1.本实用新型涉及机械爪手技术领域,具体为一种抓件手爪结构。
背景技术:
2.随着科技的不断进步发展,现今非常多的行业都逐渐运用机械代替人工进行工作,以此来提高生产效率,尤其是在一些自动化生产流水线上,许多工件的加工不只是一步就能完成,需要进行多个步骤的加工才能最终成型,而不同的加工步骤一般需要在不同的地方完成,所以需要将工件不断转运。而为了提高工作效率,转运工件时一般都是采用抓件结构将工件夹持,然后通过机械臂带动抓件结构将工件转运到下一个加工位置。
3.现有的抓件结构在抓取转运工件时,为了检测夹持件的位置,设有夹持件松开工件位置传感器以及夹持位置传感器,当夹持件位于松开位置传感器处时表示夹持件此时并未夹持工件,当夹持件位于夹持位置传感器处时表示此时夹持件夹住了工件,但是此种抓件结构在抓取转运工件的过程中,会存在以下问题:在实际抓取工件过程中,存在提早或者延迟抓取,致使抓取失败,但是只要当夹持件位于夹持位置传感器处时,系统便会默认夹持件已经成功抓取工件,导致无法分辨是否真的成功抓取工件。
技术实现要素:
4.本实用新型提供了一种抓件手爪结构,可以解决自动化生产线上转运工件时,无法分辨抓件是否成功抓取工件的问题。
5.本技术提供如下技术方案:
6.一种抓件手爪结构,包括连接板、固定连接在连接板两端的松开位置传感器和夹持位置传感器以及滑动连接在滑轨两端的夹持件,夹持件上连接有驱动件,所述连接板两端固定连接有无工件位置传感器,且无工件位置传感器连接在松开位置传感器远离夹持位置传感器的一侧;连接板两端分别设有夹持件固定的第一位置、第二位置以及第三位置,第一位置、第二位置以及第三位置分别与无工件位置传感器、夹持位置传感器以及松开位置传感器的位置对应。
7.本方案的有益效果在于:
8.1、能快速分辨夹持件是否成功抓取工件,保证后续加工程序顺利进行,进而保证加工效率:本方案通过在连接板上设置松开位置传感器、夹持位置传感器、无工件位置传感器三个位置传感器,三个位置传感器可以随时检测夹持件的位置并转换成输出信号,并将输出信号传输给控制系统。在抓取工件时,夹持件在驱动件的驱动下从松开位置传感器往夹持位置传感器滑动,若是滑动到夹持位置传感器时夹持件停止滑动,则表示此时夹持件成功抓取到了工件;若是夹持件滑动到夹持位置传感器后继续滑动,一直滑动到无工件位置传感器才停止滑动,则表示夹持件未抓取到工件。本方案通过将位置传感器设置为三个,在现有技术的基础上增加一个无工件位置传感器,在夹持件抓取工件时以此分辨夹持件是否成功抓取工件,保证后续的加工程序能够顺利进行,进而保证整体加工效率。
9.2、防止机械设备发生故障:在转运工件的过程中,若是工件未被成功抓取,未能成功进入到下一加工程序,容易干扰后续工件的加工,引起机械故障,而本方案通过增设一个无工件位置,能快速分辨是否成功抓取工件,若是没有成功抓取,工人能及时知晓及时处理,避免为被成功抓取的工件引起机械故障。
10.3、本装置结构简单可靠,安装方便,并且改造原来的抓件手爪结构也很方便,只用在原有的抓件手爪结构上增加一个位置传感器即可,易于实现。
11.进一步,所述无工件位置传感器连接在夹持位置传感器远离松开位置传感器的一侧2-10cm处。
12.采用上述技术方案,能防止由于无工件位置传感器与夹持工件位置之间的距离太远,无工件时夹持件需要移动的距离太远,导致检测太慢;还能防止由于无工件位置传感器与夹持工件位置之间的距离太近,无法成功检测工件位置的情况发生。
13.进一步,所述夹持件具体为夹爪手指,所述夹爪手指可以是l形、v形、圆弧形。
14.采用上述技术方案,结构简单,安全可靠,成本低,且能根据工件的形状选择合适的夹爪手指对工件进行抓取转运。
15.进一步,所述连接板上设有滑槽,夹爪手指滑动连接与滑槽内;所述第一位置、第二位置以及第三位置设于滑槽内。
16.采用上述技术方案,可以成功的将夹爪手指与连接板滑动连接,并使得夹爪手指的滑动能更加的方便。
17.进一步,所述连接板上连接有滑轨,夹爪手指连接滑动连接在滑轨上;所述第一位置、第二位置以及第三位置设于滑轨上。
18.采用上述技术方案,可以成功的将夹爪手指与连接板滑动连接,并使得夹爪手指的滑动能更加的方便。
19.进一步,所述第二位置处连接有弹性挡片。
20.采用上述技术方案,在夹持转运工件的过程中,当夹爪手指在气缸的驱动下移动到第二位置处时,弹性挡片可以减小夹爪手指的冲击力,防止夹爪手指与工件接触时对工件造成损坏。
21.进一步,所述夹爪手指与工件接触的一侧连接有弹性垫片。
22.采用上述技术方案,在抓取工件的过程中,可以使得夹爪手指与工件接触时,能有一定弹性,防止损坏或者刮花工件;还能防止在转运工件的过程中,工件发生滑动,使得转运时更加的稳定。
23.进一步,所述驱动件具体为气缸。
24.采用上述技术方案,更加便于控制,且安装简单,成本低。
附图说明
