1.本发明涉及电池技术领域,具体提供一种用于圆柱电池的装配装置及方法。
背景技术:
2.圆柱电池在装配过程中包括电芯入壳的阶段,电芯入壳一般采用接触式入壳的方式,钢壳圆心与电芯圆心尽可能同轴设置,依靠气缸压力或者凸轮轴推力,使钢壳在保持静止的情况下,将电芯竖直插入到钢壳内,由于是接触式入壳,在入壳过程中,电芯的隔膜很容易与钢壳壁边缘接触产生摩擦,由于入壳力度大、速度快,在电芯入壳的过程中容易造成隔膜破损,甚至极耳断裂,因此,电芯竖直插入静止的钢壳内的良率较低。
3.相应地,本领域需要一种新的用于圆柱电池的装配装置及方法来解决现有的圆柱电池在电芯竖直插入钢壳的过程中容易出现摩擦破损的问题。
技术实现要素:
4.本发明旨在解决上述技术问题,即,解决现有的圆柱电池在电芯竖直插入钢壳的过程中容易出现摩擦破损的问题。
5.在第一方面,本发明提供一种用于圆柱电池的装配装置,所述圆柱电池包括钢壳和圆柱电芯,所述装配装置包括夹持机构和插入机构,所述夹持机构用于夹住所述钢壳进行旋转,所述插入机构用于向所述夹持机构夹持的所述钢壳内插入所述圆柱电芯。
6.在上述用于圆柱电池的装配装置的优选技术方案中,所述夹持机构包括旋转装置和设置在所述旋转装置上的夹持装置,所述夹持装置用于夹住所述钢壳,所述旋转装置用于带动所述夹持装置与被夹持的钢壳一起旋转。
7.在上述用于圆柱电池的装配装置的优选技术方案中,所述旋转装置是伺服电机,所述夹持装置包括控制所述钢壳上下运动的升降气缸、设置在所述升降气缸的末端并用于夹紧所述钢壳的夹紧气缸以及与所述夹紧气缸相连的夹紧臂。
8.在上述用于圆柱电池的装配装置的优选技术方案中,所述装配装置还包括旋转平台,所述旋转平台能带动所述钢壳运动到预设工位,所述旋转平台上设置有吸附所述钢壳的钢壳吸附机构。
9.在上述用于圆柱电池的装配装置的优选技术方案中,所述钢壳吸附机构上设置有磁铁。
10.在上述用于圆柱电池的装配装置的优选技术方案中,所述旋转平台上还设置有推拉气缸,所述推拉气缸用于实现对所述钢壳吸附机构的推拉。
11.在上述用于圆柱电池的装配装置的优选技术方案中,所述装配装置还包括真空吸附机构,所述真空吸附机构上设置有真空吸头,所述真空吸头用于吸附所述钢壳内的杂质。
12.本发明还提供了一种用于圆柱电池的装配方法,所述圆柱电池包括钢壳和圆柱电芯,其特征在于,所述装配装置包括夹持机构和插入机构,所述夹持机构用于夹住所述钢壳进行旋转,所述插入机构用于向所述夹持机构夹持的所述钢壳内插入所述圆柱电芯;
13.所述装配方法包括:
14.当所述钢壳运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳;
15.控制所述夹持机构旋转所述钢壳;
16.控制所述插入机构向旋转的所述钢壳内插入所述圆柱电芯。
17.在上述用于圆柱电池的装配方法的优选技术方案中,所述装配装置还包括真空吸附机构,所述真空吸附机构上设置有真空吸头,所述真空吸头用于吸附所述钢壳内的杂质,所述装配方法还包括:
18.当所述钢壳运动到真空吸附工位时,控制所述真空吸附机构吸附所述钢壳内的粉尘。
19.在上述用于圆柱电池的装配方法的优选技术方案中,所述装配装置还包括旋转平台,所述旋转平台能带动所述钢壳运动到预设工位,所述旋转平台上设置有吸附所述钢壳的钢壳吸附机构,
