1.本发明属于遥控焊接技术领域,具体涉及一种用于核环境的管道遥控焊接返修方法。
背景技术:
2.随着核电站数量逐渐增多,随之而来对核后处理的返修装备需求也越来越多。在核电站中有大量的管道,在这种维修任务中,由于环境具有辐射剂量和气凝胶,操作员进入现场维修往往需要付出很大的健康代价,另一方面,由于焊接本身的工作环境对健康成本也较大,在恶劣焊接环境下的工作会导致整体成本增加。
3.因此,有必要提供一种用于核环境的管道遥控焊接返修方法解决上述技术问题。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有对远程焊接维修的需求,提供一种用于核环境的管道遥控焊接返修方法,能够完成核环境下的管道的遥控焊接任务,改善焊接工作环境,提高作业效率,保证焊接质量。
5.本发明解决其技术问题所采用的技术方案是:构造一种用于核环境的管道遥控焊接返修方法,包括空间鼠标、力操纵杆、人机交互界面显示屏、控制器及通讯总线、焊接工具,双臂机器人及移动机器人,所述方法由以下步骤实现:
6.步骤一:操作者在本地端通过控制器及通讯总线与工作端的vr立体视觉设备进行交互,佩戴所述vr立体视觉设备操作双臂机器人,全方面观察管道环境,确定待焊接修复位置,操作者通过vr立体视觉设备操作主手机器人大范围控制工具机器人移动,待工具机器人通过下方设置的agv小车移动到待焊接管道位置附近时,操作者操纵力操纵杆在小范围内逐步移动靠近管道,在到达管道裂纹附近后,操作空间鼠标在小范围内调整工具机器人位置,所述工具机器人准备开始修复。
7.步骤二:操作者在人机交互界面显示屏上给机器人发出开始修复指令,所述机器人自动更换视觉及力控传感设备检测待焊接修复管道位置,然后操作者操控力操纵杆进行返修夹具固定,并在自动更换为切割工具后,进行切管操作,随后机器人自动复位,切换抓取工具将管道放置废管后回到工作原点并更换打磨工具,随后操纵力操纵杆进行切口打磨操作,随后机器人自动复位并更换视觉及力控传感设备,并用打磨除尘工具对打磨部位清洗。
8.步骤三:清洗完成后,所述机器人从新管仓抓取新管道并放置固定在待焊部位,自动更换焊钳后,操作者操纵力操纵杆到焊接一位置,机器人自动开始焊接,焊接完成后,操纵机器人到焊接二位置进行自动焊接,焊接完成后,机器人自动更换视觉及力控传感设备,对管道焊接情况进行检测,操作员确认后,结束修复,机器人自动复位。
9.在本发明提供的一种用于核环境的管道遥控焊接返修方法中,所述工作端采用两种机器人系统完成核环境下的管道遥控焊接,分别是双臂机器人以及移动机器人。
10.在本发明提供的一种用于核环境的管道遥控焊接返修方法中,所述工作端的机器人系统采用的传感方式为视觉及力控传感设备,视觉检测工具,作用为待焊坡口面建模及特征信息获取、待焊管道的位置姿态测量以及缺陷的位置确定。
11.在本发明提供的一种用于核环境的管道遥控焊接返修方法中,所述方法的控制策略基于“宏观操控,局部自主”,操作员通过vr立体视觉设备实时监控双臂机器人和移动机器人,在完整的遥控焊接任务工作中,操作员负责待焊位置寻找及导引、工装固定、切割及打磨操作,机器人系统负责自动复位、切换工具、放置安装管道、焊接操作、焊接场景信息传感、修复情况检测工作。
12.在本发明提供的一种用于核环境的管道遥控焊接返修方法中,所述焊接工具为焊钳,对于管道替换焊接工具为改造后的闭口式焊钳,自动进行全位置tig管/管焊接,无需重复定位点焊,对于切除完整焊缝和局部返修的焊接工具为开口式焊钳,卡钳式装夹方式可对不同管径作任意调节,自熔、加丝焊接。
13.与相关技术相比较,本发明提供的一种用于核环境的管道遥控焊接返修方法具有如下有益效果:
14.本发明提供一种用于核环境的管道遥控焊接返修方法,通过在本地端操作力操纵杆、空间鼠标、主手机器人、vr手柄等多个输入设备,在工作端控制两种不同的机器人系统,整个系统具有很好的鲁棒性,可以很好的适应核环境下复杂的管道焊接场景,操作员可以切换各种输入设备远程控制机器人,从而可以很好的完成管道焊接任务。通过vr立体视觉为操作员提供高透明性的监控工具,通过双目视觉、线结构光传感器、力控传感等多种传感手段对焊接场景信息进行提取及建模,使得机器人可以自动完成焊接、切换工具等多种任务,大大减少了操作员的工作量,提高了系统的智能化程度。该方法基于“宏观遥控、局部自主”的控制策略,很好的对操作员和机器人进行了角色分工,使得人机协作更加和谐,覆盖焊前、焊中、焊后全过程,焊接效率大大提升,工作环境有效改善,焊接质量可靠。
附图说明
15.图1为本发明提供的一种用于核环境的管道遥控焊接返修方法的一种较佳实施例的结构示意图;
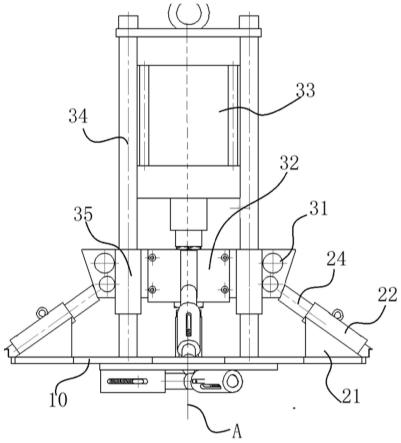
16.图2为本发明中用于遥操作完成管道替换和完整焊缝切除作业的双臂机器人的结构示意图;
