筒形法兰22、固定座23、工业相机24、配重块25、旋转编码器26和测量机构电机27,工业相机24固定在固定座23一侧上,配重块25固定在固定座23另一侧上。第一筒形法兰21固定在第一定心机构1的第二法兰112的左侧上,第二筒形法兰22固定在行进机构2的右侧上。固定座23右端延伸的第一轴231伸进第一筒形法兰21中,支撑在第一筒形法兰21内的支撑轴承211上,且与固定在第一筒形法兰21内侧的测量机构电机输出轴271固定连接。固定座23左端延伸的第二轴232伸进行进机构3右端的第二筒形法兰22中,支撑在第二筒形法兰22内的支撑轴承211上,且与固定在行进机构2内侧的旋转编码器26的输入轴261固定连接;测量机构2左端通过行进机构3与第二定心机构4右端相连。旋转编码器26用于控制测量机构电机27的转动,使其只能转动一周,完成所在位置的管道内壁101一周的摄影。
18.本实施例的定心机构电机14、测量机构电机27和行进机构驱动电机35均采用伺服电机,可以精确控制定心丝杠12的转速,确保定心臂组合15伸长能锁定对应的定心机构,缩回便于定心机构移动。也可精确控制测量机构电机27的转角,确保拍摄出清晰的管道内壁101图像。还能对行进机构驱动电机35进行调速,提高联合体移动的步距精度。
19.行进机构3包括壳体31、内法兰32、外法兰33、行进丝杠34和行进机构驱动电机35,内法兰32固定在第二筒形法兰22左侧上,第二筒形法兰22固定在壳体31的右端上,旋转编码器26固定在内法兰32上,行进机构驱动电机35固定在壳体31左端内,外法兰33固定在壳体31左端外,行进丝杠34右端端头与行进机构驱动电机轴351固定连接,并通过行进机构支撑轴承36支撑在外法兰33中,行进丝杠34左端拧入固定在第二定心机构4右端的第二法兰112上的传动螺母37中。
20.4个导向机构5均布在外法兰33、第二法兰112和传动螺母37之间,包括导向杆51、第二法兰导向孔52和传动螺母导向孔53,导向杆51一端分别依次穿过第二法兰导向孔52和传动螺母导向孔53,通过外法兰33两侧的紧固螺母54分别固定在外法兰33对应的位置上,导向杆51头部径向延伸出限位头511,防止导向杆51脱离第二法兰导向孔52和传动螺母导向孔53,导向杆51右端分别与第二法兰导向孔52和传动螺母导向孔53间隙配合。导向机构5对第二定心机构4的移动精度,进而对整个联合体的移动精度提供了可靠的保证。
21.一种管道内壁步进式检查装置的检查方法,包括以下步骤:1)将装配好的第一定心机构1、测量机构2、行进机构3和第二定心机构4的联合体推入待检查的管道10内。
22.2)分别正向启动第一定心机构1的定心机构电机14和反向启动第二定心机构4的定心机构电机14,第一定心机构1的定心机构电机14带动定心丝杠12正向转动,第二定心机构4的定心机构电机14带动定心丝杠12反向转动,第一定心机构1的定心锥台体13向着测量机构2方向移动,第二定心机构4的定心锥台体13向着行进机构3方向移动,两个定心机构的定心锥台体13上数个定心臂组合15上部的支撑靴1521分别同步外伸压紧在管道内壁101对应的位置上,使得第一定心机构1和第二定心机构4分别处于支撑固定在管道内壁101中的锁定状态。
23.3)启动测量机构2的测量机构电机27,测量机构电机27带动固定座23旋转一周,从
而带动固定座23上的工业相机24拍摄管道内壁101一周的图像,图像通过视频电缆或wifi传输至工业计算机,完成管道内壁101的第一段检查;4)反向启动第一定心机构的定心机构电机14,第一定心机构1的定心机构电机14带动定心丝杠12反向转动,第一定心机构1的定心锥台体13向着背离测量机构2的方向即向右移动,第一定心机构1的定心锥台体13上3个定心臂组合15上部的支撑靴1521分别同步缩回脱离管道内壁101,第一定心机构1解锁。接着反向启动行进机构驱动电机35,行进机构驱动电机35带动行进丝杠34反向转动,第二定心机构4的3个定心臂组合15上部的支撑靴1521仍处于外伸压紧在管道内壁101的锁定状态,行进丝杠34边反向转动边向着行进机构3方向即向右移动,依次通过行进机构3、测量机构2推动第一定心机构1向着管道10深处方向即如图1中箭头所指方向移动第一个步距后,重复步骤3)的过程,完成管道内壁101的第二段检查。
24.5)正向启动第二定心机构4的定心机构电机14,第二定心机构4的定心机构电机14带动定心丝杠12正向转动,第二定心机构4的定心锥台体13向着背离行走机构3方向即向左移动,第二定心机构4的定心锥台体13上3个定心臂组合15上部的支撑靴1521分别同步缩回脱离管道内壁101,第二定心机构4解锁。然后反向启动第一定心机构1的定心机构电机14,第一定心机构1的定心机构电机14带动定心丝杠12反向转动,第一定心机构1的定心锥台体13向着测量机构2方向即向左移动,使得第一定心机构1上3个定心臂组合15上部的支撑靴1521分别同步外伸压紧在管道内壁101对应的位置上,第一定心机构1处于锁定状态。接着反向启动行进机构驱动电机35,行进机构驱动电机35带动行进丝杠34反向转动,通过传动螺母37带动第二定心机构4向着行进机构3方向即向右移动一个步距后;再重复步骤4)中第一定心机构1解锁、第二定心机构4锁定过程,然后反向启动行进机构3,推动第一定心机1构向着管道10深处移动第二个步距。接着重复步骤3)的过程,完成第三段管道内壁101的检查。以此类推,第一定心机构1和第二定心机构4交替锁定和解锁,通过行进机构3交替推动第一定心机构1和第二定心机构4如图1中箭头所指方向,向着管道10深处步进式移动,逐段完成管道内壁101的检查。
25.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。