1.本实用新型涉及探测机器人领域,特别是涉及一种海洋工程用水下探测机器人。
背景技术:
2.水下探测机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种,水下探测机器人的技术难度更大,其中机械臂、推进器、升沉补偿系统是技术核心,其关键技术涉及能源、精确定位、零可见度导航、高强度和轻质及耐腐蚀结构材料与浮力材料技术、作业技术、声学技术、回收技术等,而且设备操控需要专业团队来进行,现有的水下探测机器人大多具有较好的使用效果,但也存在一定的不足,相信会得到进一步的发展。
3.现有的海洋工程用水下探测机器人在使用时存在一定的弊端,海洋工程用水下探测机器人在利用吊缆吊入水里或者在吊出水面的过程中,其吊缆固定措施比较一般,操作不当时会出现吊缆头部松动的情况,从而对机器人的吊出和吊入工作造成影响,且海洋工程用水下探测机器人在水里移动时,绳索会对探测机器人造成干扰。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的问题,提出一种方便连接绳索和机器人本体的海洋工程用水下探测机器人。
5.本实用新型的技术方案:一种海洋工程用水下探测机器人,包括机器人本体、连接架、探测模组、连接绳索、连接杆、卡接块和推动机构;
6.连接架设置有两个,两个连接架均设置在机器人本体上,且分别位于机器人本体的两边;探测模组设置在机器人本体上;卡接块设置有多个,多个卡接块分别滑动设置在连接杆的两端;连接杆的两端分别转动设置在两个连接架的上;卡接块的一端突出连接杆并与连接架抵接;连接杆上设置有用于驱动卡接块移动的抵接机构和推动机构。
7.优选的,连接杆上设置有安装槽;卡接块位于安装槽内;抵接机构包括支撑柱、弹性件和推块;支撑柱设置在连接杆上;推块设置在卡接块上,推块滑动设置在支撑柱上;弹性件设置在支撑柱上,弹性件的两端分别与连接杆和推块上。
8.优选的,推动机构包括螺纹杆、升降块、连杆和导轨;导轨滑动设置在连接杆上;升降块设置在导轨上;螺纹杆与连接杆螺纹连接;螺纹杆与升降块转动连接;连杆设置有两个;连杆的两端分别与卡接块和升降块转动连接。
9.优选的,螺纹杆的上端设置有转动块;转动块与升降块抵接。
10.优选的,连接架上设置有轴承;连接杆设置在轴承上。
11.优选的,连接架上设置有保护板;保护板与轴承抵接。
12.优选的,机器人本体的下端为履带驱动。
13.优选的,机器人本体上设置有螺旋桨。
14.与现有技术相比,本实用新型具有如下有益的技术效果:
15.本实用新型中,通过连接绳索将对连接杆进行支撑,连接杆的两端卡在两个连接架上,从而实现连接绳索与连接架的连接,在使用时,将连接杆安装到连接架上,抵接机构和推动机构推动卡接块伸出连接杆,使得卡接块与连接架卡接,完成对连接杆的固定,向下放下连接绳索,从而能够将机器人本体放入到水中,并使它下沉到水底,进行探测工作,由于连接绳索是与连接杆连接,而连接杆能够与连接架转动,从而能够避免连接绳索对机器人本体的移动产生干扰,使得机器人本体能够自由的移动,方便通过探测模组对周围进行探测;在探测完成后,向上卷收连接绳索,连接绳索带动连接杆移动,连接杆带动连接架移动,使得连接架带动机器人本体移动,能够将机器人本体收回,通过推动机构驱动卡接块收回,从而能够使得卡接块解除对连接杆的限位,能够将连接杆拆下,从而实现机器人本体与连接杆分离,能够更换不同用途的机器人本体,方便使用。
附图说明
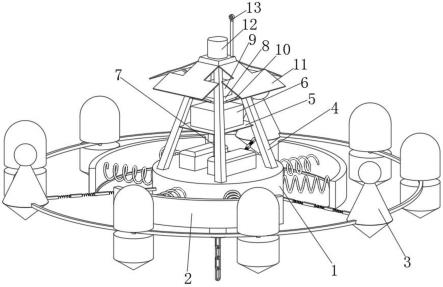
16.图1为本实用新型中实施例的结构示意图;
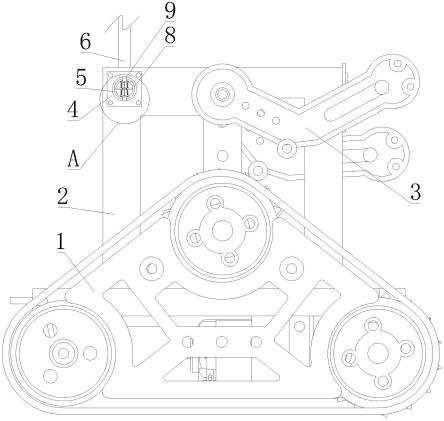
17.图2为本实用新型中实施例的局部结构示意图;
18.图3为图1中a处的局部放大结构示意图。
19.附图标记:1、机器人本体;2、连接架;3、探测模组;4、保护板;5、轴承;6、连接绳索;7、连接杆;8、安装槽;9、卡接块;10、抵接机构;1001、支撑柱;1002、弹性件;1003、推块;11、推动机构;1101、螺纹杆;1102、升降块;1103、连杆;1104、转动块。
