1.本发明涉及农业技术领域,具体为一种病虫害监测装置及其远程监测系统及其监测方法。
背景技术:
2.农业遥感系指利用遥感技术进行农业资源调查,土地利用现状分析,农业病虫害监测,农作物估产等农业应用的综合技术,可通过获取农作物影像数据,包括其农作物生长情况、预报预测农作物病虫害,它是将遥感技术与农学各学科及其技术结合起来,为农业发展服务的一门综合性很强的技术,主要包括利用遥感技术进行土地资源的调查,土地利用现状的调查与分析,农作物长势的监测与分析,病虫害的预测,以及农作物的估产等,是当前遥感应用的最大用户之一,现有技术领域内,农作物遥感基本原理是遥感影像的红波段和近红外波段的反射率及其组合与作物的叶面积指数、太阳光合有效辐射、生物量具有较好的相关性,通过无人机传感器记录的农作物表面信息,辨别作物类型,建立不同条件下的产量预报模型,集成农学知识和遥感观测数据,实现作物产量的遥感监测预报,通过各大终端产品定期获取专题信息产品监测与服务报告,同时又避免手工方法收集数据费时费力且具有某种破坏性的缺陷,由于无人机自身巡航范围受电量限制导致其监测范围有限,并且无人机只能在高空进行拍摄,无法贴近地面监测农作物根虫害情况,导致对病虫害数据收集存在限制。
技术实现要素:
3.本发明的目的在于提供一种病虫害监测装置及其远程监测系统及其监测方法,以至少解决现有技术的无人机自身巡航范围受电量限制导致其监测范围有限,并且无人机只能在高空进行拍摄,无法贴近地面监测农作物根虫害情况,导致对病虫害数据收集存在限制的问题。
4.为实现上述目的,本发明提供如下技术方案:一种病虫害监测装置及其远程监测系统,包括:
5.外壳;
6.充电舱,内嵌在所述外壳的顶端中心位置;
7.无人机,可收纳在所述充电舱的内侧;
8.投放机构,安装在所述无人机的底端;
9.控制模块,内嵌在所述外壳的前侧,所述控制模块和无人机远程网络连接;
10.升降模块,安装在所述外壳的底端,所述升降模块和控制模块电性连接;
11.驱动模块,设置在所述升降模块的升降端,所述驱动模块和控制模块电性连接;
12.避障模块,设置在所述外壳的顶端右侧,所述避障模块和控制模块电性连接;
13.光伏电池模块,设置在所述外壳的顶端左侧,所述光伏电池模块和控制模块电性连接。
14.优选的,所述投放机构包括;投放机构外壳、转动模块、方向调节器、夹持器和分体组件;投放机构外壳设置在所述无人机的底端,所述投放机构外壳的内腔底端与外部贯通;转动模块设置在所述投放机构外壳的内腔顶端,所述转动模块和无人机电性连接;所述方向调节器的数量为若干个,若干个所述方向调节器分别安装在转动模块的转动端,所述方向调节器和无人机电性连接;所述夹持器的数量为若干个,若干个所述夹持器分别安装在若干个方向调节器的转动端,所述夹持器和无人机电性连接;所述分体组件的数量为若干个,若干个所述分体组件分别可拆卸的设置在若干个夹持器的内侧。
15.优选的,所述分体组件包括;分体组件外壳、监测单元、绕流稳定板、升降座、第一电推杆、阻力板和连接杆;分体组件外壳沿上下方向被夹持在夹持器的内侧;监测单元设置在所述分体组件外壳的底端;所述绕流稳定板的数量为若干个,若干个所述绕流稳定板分别沿周向间隔设置在分体组件外壳的外壁;升降座插接在所述分体组件外壳的顶端开口处;第一电推杆设置在所述分体组件外壳的内腔,所述第一电推杆的伸缩端与升降座的底端固定连接,所述第一电推杆和无人机远程网络连接;所述阻力板的数量为四个,四个所述阻力板分别沿周向间隔九十度铰接在分体组件外壳的顶端;所述连接杆的数量为四个,四个所述连接杆一端分别沿周向间隔九十度通过销轴转动连接在升降座的外侧,四个所述连接杆的另一端分别与四个阻力板的顶端通过销轴转动连接。