[0020]“当所述钢壳运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳”的步骤具体包括:
[0021]
当所述钢壳被所述钢壳吸附机构吸住并被所述旋转平台旋转运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳。
[0022]
在上述用于圆柱电池的装配方法的优选技术方案中,所述旋转平台上还设置有推拉气缸,所述推拉气缸用于实现对所述钢壳吸附机构的推拉,
[0023]
所述装配方法还包括:
[0024]
在所述夹持机构夹住所述钢壳之后,通过所述推拉气缸控制所述钢壳吸附机构向远离所述钢壳的方向撤出。
[0025]
在上述用于圆柱电池的装配方法的优选技术方案中,所述装配方法还包括:
[0026]
当所述钢壳吸附机构旋转运动到上料工位时,控制所述钢壳吸附机构吸附住所述钢壳。
[0027]
在采用上述技术方案的情况下,本发明能够通过钢壳吸附机构上的磁铁将钢壳牢牢吸住,防止钢壳在运动过程中从旋转平台上掉落,另外,通过真空吸附机构吸附钢壳内的杂质,可以减少电芯插入时与钢壳内壁上杂质的摩擦,降低杂质造成圆柱电芯损伤的可能,同时真空吸附机构的真空吸头可以控制粉尘等杂质的去向;电芯插入工位处的夹持装置通过控制升降气缸和夹紧气缸实现夹紧臂对钢壳的夹紧,通过旋转装置实现钢壳的旋转,在圆柱电芯插入到钢壳内部的过程中旋转钢壳,可以减小圆柱电芯与钢壳内壁的摩擦,钢壳内的杂质在钢壳旋转过程中不会因为圆柱电芯的出入而集中堆叠,解决了现有技术中集中堆叠的杂质与圆柱电芯产生摩擦的问题,旋转平台上的推拉气缸可以推出或拉回钢壳吸附机构,防止在电芯插入时钢壳被钢壳吸附机构吸附住而不能被旋转装置带动旋转。
[0028]
方案1、一种用于圆柱电池的装配装置,所述圆柱电池包括钢壳和圆柱电芯,其特征在于,所述装配装置包括夹持机构和插入机构,所述夹持机构用于夹住所述钢壳进行旋转,所述插入机构用于向所述夹持机构夹持的所述钢壳内插入所述圆柱电芯。
[0029]
方案2、根据方案1所述的用于圆柱电池的装配装置,其特征在于,所述夹持机构包括旋转装置和设置在所述旋转装置上的夹持装置,所述夹持装置用于夹住所述钢壳,所述
旋转装置用于带动所述夹持装置与被夹持的钢壳一起旋转。
[0030]
方案3、根据方案2所述的用于圆柱电池的装配装置,其特征在于,所述旋转装置是伺服电机,所述夹持装置包括控制所述钢壳上下运动的升降气缸、设置在所述升降气缸的末端并用于夹紧所述钢壳的夹紧气缸以及与所述夹紧气缸相连的夹紧臂。
[0031]
方案4、根据方案1所述的用于圆柱电池的装配装置,其特征在于,所述装配装置还包括旋转平台,所述旋转平台能带动所述钢壳运动到预设工位,所述旋转平台上设置有吸附所述钢壳的钢壳吸附机构。
[0032]
方案5、根据方案4所述的用于圆柱电池的装配装置,其特征在于,所述钢壳吸附机构上设置有磁铁。
[0033]
方案6、根据方案4所述的用于圆柱电池的装配装置,其特征在于,所述旋转平台上还设置有推拉气缸,所述推拉气缸用于实现对所述钢壳吸附机构的推拉。
[0034]
方案7、根据方案1所述的用于圆柱电池的装配装置,其特征在于,所述装配装置还包括真空吸附机构,所述真空吸附机构上设置有真空吸头,所述真空吸头用于吸附所述钢壳内的杂质。
[0035]