25.图1为本实用新型一种抓件手爪结构实施例一的结构示意图;
26.图2为本实用新型一种抓件手爪结构实施例一中夹爪手指与连接板连接处的剖视图;
27.图3为本实用新型一种抓件手爪结构实施例二的结构示意图;
28.图4为本实用新型一种抓件手爪结构实施例二中夹爪手指与滑轨连接处的剖视
图;
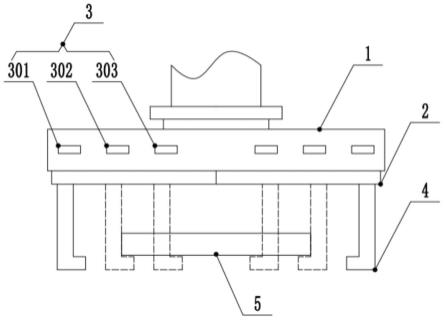
29.图5为本实用新型一种抓件手爪结构实施例三的结构示意图;
30.图6为本实用新型一种抓件手爪结构实施例三中第二位置处的剖视图。
具体实施方式
31.下面通过具体实施方式进一步详细说明:
32.说明书附图中的标记包括:连接板1、滑槽101、滑轨2、位置传感器3、夹爪手指4、工件5、弹性挡片6、松开位置传感器301、夹持位置传感器302、无工件位置传感器303。
33.实施例一
34.如图1以及图2所示,一种抓件手爪结构,包括连接板1,连接板1上连接有机械臂、位置传感器3以及滑动连接在连接板1两端的夹持件,连接板1上设有滑槽101,滑槽101两侧侧壁上设有侧槽,夹持件靠近滑槽101的一端设有伸入侧槽的侧凸,如图2所示,通过将夹持件上的侧凸伸入滑槽101两侧的侧槽实现夹持件与连接板1的滑动连接,滑槽101两端分别设有夹持件固定时的第一位置、第二位置以及第三位置。本实施例中夹持件具体为夹爪手指4,夹爪手指4可以是l形、v形、圆弧形,本实施例具体为如图1所示的l形,在抓取转运工件5时可以根据工件5的形状选择合适的夹爪手指4,夹爪手指4上连接有驱动件,本实施例中驱动件具体为气缸,气缸的动力输出端与夹爪手指4相连。连接板1上一共连接有6个位置传感器3,6个位置传感器3被分成两组,对称连接在连接板1两侧,夹爪手指4可以在同侧的三个位置感应器之间滑动,且每个位置传感器3均可以随时检测夹爪手指4的位置并转换成输出信号,并将输出信号传输给控制系统;连接板1左侧的3个位置传感器3从左往右依次表示松开位置传感器301、夹持位置传感器302以及无工件位置传感器303,连接板1右侧的3个位置传感器3从左往右依次表示无工件位置传感器303、夹持位置传感器302以及松开位置传感器301,无工件位置传感器303均连接在夹持位置传感器302远离松开位置传感器301的一侧2-10cm处,无工件位置传感器303、夹持位置传感器302以及松开位置传感器301分别与滑槽101两端的第一位置、第二位置以及第三位置对应,当不抓取工件5以及转运工件5完成时夹爪手指4均位于第三位置处,即松开位置传感器301的下端,如图1所示。
35.在自动化生产线上加工工件5时,当工件5加工完一个步骤需要转运到下一个加工位置时,夹爪手指4在气缸的驱动下从松开位置传感器301处往夹持位置传感器302处以及无工件5位置处滑动,此时会存在以下两种情形:一、若是夹爪手指4滑动到夹持位置传感器302处便停止滑动,则表示成功抓取到了工件5,夹持位置传感器302将输出信号传输给控制系统,控制机械臂带动连接板1将工件5转运到下一个加工位置,当工件5被转运到下一个加工位置后,夹爪手指4在气缸的驱动下从夹持位置传感器302处往松开位置传感器301处滑动,从而将工件5放下;二、若是夹爪手指4滑动到夹持位置传感器302处后并未停止滑动,而是继续滑动到无工件位置传感器303处,则表示未成功抓取到工件5,此时无工件位置传感器303传输信号给控制系统,工人便可根据信号进行检查,进而防止未被成功抓取的工件5影响后续的加工程序以及引起机械故障。本抓件手爪结构可以用于所有需要转运工件5的自动化生产线。
36.实施例二
37.如图3以及图4所示,本实施例与实施例一的区别在于,本实施例中连接板1上螺纹
连接有滑轨2,滑轨2两侧设有侧槽,夹爪手指4靠近滑轨2的一端设有侧凸,通过将夹爪手指4两侧的侧凸伸入滑轨2上的侧槽内实现夹爪手指4与滑轨2的滑动连接。
38.实施例三
39.如图5以及图6所示,本实施例与实施例一的区别在于,本实施例中第二位置处滑槽101两侧铰接有弹性挡片6,当夹爪手指4在气缸的驱动下移动到第二位置处时,弹性挡片6可以减小夹爪手指4对工件5的冲击力,防止夹爪手指4与工件5接触时对工件5造成损坏。若是夹持时没有工件5的情况下,夹爪手指4在气缸的驱动下能推开弹性挡片6,进而移动到第三位置处。
40.实施例四
41.本实施例与实施例一、二、三的区别在于,本实施例中夹爪手指4与工件5接触的一侧连接有弹性垫片,本实施例中弹性垫片具体为橡胶垫片。在抓取工件5的过程中,可以使得夹爪手指4与工件5接触时,能有一定弹性,防止损坏或者刮花工件5;还能防止在转运工件5的过程中,工件5发生滑动,使得转运时更加的稳定。
42.以上的仅是本实用新型的实施例,该实用新型不限于此实施案例涉及的领域,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
