1.本实用新型涉及铝窗行业技术领域,具体为铝窗窗框包装缠绕机。
背景技术:
2.目前铝窗行业,特别是家装,其铝窗窗框的包装是采取人工套上护角,手工裹上珍珠棉、纸皮后,用宽度80
‑‑‑
120的拉伸膜手工缠绕,固定并完全裹住珍珠棉、纸皮。缠绕珍珠棉、纸皮占了整个包装90%的时间,现在除了人工完成缠绕之前的10%的准备工作外,用该设备可以替代80%的手工缠绕工作,只需要人工把护角事先固定铝窗四个角上,珍珠棉、纸皮预先简单固定在铝窗边框上,后续可以用设备实现拉伸膜的缠绕,除其内腔宽度太小和立体弧形门窗需要手工缠绕外,其余都可以实现机械自动缠绕。因此我们便提出了铝窗窗框包装缠绕机能够很好的解决以上问题。
技术实现要素:
3.本实用新型的目的在于提供铝窗窗框包装缠绕机,以解决上述背景技术提出的目前市场在对铝窗窗框的包装是采取人工套上护角,其工作效率比较低下,使用时比较费时费力问题。
4.为实现上述目的,本实用新型提供如下技术方案:铝窗窗框包装缠绕机,包括外壳以及铝合金门窗框架本体;
5.其中,所述外壳的内部伸入设置有铝合金门窗框架本体;
6.还包括:
7.所述外壳内部的左右两侧位置均安装有工件升降夹紧机构,且所述外壳内部的顶部位置设有工件托辊组,所述工件托辊组的顶部设置有可更换的铝合金门窗框架本体;
8.所述外壳的顶部位置安装有缠绕头x轴运动驱动机构,所述缠绕头x轴运动驱动机构的一端设置在缠绕头x轴导轨横梁的外侧,所述外壳内侧顶部左右位置设置有缠绕头y轴运动机构部件,且所述缠绕头y轴运动机构部件设置在缠绕头y轴导轨横梁的外侧。
9.优选的,所述工件升降夹紧机构的内部设置有旋转气缸,且旋转气缸的活动范围为0到90
°
,从而方便对铝合金门窗框架本体进行限位支撑。
10.优选的,所述缠绕头x轴导轨横梁关于外壳的内部竖直中心位置对称设置,所述工件托辊组关于外壳的内部位置等间距分布,故而方便调节主缠绕头本体的位置。
11.优选的,所述外壳的内壁的顶端位置固定设置有缠绕头本体水平以及垂直转位驱动气缸,且主缠绕头本体的后上方设置有缠绕头升降气缸,所述缠绕头升降气缸,所述缠绕头本体水平以及垂直转位驱动气缸的底部位置设置有缠绕头升降行程微调驱动伺服电机及螺母副,所述缠绕头本体水平以及垂直转位驱动气缸底部的另一侧位置安装有缠绕头摆动驱动伺服电机及蜗杆箱,所述主缠绕头本体设置在缠绕头摆动驱动伺服电机及蜗杆箱的下方,所述主缠绕头本体的前侧表面位置设置有缠绕头缠绕运动驱动伺服电机,从而更加方便进行缠绕。
12.优选的,所述缠绕头升降行程微调驱动伺服电机及螺母副的调整范围为
±
70毫米范围,且所述缠绕头本体水平以及垂直转位驱动气缸的底端位置与缠绕头升降行程微调驱动伺服电机及螺母副之间为一体化设置,进而方便进行微调整。
13.与现有技术相比,本实用新型的有益效果设置结构如下:
14.(1)该铝窗窗框包装缠绕机,设置有缠绕头本体,确认缠绕头本体开口是水平开口还是垂直开口,通个指令指挥缠绕头缠绕运动驱动伺服电机,一次性旋转90
°
完成缠绕头初步定位,当缠绕头调整好位置后,软件控制系统发出指令,控制缠绕头内部的一个缠绕膜固定气缸,气缸推动缠绕膜到框料的断面上,然后缠绕头原地缠绕2周,完成缠绕膜端头固定,同时固定气缸收回,开始缠绕,从而完成缠绕;
15.(2)该铝窗窗框包装缠绕机,设置有工件升降夹紧机构,当铝合金门窗框架本体进入缠绕区域后,系统根据产品信息,指挥工件升降夹紧机构内部包含的支撑气缸围绕纵向中心线进行宽度调整,调整宽度为600
‑‑‑‑‑