方案8、一种用于圆柱电池的装配方法,所述圆柱电池包括钢壳和圆柱电芯,其特征在于,所述装配装置包括夹持机构和插入机构,所述夹持机构用于夹住所述钢壳进行旋转,所述插入机构用于向所述夹持机构夹持的所述钢壳内插入所述圆柱电芯;
[0036]
所述装配方法包括:
[0037]
当所述钢壳运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳;
[0038]
控制所述夹持机构旋转所述钢壳;
[0039]
控制所述插入机构向旋转的所述钢壳内插入所述圆柱电芯。
[0040]
方案9、根据方案8所述的用于圆柱电池的装配方法,其特征在于,所述装配装置还包括真空吸附机构,所述真空吸附机构上设置有真空吸头,所述真空吸头用于吸附所述钢壳内的杂质,所述装配方法还包括:
[0041]
当所述钢壳运动到真空吸附工位时,控制所述真空吸附机构吸附所述钢壳内的粉尘。
[0042]
方案10、根据方案8所述的用于圆柱电池的装配方法,其特征在于,所述装配装置还包括旋转平台,所述旋转平台能带动所述钢壳运动到预设工位,所述旋转平台上设置有吸附所述钢壳的钢壳吸附机构,
[0043]“当所述钢壳运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳”的步骤具体包括:
[0044]
当所述钢壳被所述钢壳吸附机构吸住并被所述旋转平台旋转运动到电芯插入工位时,控制所述夹持机构向上运动并夹住所述钢壳。
[0045]
方案11、根据方案10所述的用于圆柱电池的装配方法,其特征在于,所述旋转平台上还设置有推拉气缸,所述推拉气缸用于实现对所述钢壳吸附机构的推拉,
[0046]
所述装配方法还包括:
[0047]
在所述夹持机构夹住所述钢壳之后,通过所述推拉气缸控制所述钢壳吸附机构向远离所述钢壳的方向撤出。
[0048]
方案12、根据方案10所述的用于圆柱电池的装配方法,其特征在于,所述装配方法还包括:
[0049]
当所述钢壳吸附机构旋转运动到上料工位时,控制所述钢壳吸附机构吸附住所述钢壳。
附图说明
[0050]
下面结合附图来描述本发明的优选实施方式,附图中:
[0051]
图1是本发明的用于圆柱电池的装配装置的旋转平台对应的各预设工位的示意图;
[0052]
图2是本发明的用于圆柱电池的装配装置的夹持机构的示意图;
[0053]
图3是本发明的用于圆柱电池的装配装置的夹持机构夹持圆柱电芯的主视图与俯视图;
[0054]
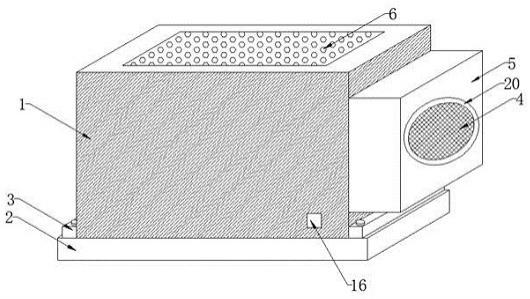
图4是本发明的用于圆柱电池的装配装置的真空吸附机构的示意图;
[0055]
图5是本发明的用于圆柱电池的装配装置的真空吸附机构的真空吸头吸附钢壳的示意图;
[0056]
图6是本发明的用于圆柱电池的装配方法的示意图。
[0057]
附图标记列表:
[0058]
1、夹持机构;11、旋转装置;12、夹持装置;121、升降气缸;122、夹紧气缸;123、夹紧臂;124、夹持装置的底部;2、钢壳;3、旋转平台;31、钢壳吸附机构;311、磁铁;32、推拉气缸;4、真空吸附机构;41、真空吸头;5、上料工位;6、真空吸附工位;7、电芯插入工位;8、缓冲工位;9、下料工位;10、圆柱电芯。
具体实施方式
[0059]
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。本领域技术人员可以根据需要对其作出调整,以便适应具体的应用场合。
