1.本实用新型涉及一种用于盒盖上丝带半自动生产的手动丝带机。
背景技术:
2.为方便盒子的打开,一些盒子的盒盖上会设有丝带,丝带通过胶水粘接固定在盒盖表面。目前,盒盖上丝带的生产一般采用纯手工的生产方式或全自动的生产方式,纯手工的生产方式工作效率低,难以保证质量,全自动的生产方式虽然工作效率提高,也能很好保证质量,但设备结构往往会比较复杂,对于很多盒盖产品不能灵活适用。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是在于提供一种用于盒盖上丝带的半自动生产,提高生产效率、保证质量的手动丝带机。
4.为解决上述技术问题,本实用新型是采取如下技术方案来完成的:
5.手动丝带机,包括平台和丝带放料部件,其特征在于:平台上设有盒盖定位板,盒盖定位板的上方设有作上下活动的丝带夹爪,丝带夹爪由夹爪气缸推动进行开合动作,丝带夹爪上安装设有可外伸的压板,丝带夹爪的上下活动路径旁侧设有上胶滚轮,丝带夹爪在上限位置时,周边设有抽拉夹板、对折杆和切断烫头与之对应,抽拉夹板由夹板开合气缸推动进行开合动作,抽拉夹板由夹板升降气缸推动进行上下动作,对折杆由对折杆气缸推动进行横向动作,切断烫头由切断气缸推动进行横向动作,丝带放料部件位于抽拉夹板的上方位置。
6.盒盖定位板的内侧设有推料板,推料板由推料气缸推动进行推料动作。
7.丝带夹爪的上下活动由伺服电机通过同步带进行拉动。
8.所述压板的可外伸活动由压板气缸进行推动,压板气缸在丝带夹爪的上爪块上固定安装。
9.上述技术方案的手动丝带机,可进行盒盖上丝带的半自动生产,具体工作原理是:丝带从放料部件出来后,丝带头部到达抽拉夹板的上方,这时抽拉夹板提升将丝带头部进行夹住,然后将丝带下拉,丝带下拉设定长度距离后,对折杆从丝带中间位置推动丝带横向动作进入到丝带夹爪的夹口内(此时丝带夹爪的夹口处于打开状态),使丝带形成水平方向的双层对折,丝带对折后,丝带夹爪将丝带进行夹紧,随后对折杆回缩退出丝带夹爪然后回位,同时切断烫头动作将丝带夹爪夹住的丝带进行切断,丝带被切断后其上面的端头长于下面的端头,接着丝带夹爪下移,在经过上胶滚轮时,丝带的上下端头被涂上胶水,在丝带夹爪靠近下限位置时,压板进行外伸动作,此前,工人已经将盒盖放到平台上由盒盖定位板进行准确定位,这样当丝带夹爪到达下限位置后,丝带夹爪夹住的丝带就会被平放到盒盖的上丝带位置,并且在压板的下压作用下,丝带的上下端头被压紧,于是丝带被牢固粘接在盒盖上,随后丝带夹爪松开丝带,推料板将完成上丝带的盒盖推到外面,最后丝带夹爪回到上限位置,依此循环,完成盒盖上丝带的半自动生产,提高效率,保证质量。
附图说明
10.本实用新型有如下附图:
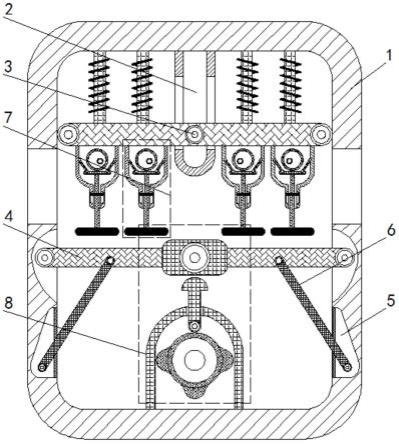
11.图1为本实用新型的结构示意图,
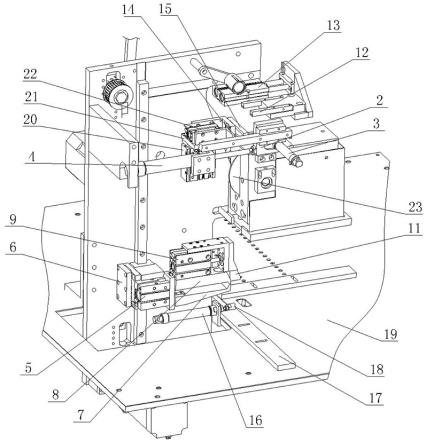
12.图2为图1的局部放大图(丝带夹爪在上限位置),
13.图3为图2的另一方向视图(丝带夹爪在靠近下限位置)。
具体实施方式
14.如图所示,本实用新型的手动丝带机,包括平台19和丝带放料部件24,平台19上设有盒盖定位板17,盒盖定位板17的内侧设有推料板18,推料板18由推料气缸16推动进行推料动作,盒盖定位板17的上方设有作上下活动的丝带夹爪(由上爪块8和下爪块7组成),丝带夹爪的上下活动由伺服电机通过同步带进行拉动,丝带夹爪由夹爪气缸5推动进行开合动作,夹爪气缸5固定安装于升降滑座6上,升降滑座6与同步带固定相连,丝带夹爪的上爪块8上安装设有可外伸的压板11,压板11的可外伸活动由压板气缸9进行推动,压板气缸9在丝带夹爪的上爪块8上固定安装,丝带夹爪的