2000毫米,调整到位后,气缸升起,完成成品的支撑,从而方便对铝合金门窗框架本体的支撑。
附图说明
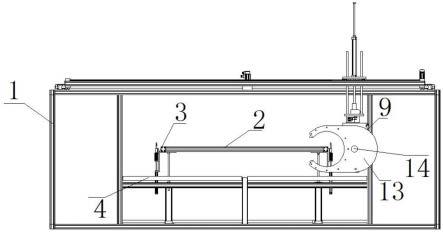
16.图1为本实用新型主视剖面结构示意图;
17.图2为本实用新型缠绕头x轴运动驱动机构左视剖面结构示意图;
18.图3为本实用新型缠绕头x轴运动驱动机构主视剖面结构示意图;
19.图4为本实用新型缠绕头本体左视剖面结构示意图;
20.图5为本实用新型缠绕头本体工作状态结构示意图。
21.图中:1、外壳;2、铝合金门窗框架本体;3、工件升降夹紧机构;4、工件托辊组;5、缠绕头x轴运动驱动机构;6、缠绕头x轴导轨横梁;7、缠绕头y轴运动机构部件;8、缠绕头y轴导轨横梁;9、缠绕头本体水平以及垂直转位驱动气缸;10、缠绕头升降气缸;11、缠绕头升降行程微调驱动伺服电机及螺母副;12、缠绕头摆动驱动伺服电机及蜗杆箱;13、主缠绕头本体;14、缠绕头缠绕运动驱动伺服电机。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-5,本实用新型提供一种技术方案:铝窗窗框包装缠绕机,包括外壳1以及铝合金门窗框架本体2;工件升降夹紧机构3的内部设置有旋转气缸,且旋转气缸的活动范围为0到90
°
;其中,外壳1的内部伸入设置有铝合金门窗框架本体2;还包括:外壳1内部的左右两侧位置均安装有工件升降夹紧机构3,且外壳1内部的顶部位置设有工件托辊组4,工件托辊组4的顶部设置有可更换的铝合金门窗框架本体2;外壳1的顶部位置安装有缠绕头x轴运动驱动机构5,缠绕头x轴运动驱动机构5的一端设置在缠绕头x轴导轨横梁6的外侧,缠绕头x轴导轨横梁6关于外壳1的内部竖直中心位置对称设置,工件托辊组4关于外壳1的内部位置等间距分布;外壳1内侧顶部左右位置设置有缠绕头y轴运动机构部件7,且缠绕头y
轴运动机构部件7设置在缠绕头y轴导轨横梁8的外侧。
24.结合附图1和附图5,首先在对铝窗窗框进行支撑时,通过10个气缸支撑着工件,随后当铝合金门窗框架本体2进入缠绕区域后,系统根据产品信息,指挥缠绕头缠绕运动驱动伺服电机14所包含的支撑气缸围绕纵向中心线进行宽度宽度调整,调整宽度为600
‑‑‑‑‑
2000毫米,调整到位后,工件升降夹紧机构3所包含的气缸升起,完成对铝合金门窗框架本体2的支撑;当主缠绕头本体13工作后移动到接近缠绕头升降气缸10的位置时,控制系统发出指令,即将与主缠绕头本体13发生干涉的缠绕头升降气缸10降下去,避开主缠绕头本体13和缠绕头升降气缸10的干涉,使得缠绕动作继续,并且缠绕头升降气缸10端部连接缠绕头升降行程微调驱动伺服电机及螺母副11,当产品完成定位,缠绕头升降行程微调驱动伺服电机及螺母副11旋转90
°
并向下夹紧产品,防止产品因受外力水平移动,通过以上设置,从而完成对铝合金门窗框架本体2的支撑处理。
25.外壳1的内壁的顶端位置固定设置有缠绕头本体水平以及垂直转位驱动气缸9,且主缠绕头本体13的后上方设置有缠绕头升降气缸10,缠绕头升降气缸10,缠绕头本体水平以及垂直转位驱动气缸9的底部位置设置有缠绕头升降行程微调驱动伺服电机及螺母副11,缠绕头本体水平以及垂直转位驱动气缸9底部的另一侧位置安装有缠绕头摆动驱动伺服电机及蜗杆箱12,主缠绕头本体13设置在缠绕头摆动驱动伺服电机及蜗杆箱12的下方,主缠绕头本体13的前侧表面位置设置有缠绕头缠绕运动驱动伺服电机14。缠绕头升降行程微调驱动伺服电机及螺母副11的调整范围为
±
