1.本发明属于新能源汽车技术领域,具体涉及一种车辆能量回收控制方法及系统。
背景技术:
2.目前新能源汽车在小能量回收的情况下续航里程比较短,一般在400km左右,这种续航能力不能满足客户的真正需求,所以为提升新能源汽车全路面环境下的续航能力,开发了不同的能量回收等级,最高等级的能量回收产生的减速度可达0.25g,使得续航最大提高23%左右,但这么大的减速度在寒区冰雪路面驾驶及城市特殊路面(洒水瓷砖/泥泞路面)道路中对车辆的舒适性和安全性产生影响,如:
①
前轮抱死,abs触发且泵电机工作,产生nvh引起客户抱怨;
②
前轮抱死,abs触发能量回收退出,减速度有丢失感,引起客户恐慌;
③
低μ路面(冰面/洒水瓷砖/压实雪),能量回收增大减少引起整车顿挫,被客户感知抱怨;
④
低μ路面(冰面/洒水瓷砖/压实雪),转向时收油门踏板能量回收介入,车辆失去转向引起客户恐慌等。因此,目前的能量回收控制方案不能兼顾车辆的舒适安全和续航能力。
技术实现要素:
3.本发明实施例所要解决的技术问题在于,提供一种车辆能量回收控制方法及系统,以使能量回收在全路面环境可用,并保证车辆驾驶舒适性和安全性。
4.为解决上述技术问题,本发明提供一种车辆能量回收控制方法,包括:
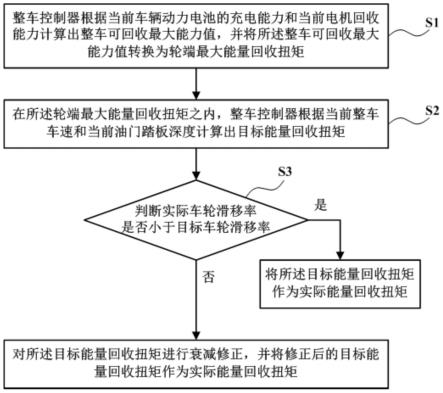
5.步骤s1,整车控制器根据当前车辆动力电池的充电能力和当前电机回收能力计算出整车可回收最大能力值,并将所述整车可回收最大能力值转换为轮端最大能量回收扭矩;
6.步骤s2,在所述轮端最大能量回收扭矩之内,整车控制器根据当前整车车速和当前油门踏板深度计算出目标能量回收扭矩;
7.步骤s3,制动控制器接收所述目标能量回收扭矩,并判断实际车轮滑移率与目标车轮滑移率的大小,若实际车轮滑移率低于目标车轮滑移率,则将所述目标能量回收扭矩作为实际能量回收扭矩,否则对所述目标能量回收扭矩进行衰减修正,并将修正后的目标能量回收扭矩作为实际能量回收扭矩。
8.进一步地,所述步骤s3中对所述目标能量回收扭矩进行衰减修正,具体为:修正后的目标能量回收扭矩=目标能量回收扭矩
×
λ,λ为修正系数,0<λ≤1,所述修正系数λ由制动控制器通过识别各种路面对应更改。
9.进一步地,当实际车轮滑移率大于目标车轮滑移率时,修正系数λ呈曲线逐渐减小,以使修正后的目标能量回收扭矩逐渐减小,实际车轮滑移率变小到低于目标车轮滑移率,当实际车轮滑移率从低于目标车轮滑移率变化到无滑移率时,修正系数λ呈曲线逐渐变大至1,整车控制器将接收的所述目标能量回收扭矩作为实际能量回收扭矩。
10.进一步地,所述步骤s1中,整车控制器根据当前车辆动力电池的充电能力和当前电机回收能力取小计算出整车可回收最大能力值。
11.进一步地,所述步骤s2中,整车控制器根据预置的当前整车车速、当前油门踏板深度和目标能量回收扭矩的对应关系表,通过查表方式查询得到与当前整车车速和当前油门踏板深度对应的目标能量回收扭矩。
12.进一步地,制动控制器采集车轮轮速传感器信号来计算基础的整车车速,当车辆有转向时,制动控制器利用方向盘转角信号、纵向和/或横向加速度信号、偏航率信号对基础的整车车速进行修正;当车辆直行时,则利用整车纵向加速度信号对基础的整车车速进行修正。
13.本发明实施例还提供一种车辆能量回收控制系统,包括:
14.整车控制器,用于根据当前车辆动力电池的充电能力和当前电机回收能力计算出整车可回收最大能力值,并将所述整车可回收最大能力值转换为轮端最大能量回收扭矩;以及在所述轮端最大能量回收扭矩之内,根据当前整车车速和当前油门踏板深度计算出目标能量回收扭矩;
15.制动控制器,用于接收所述目标能量回收扭矩,并判断实际车轮滑移率与目标车轮滑移率的大小,若实际车轮滑移率低于目标车轮滑移率,则将所述目标能量回收扭矩作为实际能量回收扭矩,否则对所述目标能量回收扭矩进行衰减修正,并将修正后的目标能量回收扭矩作为实际能量回收扭矩。
16.进一步地,所述制动控制器对所述目标能量回收扭矩进行衰减修正,具体为:修正后的目标能量回收扭矩=目标能量回收扭矩
×