[0060]
需要说明的是,在本发明的描述中,术语“上”、“下”、“竖直”“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0061]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“相连”应做广义理解,例如,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0062]
如图1-5所示,为解决现有的圆柱电池在电芯竖直插入钢壳2的过程中容易出现摩擦破损的问题,本发明的用于圆柱电池的装配装置包括夹持机构1和插入机构(图中未示出),圆柱电池包括钢壳2和圆柱电芯10。
[0063]
优选地,如图2、图3所示,夹持机构1包括旋转装置11和设置在旋转装置11上的夹持装置12,夹持装置12用于夹住钢壳2。夹持装置12包括控制钢壳2上下运动的升降气缸
121、设置在升降气缸121的末端并用于夹紧钢壳2的夹紧气缸122以及与夹紧气缸122相连的夹紧臂123。旋转装置11可以是伺服电机,旋转装置11用于带动夹持装置12与被夹持的钢壳2一起旋转(图3中俯视图的箭头方向为钢壳2旋转的方向)。插入机构用于向夹持机构1夹持的钢壳2内插入圆柱电芯10(图3中主视图的箭头方向为圆柱电芯10竖直插入到钢壳2内的方向)。
[0064]
优选地,如图1所示,装配装置还包括旋转平台3,旋转平台3能带动钢壳2运动到预设工位,旋转平台3上设置有吸附钢壳2的钢壳吸附机构31,钢壳吸附机构31上设置有能够吸住钢壳2的磁铁311,旋转平台3上还可以设置推拉气缸32,推拉气缸32可以实现对钢壳吸附机构31的推拉。
[0065]
优选地,如图4、图5所示,装配装置还可以包括真空吸附机构4,真空吸附机构4上设置有真空吸头41,真空吸头41可以吸附钢壳2内的杂质。
[0066]
上述装置的装配过程包括:当旋转平台3上的某一钢壳吸附机构31处于上料工位5时,本发明的旋转平台3上有多个钢壳吸附机构31,以下以其中一个钢壳吸附机构31参与的从上料到下料的过程为例,通过钢壳吸附机构31上的磁铁311吸附住钢壳2,之后旋转平台3带动钢壳2向真空吸附工位6旋转,当钢壳2运动到真空吸附工位6后,真空吸附机构4控制真空吸头41将钢壳2内的杂质吸出,在钢壳2内的杂质被吸附完成后,旋转平台3将钢壳2运转到下一工位。下一工位可以设置为缓冲工位8,缓冲工位8处也可以用来作为备用工位。钢壳2离开缓冲工位8后继续向下一工位运动,当钢壳2运动到电芯插入工位7时,启动夹持机构1和插入机构,夹持机构1的夹持装置12通过上下运动的升降气缸121控制夹紧臂123向上运动,当夹紧臂123的端部运动到钢壳2竖直方向的中间位置时,钢壳2的底部与夹持装置的底部124接触,此时升降气缸121停止工作,与夹紧臂123相连的夹紧气缸122开始工作以使夹紧臂123抱住钢壳2,在夹紧臂123抱紧钢壳2后,旋转平台3上的推拉气缸32带动钢壳吸附机构31向远离钢壳2的方向运动,以便后续旋转装置11可以带动钢壳2旋转而不受钢壳吸附机构31的影响,钢壳吸附机构31离开钢壳2后,旋转装置11启动并带动钢壳2旋转,此时插入机构在竖直方向上自上向下地向旋转的钢壳2内插入圆柱电芯10,在圆柱电芯10插入完毕后,推拉气缸32将钢壳吸附机构31向钢壳2方向推回以使钢壳吸附机构31吸附住钢壳2,此时启动夹紧气缸122控制夹紧臂123松开钢壳2,启动升降气缸121带动夹持机构1向下运动,之后旋转平台3带动钢壳2向余下的工位旋转并进行相应地工作,直至钢壳2运行到下料工位9后脱离旋转平台3,此时,本发明的圆柱电池的装配工作结束。