上下活动路径旁侧设有上胶滚轮23,上胶滚轮工作时作连续转动,将胶槽内的胶水送到经过的丝带上,丝带夹爪在上限位置时,周边设有抽拉夹板、对折杆1和切断烫头12与之对应,抽拉夹板由固定夹14和活动夹15组成,活动夹15由夹板开合气缸22推动进行开合动作,固定夹14、夹板开合气缸22在升降板21上固定安装,升降板21由夹板升降气缸20推动进行上下动作,对折杆1连接于伸缩气缸3上,伸缩气缸3在横向滑板2上固定安装,横向滑板2与对折杆气缸4连接,对折杆气缸4通过推动横向滑板2使对折杆1进行横向动作,切断烫头12由切断气缸13推动进行横向动作,丝带放料部件24位于抽拉夹板的上方位置,抽拉夹板的上方还设有压辊10压住丝带定位板对丝带放料部件放出的丝带进行定位。
15.本实用新型是这样工作的:丝带从放料部件出来后,丝带头部到达抽拉夹板的上方被压辊压住进行定位,这时抽拉夹板提升将丝带头部进行夹住,然后将丝带下拉,丝带下拉设定长度距离后,对折杆从丝带中间位置推动丝带横向动作进入到丝带夹爪的夹口内(此时丝带夹爪的夹口处于打开状态),使丝带形成水平方向的双层对折,丝带对折后,丝带夹爪将丝带进行夹紧,随后对折杆回缩退出丝带夹爪然后回位,同时切断烫头动作将丝带夹爪夹住的丝带进行切断,丝带被切断后其上面的端头长于下面的端头,接着丝带夹爪下移,在经过上胶滚轮时,丝带的上下端头被涂上胶水,在丝带夹爪靠近下限位置时,压板进行外伸动作,此前,工人已经将盒盖放到平台上由盒盖定位板进行准确定位,这样当丝带夹爪到达下限位置后,丝带夹爪夹住的丝带就会被平放到盒盖的上丝带位置,并且在压板的下压作用下,丝带的上下端头被压紧,于是丝带被牢固粘接在盒盖上,随后丝带夹爪松开丝带,推料板将完成上丝带的盒盖推到外面,最后丝带夹爪回到上限位置,依此循环,完成盒盖上丝带的半自动生产。
技术特征:
1.手动丝带机,包括平台和丝带放料部件,其特征在于:平台上设有盒盖定位板,盒盖定位板的上方设有作上下活动的丝带夹爪,丝带夹爪由夹爪气缸推动进行开合动作,丝带夹爪上安装设有可外伸的压板,丝带夹爪的上下活动路径旁侧设有上胶滚轮,丝带夹爪在上限位置时,周边设有抽拉夹板、对折杆和切断烫头与之对应,抽拉夹板由夹板开合气缸推动进行开合动作,抽拉夹板由夹板升降气缸推动进行上下动作,对折杆由对折杆气缸推动进行横向动作,切断烫头由切断气缸推动进行横向动作,丝带放料部件位于抽拉夹板的上方位置。2.如权利要求1所述的手动丝带机,其特征在于:盒盖定位板的内侧设有推料板,推料板由推料气缸推动进行推料动作。3.如权利要求1所述的手动丝带机,其特征在于:丝带夹爪的上下活动由伺服电机通过同步带进行拉动。4.如权利要求1所述的手动丝带机,其特征在于:所述压板的可外伸活动由压板气缸进行推动,压板气缸在丝带夹爪的上爪块上固定安装。
技术总结
本实用新型公开了一种手动丝带机,包括平台和丝带放料部件,其特征在于:平台上设有盒盖定位板,盒盖定位板的上方设有作上下活动的丝带夹爪,丝带夹爪由夹爪气缸推动进行开合动作,丝带夹爪上安装设有可外伸的压板,丝带夹爪的上下活动路径旁侧设有上胶滚轮,丝带夹爪在上限位置时,周边设有抽拉夹板、对折杆和切断烫头与之对应,抽拉夹板由夹板开合气缸推动进行开合动作,抽拉夹板由夹板升降气缸推动进行上下动作,对折杆由对折杆气缸推动进行横向动作,切断烫头由切断气缸推动进行横向动作,丝带放料部件位于抽拉夹板的上方位置。本实用新型用于盒盖上丝带的半自动生产,提高生产效率、保证质量。保证质量。保证质量。
技术研发人员:何鹏海
受保护的技术使用者:浙江海垟科技有限公司
技术研发日:2022.04.12
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。