λ,λ为修正系数,0<λ≤1,当实际车轮滑移率大于目标车轮滑移率时,修正系数λ呈曲线逐渐减小,以使修正后的目标能量回收扭矩逐渐减小,实际车轮滑移率变小到低于目标车轮滑移率,当实际车轮滑移率从低于目标车轮滑移率变化到无滑移率时,修正系数λ呈曲线逐渐变大至1,整车控制器将接收的所述目标能量回收扭矩作为实际能量回收扭矩。
17.进一步地,所述整车控制器根据预置的当前整车车速、当前油门踏板深度和目标能量回收扭矩的对应关系表,通过查表方式查询得到与当前整车车速和当前油门踏板深度对应的目标能量回收扭矩。
18.进一步地,所述制动控制器采集车轮轮速传感器信号来计算基础的整车车速,当车辆有转向时,所述制动控制器利用方向盘转角信号、纵向和/或横向加速度信号、偏航率信号对基础的整车车速进行修正;当车辆直行时,则利用整车纵向加速度信号对基础的整车车速进行修正。
19.实施本发明具有如下有益效果:在不增加硬件成本的情况下,通过对能量回收扭矩进行控制,提高车辆的续航里程,并保证在较高减速度的情况下车辆的安全性和舒适性,提升车辆的驾驶体验和品牌认知度;可用于新能源单轴和双轴回收,并可实现平台化。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1为本发明实施例一一种车辆能量回收控制方法的流程示意图。
22.图2是本发明实施例一中计算目标能量回收扭矩的示意图。
具体实施方式
23.以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
24.请参照图1所示,本发明实施例一提供一种车辆能量回收控制方法,包括:
25.步骤s1,整车控制器根据当前车辆动力电池的充电能力和当前电机回收能力计算出整车可回收最大能力值,并将所述整车可回收最大能力值转换为轮端最大能量回收扭矩;
26.步骤s2,在所述轮端最大能量回收扭矩之内,整车控制器根据当前整车车速和当前油门踏板深度计算出目标能量回收扭矩;
27.步骤s3,制动控制器接收所述目标能量回收扭矩,并判断实际车轮滑移率与目标车轮滑移率的大小,若实际车轮滑移率低于目标车轮滑移率,则将所述目标能量回收扭矩作为实际能量回收扭矩,否则对所述目标能量回收扭矩进行衰减修正,并将修正后的目标能量回收扭矩作为实际能量回收扭矩。
28.具体地,步骤s1中,整车控制器根据当前车辆动力电池的充电能力p1和当前电机回收能力p2取小计算出整车可回收最大能力值p,p1、p2、p均为功率;然后并通过公式p=t
×
n/9550将整车可回收最大能力值p转换成轮端最大能量回收扭矩。
29.步骤s2中,在步骤s1计算出的轮端最大能量回收扭矩之内,整车控制器会根据当前整车车速和当前油门踏板深度计算出符合驾驶员意图且具有驾驶性能的目标能量回收扭矩。如图2所示,横坐标为当前整车车速,纵坐标为目标能量回收扭矩,曲线显示了在不同的油门踏板深度下,目标能量回收扭矩随当前整车车速变化的关系,因此可以标定目标能量回收扭矩,在实际应用中,直接根据当前整车车车速和当前油门踏板深度找到对应的目标能量回收扭矩。可以理解的是,也可以在整车控制器内预置当前整车车速、当前油门踏板深度和目标能量回收扭矩的对应关系表,通过查表方式查询得到与当前整车车速和当前油门踏板深度对应的目标能量回收扭矩。
30.步骤s3中,制动控制器需要计算实际车轮滑移率μ,并设置用于触发修正目标能量回收扭矩的目标车轮滑移率。车轮滑移率μ系根据车轮轮速v
轮
和整车车速v
车
计算,具体计算公式如下:
[0031][0032]
进一步地,制动控制器首先采集车轮轮速传感器信号来计算基础的整车车速,当车辆有转向时,制动控制器利用方向盘转角信号、纵向和/或横向加速度信号、偏航率信号对基础的整车车速进行修正;而车辆直行时,则利用整车纵向加速度信号对基础的整车车速进行修正。
[0033]
制动控制器计算出实际车轮滑移率μ之后,将比较实际车轮滑移率与目标车轮滑移率的大小关系,然后根据比较结果确定实际能量回收扭矩。具体来说,如果实际车轮滑移率低于目标车轮滑移率,制动控制器将接收的目标能量回收扭矩作为实际能量回收扭矩发给电机实际执行,保证车辆的续航里程;如果实际车轮滑移率≥目标车轮滑移率,制动控制
器将修正衰减此目标能量回收扭矩,再发给电机实际执行,保证车辆的安全和舒适性能。具体的修正方式为:修正后的目标能量回收扭矩=目标能量回收扭矩