具体实施方式
20.实施例一
21.如图1-3所示,本实用新型提出的一种海洋工程用水下探测机器人,包括机器人本体1、连接架2、探测模组3、连接绳索6、连接杆7、卡接块9和推动机构11;
22.连接架2设置有两个,两个连接架2均设置在机器人本体1上,且分别位于机器人本体1的两边;探测模组3设置在机器人本体1上;卡接块9设置有多个,多个卡接块9分别滑动设置在连接杆7的两端;连接杆7的两端分别转动设置在两个连接架2的上;卡接块9的一端突出连接杆7并与连接架2抵接;连接杆7上设置有用于驱动卡接块9移动的抵接机构10和推动机构11。
23.连接架2上设置有轴承5;连接杆7设置在轴承5上。连接架2上设置有保护板4;保护板4与轴承5抵接;轴承能够减少连接杆7与连接架2之间的摩擦力,方便连接杆7转动,防止连接绳索6对机器人本体产生干扰。
24.机器人本体1的下端为履带驱动,履带驱动能够适应各种复杂的路面,方便在海底移动。机器人本体1上设置有螺旋桨,螺旋桨能够使得机器人本体在水中移动,方便其快速的移动到指定位置。
25.本实施例中,通过连接绳索6将对连接杆7进行支撑,连接杆7的两端卡在两个连接架2上,从而实现连接绳索6与连接架2的连接,在使用时,将连接杆7安装到连接架2上,抵接机构10和推动机构11推动卡接块9伸出连接杆7,使得卡接块9与连接架2卡接,完成对连接
杆7的固定,向下放下连接绳索6,从而能够将机器人本体1放入到水中,并使它下沉到水底,进行探测工作,由于连接绳索6是与连接杆7连接,而连接杆7能够与连接架2转动,从而能够避免连接绳索6对机器人本体1的移动产生干扰,使得机器人本体1能够自由的移动,方便通过探测模组3对周围进行探测;在探测完成后,向上卷收连接绳索6,连接绳索6带动连接杆7移动,连接杆7带动连接架2移动,使得连接架2带动机器人本体1移动,能够将机器人本体1收回,通过推动机构11驱动卡接块9收回,从而能够使得卡接块9解除对连接杆7的限位,能够将连接杆7拆下,从而实现机器人本体1与连接杆7分离,能够更换不同用途的机器人本体1,方便使用。
26.实施例二
27.如图1-3所示,本实用新型提出的一种海洋工程用水下探测机器人,相较于实施例一,本实施例中的连接杆7上设置有安装槽8;卡接块9位于安装槽8内;抵接机构10包括支撑柱1001、弹性件1002和推块1003;支撑柱1001设置在连接杆7上;推块1003设置在卡接块9上,推块1003滑动设置在支撑柱1001上;弹性件1002设置在支撑柱1001上,弹性件1002的两端分别与连接杆7和推块1003上。
28.本实施例中,支撑柱1001对弹性件1002进行支撑,弹性件1002推动推块1003移动,推块1003推动卡接块9移动,使得卡接块9伸出安装槽8,防止卡接块9收回,且能够有效的防止在使用时,卡接块9松动,导致连接杆7掉落。
29.实施例三
30.如图1-3所示,本实用新型提出的一种海洋工程用水下探测机器人,相较于实施例一或实施例二,本实施例中的推动机构11包括螺纹杆1101、升降块1102、连杆1103和导轨;导轨滑动设置在连接杆7上;升降块1102设置在导轨上;螺纹杆1101与连接杆7螺纹连接;螺纹杆1101与升降块1102转动连接;连杆1103设置有两个;连杆1103的两端分别与卡接块9和升降块1102转动连接;螺纹杆1101的上端设置有转动块1104;转动块1104与升降块1102抵接。
31.本实施例中,导轨对升降块1102进行支撑和导向;当需要将卡接块9收回至安装槽8内时,转动转动块1104,转动块1104带动螺纹杆1101转动,使得螺纹杆1101向上伸出,螺纹杆1101带动升降块1102向上移动,升降块1102带动连杆1103向上移动,连杆1103带动卡接块9收回至安装槽8内,解除对连接杆7的限位,使得连接杆7能够拆下。
32.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。