17.图3为本发明中用于遥操作完成局部焊接修复作业的移动机器人的结构示意图。
18.图中标号:1、主手机器人;2、空间鼠标;3、力操纵杆;4、人机交互界面显示屏;5、vr立体视觉设备;6、控制器及通讯总线;7、双臂机器人;8、移动机器人;9、打磨除尘工具;10、返修夹具;11、视觉及力控传感设备;12、切割工具;13、焊钳;14、新管仓;15、机器人;16、agv小车;17、视觉检测工具;18、工具机器人;19、打磨工具;20、焊接工具。
具体实施方式
19.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的典型实施例。
20.实施例一:
21.如图1、图2所示,本发明的一种用于核环境的管道远程焊接方法,包括空间鼠标2、力操纵杆3、人机交互界面显示屏4、控制器及通讯总线6、焊接工具20,对于管道替换和完整焊缝切除作业,是由以下步骤实现的:
22.步骤一:操作者在本地端通过控制器及通讯总线6与工作端的vr立体视觉设备5进行交互,佩戴vr立体视觉设备5操作双臂机器人7,全方面观察管道环境,确定待焊接修复位置,操作者通过vr立体视觉设备5操作主手机器人1大范围控制工具机器人18移动,待工具机器人18通过下方设置的agv小车16移动到待焊接管道位置附近时,操作者操纵力操纵杆3在小范围内逐步移动靠近管道,在到达管道裂纹附近后,操作空间鼠标2在小范围内调整工具机器人18位置,工具机器人18准备开始修复。
23.步骤二:操作者在人机交互界面显示屏4上给机器人15发出开始修复指令,机器人15自动更换视觉及力控传感设备11检测待焊接修复管道位置,然后操作者操控力操纵杆3进行返修夹具10固定,并在自动更换为切割工具12后,进行切管操作,随后机器人15自动复位,切换抓取工具将管道放置废管后回到工作原点并更换打磨工具9,随后操纵力操纵杆3进行切口打磨操作,随后机器人15自动复位并更换视觉及力控传感设备11并用打磨除尘工具9对打磨部位清洗。
24.步骤三:清洗完成后,机器人15从新管仓14抓取新管道并放置固定在待焊部位,自动更换焊钳13后,操作者操纵力操纵杆3到焊接一位置,机器人15自动开始焊接,焊接完成后,操纵机器人15到焊接二位置进行自动焊接,焊接完成后,机器人15自动更换视觉及力控传感设备11,对管道焊接情况进行检测,操作员确认后,结束修复,机器人自动复位。
25.实施例二:
26.如图1、图3所示,本发明的一种用于核环境的管道远程焊接方法,对于局部管道焊接修复作业,是由以下步骤实现的:
27.步骤一:操作者佩戴vr立体视觉设备5操作移动机器人8,全方面观察管道环境,操纵力操纵杆3,控制agv小车16移动巡视管道环境,确定待焊接修复位置。随后操作主手机器人1,大范围控制工具机器人18移动,并调节工具机器人18位置以适应局部管道环境,避免碰撞。待工具机器人18移动到待焊接管道位置附近时,操纵力操纵杆3在小范围内逐步移动靠近管道,在到达管道裂纹附近后,操作空间鼠标2在小范围内调整工具机器人18位置,工具机器人18准备开始修复。
28.步骤二:操作者在人机交互界面4上发出开始修复指令,工具机器人18自动更换视觉检测工具17检测待焊接修复管道位置,并自动更换打磨工具19,随后操纵力操纵杆3进行局部打磨操作,随后工具机器人18自动复位并更换视觉检测设备17,对打磨情况进行自动检测。
29.步骤三:检测合格后,工具机器人18自动更换焊接工具20后,操作者操纵力操纵杆3到焊接位置,工具机器人18自动开始焊接,焊接完成后,操纵工具机器人18自动更换视觉检测工具17,对管道焊接情况进行检测。操作员确认后,结束修复,机器人自动复位。
30.本发明提供的一种用于核环境的管道远程焊接方法的工作原理如下:
31.本发明中操作者在本地端佩戴vr立体视觉设备5获取工作端焊接场景信息,通过操纵主手机器人1、空间鼠标2、力操纵杆3多种不同的输入设备,控制两种机器人系统对不同管道作业场景进行遥控焊接。在工作端,针对复杂的管道作业场景及任务需要,采用双臂
机器人7进行大规模的管道替换及焊接工作,采用移动机器人8进行局部的焊接修复工作,基于“宏观遥控,局部自主”的控制策略,将视觉及力控传感设备11、视觉检测工具17多种传感方式与机器人系统结合,机器人系统对焊接场景信息及特征建模能力大大提高,很大程度上提高了机器人系统自动化、智能化程度,由机器人系统完成更换工具,目标检测及特征建模,管道焊接任务,操作员遥操作负责简单的切割,打磨操作,并实时监督机器人系统工作,大大减少了操作员的工作量,实现了高鲁棒性、高融合性的人机协作,实现了较好的焊接质量及较高的焊接效率。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。