×
λ,λ为修正系数,其变化范围为:0<λ≤1。
[0034]
需要说明的是,λ是曲线变化的,不是阶跃变化,例如,整车从低于目标车轮滑移率的较大实际车轮滑移率变化到无滑移率时,λ呈曲线逐渐变大(非阶跃变大),保证车辆的实际回馈扭矩平滑性,车辆的平顺性得以保证。λ的实时变化可以使修正后的目标能量回收扭矩也不断变化,保证实际车轮滑移率低于目标车轮滑移率,使车辆处于一个安全状态。具体地,首先将目标车轮滑移率通过匹配输入,当实际车轮滑移率大于目标车轮滑移率时,将修正系数λ逐渐减小,即实际能量回收扭矩减小,轮速逐渐增大且恢复并接近于整车车速,实际车轮滑移率变小。此时,为了保证多能量回收扭矩,可以将修正系数λ逐渐增大,即实际能量回收扭矩增大,轮速趋于抱死并且低于整车车速,此时计算出的实际车轮滑移率又逼近目标车轮滑移率,如此往复。由此可知,本实施例能够对整车控制器发出的目标能量回收扭矩进行精准及时的修正,如果实际车轮滑移率≥目标车轮滑移率,能够在100ms内对目标能量回收扭矩修正,并且后续工作循环均可在100ms内实现实际车轮滑移率——目标能量回收扭矩的实时调整,整个过程的调节非常细腻,车辆的纵向加速度变化平稳,车辆减速度丢失削弱,驾乘舒适性得以提升,车辆转向不足性能提升,制动控制器马达工作噪音发生频率得以优化。
[0035]
还需说明的是,对于复杂路面,本实施例可以用同一目标车轮滑移率作为判断条件,对目标能量回收扭矩进行修正,此时只需要更改修正系数λ即可,即制动控制器通过识别各种路面,对应更改修正系数λ即可。通过设定目标车轮滑移率,λ自动呈曲线变化,导致实际能量回收扭矩自动变化,将实际车轮滑移率控制在小于目标车轮滑移率即可。
[0036]
相应于本发明实施例一的一种车辆能量回收控制方法,本发明实施例二还提供一种车辆能量回收控制系统,包括:
[0037]
整车控制器,用于根据当前车辆动力电池的充电能力和当前电机回收能力计算出整车可回收最大能力值,并将所述整车可回收最大能力值转换为轮端最大能量回收扭矩;以及在所述轮端最大能量回收扭矩之内,根据当前整车车速和当前油门踏板深度计算出目标能量回收扭矩;
[0038]
制动控制器,用于接收所述目标能量回收扭矩,并判断实际车轮滑移率与目标车轮滑移率的大小,若实际车轮滑移率低于目标车轮滑移率,则将所述目标能量回收扭矩作为实际能量回收扭矩,否则对所述目标能量回收扭矩进行衰减修正,并将修正后的目标能量回收扭矩作为实际能量回收扭矩。
[0039]
进一步地,所述制动控制器对所述目标能量回收扭矩进行衰减修正,具体为:修正后的目标能量回收扭矩=目标能量回收扭矩
×
λ,λ为修正系数,0<λ≤1。
[0040]
进一步地,当实际车轮滑移率大于目标车轮滑移率时,修正系数λ呈曲线逐渐减小,以使修正后的目标能量回收扭矩逐渐减小,实际车轮滑移率变小到低于目标车轮滑移率。
[0041]
进一步地,当实际车轮滑移率从低于目标车轮滑移率变化到无滑移率时,修正系数λ呈曲线逐渐变大至1,整车控制器将接收的所述目标能量回收扭矩作为实际能量回收扭矩。
[0042]
进一步地,所述整车控制器根据预置的当前整车车速、当前油门踏板深度和目标能量回收扭矩的对应关系表,通过查表方式查询得到与当前整车车速和当前油门踏板深度对应的目标能量回收扭矩。
[0043]
进一步地,所述制动控制器采集车轮轮速传感器信号来计算基础的整车车速,当车辆有转向时,所述制动控制器利用方向盘转角信号、纵向和/或横向加速度信号、偏航率信号对基础的整车车速进行修正;当车辆直行时,则利用整车纵向加速度信号对基础的整车车速进行修正。
[0044]
有关本实施例车辆能量回收控制系统的工作原理和过程,参见前述本发明实施例一的说明,此处不再赘述。
[0045]
通过上述说明可知,与现有技术相比,本发明的有益效果在于:在不增加硬件成本的情况下,通过对能量回收扭矩进行控制,提高车辆的续航里程,并保证在较高减速度的情况下车辆的安全性和舒适性,提升车辆的驾驶体验和品牌认知度;可用于新能源单轴和双轴回收,并可实现平台化。
[0046]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