[0067]
如图1所示,旋转平台3上可以设置六个工位,每60
°
设置一个工位,保证钢壳2在工位与工位之间的运行时间相等,从而有利于各工位工作的衔接。由于圆柱电池的装配为批量装配,因此,上料工位5、真空吸附工位6、电芯插入工位7和下料工位9处的工作同时进行。
[0068]
上述设置方式的优点在于:钢壳吸附机构31上的磁铁311可以将钢壳2牢牢吸住,防止钢壳2在运动过程中从旋转平台3上掉落;真空吸附机构4可以吸附钢壳2内的杂质,防止钢壳运动到电芯插入工位7时,圆柱电芯10插入到钢壳2的过程中杂质与圆柱电芯10发生摩擦而使圆柱电芯10破损,真空吸附机构的设置可以降低杂质对圆柱电芯10造成损伤的可能,另外,真空吸附机构4的真空吸头41可以集中收集粉尘等杂质并将其排出,从而控制粉尘等杂质的去向,与现有的通过吹气式方式吹走钢壳2内的杂质相比,真空吸附的方式更有利于管控粉尘等杂质,防止对钢壳2造成二次污染。
[0069]
电芯插入工位7处的夹持装置12通过设置升降气缸121和夹紧气缸122从而实现夹紧臂123对钢壳2的夹紧与放松,在圆柱电芯10插入到钢壳2内部的过程中旋转钢壳2,与圆柱电芯10竖直插入到静止的钢壳2内相比,旋转钢壳2的方式可以减小圆柱电芯10与钢壳2内壁的摩擦,另外,现有的圆柱电芯10竖直插入到静止的钢壳2内,在插入工程中还很容易造成钢壳2内部粉尘等杂质在同一方向上集中堆叠,在杂质堆叠的过程中杂质进入到圆柱电芯10与钢壳2内壁之间,从而与圆柱电芯10发生摩擦,本发明通过控制钢壳2旋转,降低了粉尘集中堆叠的可能,从而降低了圆柱电芯10因为摩擦造成损伤的可能;夹持机构1的旋转装置11采用伺服电机,可以更准确地控制钢壳2的旋转精度,另外伺服电机与其他电机相比运行更稳定,可以保证圆柱电芯10平稳地插入到钢壳2内,电机加减速的动态相应时间更短,即伺服电机启动后可以很快达到钢壳2所需的转速。
[0070]
旋转平台3的设置可以使工作更加自动化,推拉气缸32的设置可以推出或拉回钢壳吸附机构31,防止在圆柱电芯10插入到钢壳2的过程中钢壳2被钢壳吸附机构31吸附住而不能被旋转装置11带动着旋转。
[0071]
缓冲工位8的设置可以为其后一工位提供其前一工位装配完成的钢壳2,从而尽可能避免因前一工位出现故障而使装配工作间断的情况发生,以图1中位于真空吸附工位6之后、电芯插入工位7之前的缓冲工位8为例,一旦真空吸附机构4出现故障,为防止自动化生产的工作间断,在缓冲工位8处可以提供已经进行过真空吸附的钢壳2,从而保证工作的正常进行,同时为真空吸附机构的维修争取时间,另外,缓冲工位8处也可以用来作为备用工位,以便在此工位上进行其他的装配需要的工作。
[0072]
最后参阅图6,本发明还提供了一种采用图1-5所示的用于圆柱电池的装配装置的装配方法。如图6所示,用于圆柱电池的装配方法包括以下步骤:
[0073]
步骤s100:当钢壳2运动到电芯插入工位7时,控制夹持机构1向上运动并夹住钢壳2。
[0074]