70毫米范围,且缠绕头本体水平以及垂直转位驱动气缸9的底端位置与缠绕头升降行程微调驱动伺服电机及螺母副11之间为一体化设置。
26.结合附图1、附图4和附图5,首先用扫码枪扫码扫码二维码或者事先将图纸拷贝到设备的pc机中,接到指令后,软件会根据产品形状,计算出行走路径,然后指挥缠绕头x轴运动驱动机构5和缠绕头y轴运动机构部件7分别在缠绕头x轴导轨横梁6和缠绕头y轴导轨横梁8上行走,随后当主缠绕头本体13到达指定位置后,首先确认主缠绕头本体13开口是水平开口还是垂直开口,通个指令指挥缠绕头本体水平以及垂直转位驱动气缸9,一次性旋转90
°
完成缠绕头初步定位,并且当主缠绕头本体13到达指定位置,且完成水平缠绕或者是垂直缠绕的调整后,在垂直方向上主缠绕头本体13通过主缠绕头本体13完成垂直方向的初步定位,然后利用缠绕头升降行程微调驱动伺服电机及螺母副11;当主缠绕头本体13调整好位置后,软件控制系统发出指令,控制主缠绕头本体13内部的一个缠绕膜固定气缸,气缸推动缠绕膜到框料的断面上,然后缠绕头原地缠绕2周,完成缠绕膜端头固定,同时固定气缸收回,开始缠绕;当缠绕膜接近转角处或者是t字型处,或者是十字型处时,软件控制系统控制缠绕膜的缠绕速度,同时启动缠绕膜角度控制缠绕头缠绕运动驱动伺服电机14,调整缠绕膜与材料轴心的角度,完成局部缠绕,然后在继续缠绕边框或者是退出本段型材的缠绕,进入到另一个型腔中,开始另一个断面型材的缠绕;如果完成一个从起点到终点的缠绕工作,需要重新确认新的起点,如果新的起点距离上一个终点距离比较长,则切断气缸伸出,切断拉伸膜,缠绕机头脱离缠绕离开终点,移动到新的起点,然后在新的起点重新固定缠绕带;如果型腔宽度太小,缠绕头伸不进去,则软件控制系统在计算路径时自动规避该段后面由操作工手动缠绕;在缠绕带防护栏的时候,起点位置可以由操作工人工干预确定起点和终点,缠绕膜每缠绕一周,缠绕机头轴向一定一个固定的距离可以人工设定。
27.工作原理:首先在对铝窗窗框进行支撑时,通过10个气缸支撑着工件,随后当铝合金门窗框架本体2进入缠绕区域后,系统根据产品信息,指挥缠绕头缠绕运动驱动伺服电机14所包含的支撑气缸围绕纵向中心线进行宽度调整,从而完成对铝合金门窗框架本体2的支撑处理;首先用扫码枪扫码二维码或者事先将图纸拷贝到设备的pc机中,接到指令后,软件会根据产品形状,计算出行走路径,然后指挥缠绕头x轴运动驱动机构5和缠绕头y轴运动机构部件7分别在缠绕头x轴导轨横梁6和缠绕头y轴导轨横梁8上行走,且完成水平缠绕或者是垂直缠绕的调整后,在垂直方向上主缠绕头本体13通过主缠绕头本体13完成垂直方向的初步定位,然后利用缠绕头升降行程微调驱动伺服电机及螺母副11;当主缠绕头本体13调整好位置后,软件控制系统发出指令,控制主缠绕头本体13内部的一个缠绕膜固定气缸,气缸推动缠绕膜到框料的断面上,然后缠绕头原地缠绕2周,完成缠绕膜端头固定,同时固定气缸收回,开始缠绕;然后在继续缠绕边框或者是退出本段型材的缠绕,进入到另一个型腔中,开始另一个断面型材的缠绕;如果完成一个从起点到终点的缠绕工作,则软件控制系统在计算路径时自动规避该段;在缠绕带防护栏的时候,起点位置可以由操作工人工干预确定起点和终点,缠绕膜每缠绕一周,缠绕机头轴向一定一个固定的距离。
28.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
29.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