在一种优选的用于圆柱电池的装配方法中,可以在对钢壳2进行圆柱电芯10插入工作之前,对钢壳2内的杂质进行吸附,此时的装配装置还包括真空吸附机构4,真空吸附机构4上设置有真空吸头41,真空吸头41可以吸附钢壳2内的杂质,当钢壳2运动到真空吸附工位6时,控制真空吸附机构4吸附钢壳2内的粉尘。
[0075]
在另一种优选的用于圆柱电池的装配方法中,钢壳2可以通过旋转运动到电芯插入工位7,此时的装配装置还包括旋转平台3,在旋转平台3上设置有吸附钢壳2的钢壳吸附机构31,当钢壳2被钢壳吸附机构31吸住并被旋转平台3旋转到电芯插入工位7时,控制夹持机构1向上运动并夹住钢壳2。
[0076]
在又一种优选的用于圆柱电池的装配方法中,在旋转平台3上还设置有推拉气缸32,推拉气缸32可以实现对钢壳吸附机构31的推拉,在夹持机构1夹住钢壳2之后,通过推拉气缸32控制钢壳吸附机构31向远离钢壳2的方向撤出。
[0077]
在其他优选的用于圆柱电池的装配方法中,当钢壳吸附机构31旋转运动到上料工位5时,控制钢壳吸附机构31吸附住钢壳2。
[0078]
步骤s200:控制夹持机构1旋转钢壳2。
[0079]
步骤s300:控制插入机构向旋转的钢壳2内插入圆柱电芯10。
[0080]
综上所述,钢壳吸附机构31可以将钢壳2牢牢吸住,防止钢壳2在运动过程中从旋
转平台3上掉落;真空吸附机构4可以减少杂质与圆柱电芯10的摩擦,降低杂质对圆柱电芯10造成损伤的可能,同时还可以控制粉尘等杂质的去向;在圆柱电芯10插入过程中控制钢壳2旋转,可以减小圆柱电芯10与钢壳2内壁的摩擦,还可以减少杂质的集中堆叠,从而降低了圆柱电芯10因为摩擦造成损伤的可能;夹持机构1的旋转装置11采用伺服电机,伺服电机可以更准确地控制钢壳2的旋转精度,且运行更稳定;推拉气缸32的设置可以防止在圆柱电芯10插入时,钢壳2被钢壳吸附机构31吸附住而不能被旋转装置11带动着旋转;缓冲工位8可以为后一工位提供前一工位装配完成的钢壳2,一旦前一工位出现故障,在缓冲工位8处可以提供钢壳2向后一工位运动,从而防止工作间断,另外,缓冲工位8处也可以用来作为备用工位,以便在此工位上进行其他工作。
[0081]
需要说明的是,上述实施方式仅仅用来阐述本发明的原理,并非旨在与限制本发明的保护范围,在不偏离本发明原理的条件下,本领域技术人员能够对上述结构进行调整,以便本发明能够应用于更加具体的应用场景。
[0082]
例如,如图1所示,尽管说明书中是以在电芯插入工位7之前和之后设置缓冲工位8进行介绍的,但是缓冲工位8还可以设置在其他位置,只要缓冲工位8能起到备用或缓冲的效果即可。
[0083]
尽管说明书中是以设置六个工位进行介绍的,但是本发明还可以根据装配流程的需求设置大于或者小于六个工位,只要工位的设计满足装配工作的需求即可。
[0084]
尽管说明书中是以“当夹紧臂123的端部运动到钢壳2竖直方向的中间位置时,此时钢壳2的底部与夹持装置的底部124接触”进行介绍的,但是,本发明对夹紧臂123的长度不做限制,在钢壳2的底部与夹持装置的底部124接触时,夹紧臂123的端部可以位于钢壳2的中间部分或中间部分以上,也可以位于钢壳2的中间部分以下,只要夹紧臂123能够在钢壳2运动到电芯插入工位7后,通过升降气缸121和夹紧气缸122的控制起到夹持钢壳2的作用即可。
[0085]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。