16.优选的,所述分体组件还包括;环形外壳、气囊垫、微型气泵和传感器;环形外壳沿周向设置在所述监测单元的底端外侧;气囊垫沿周向设置在所述环形外壳的外侧;微型气泵内嵌在所述环形外壳的内侧,所述微型气泵和气囊垫相连接,所述微型气泵和无人机远程网络连接;传感器内嵌在所述环形外壳的内侧且位于微型气泵的外侧,所述传感器和无人机远程网络连接。
17.优选的,所述监测单元包括;监测单元筒体、微型电推杆、电磁板、监测机器人、收纳槽和电动密封门;监测单元筒体沿上下方向设置在所述分体组件外壳的底端,所述监测单元筒体的内腔底端与外部相贯通;所述微型电推杆的数量为两个,两个所述微型电推杆分别沿上下方向设置在监测单元筒体的内腔左右两侧,所述微型电推杆和无人机远程网络连接;电磁板设置在所述微型电推杆的伸缩端,所述电磁板和无人机远程网络连接;监测机器人设置在所述电磁板的上方,所述监测机器人可与电磁板磁性相吸,所述监测机器人和无人机远程网络连接;所述收纳槽的数量为三个,三个所述收纳槽分别沿周向间隔一百二十度开设在监测单元筒体的侧壁底端;所述电动密封门的数量为三个,三个所述电动密封门分别设置在三个收纳槽的外侧,所述电动密封门和无人机远程网络连接;其中,三个所述收纳槽的内腔均设置有位置矫正部件。
18.优选的,所述位置矫正部件包括;方位转动器、角度调节器、连接座、第一支撑杆、第一微型电动伸缩杆、第二支撑杆、支撑板和第二微型电动伸缩杆;方位转动器内嵌在所述收纳槽的内腔,所述方位转动器和无人机远程网络连接;角度调节器设置在所述方位转动器的转动端,所述角度调节器和无人机远程网络连接;连接座安装在所述角度调节器的移动端;第一支撑杆沿上下方向通过销轴转动连接在所述连接座的外侧底端;第一微型电动伸缩杆一端通过销轴转动连接在所述连接座的外侧顶端,所述第一微型电动伸缩杆和第一支撑杆的内侧通过销轴转动连接,所述第一微型电动伸缩杆和无人机远程网络连接;第二支撑杆沿上下方向通过销轴转动连接在所述第一支撑杆的另一端;支撑板设置在所述第二
支撑杆的底端;第二微型电动伸缩杆一端通过销轴转动连接在所述第一支撑杆的内侧,所述监测机器人的另一端和第二支撑杆的内侧通过销轴转动连接,所述第二微型电动伸缩杆和无人机远程网络连接。
19.上述装置的使用方法,包括以下步骤:
20.步骤一:使用时,工作人员远程控制控制模块启动避障模块、升降模块、驱动模块、充电舱和无人机依次启动,避障模块对外部环境和障碍物进行监测,升降模块调整外壳所在位置高度以避免压倒苗种,驱动模块驱动外壳沿指定路线进行行驶,充电舱内部电动门开启解除对充电舱内腔密封,无人机带动投放机构沿指定监测路线进行行驶,实现病虫害的空中大范围监测;
21.步骤二:工作人员远程控制控制模块通过无人机依次启动转动模块、方向调节器、夹持器,转动模块驱动方向调节器在夹持器的配合下带动分体组件转动至指定位置,方向调节器在夹持器的配合下调整分体组件的投送角度方向,夹持器解除对分体组件的夹持固定,以使分体组件在重力作用下向下空投,进而可实现多个监测设备投放在不同位置,以增大地面监测面积;
22.步骤三:工作人员远程控制控制模块通过无人机依次启动第一电推杆、传感器、微型气泵、方向调节器、夹持器,第一电推杆通过自身缩短带动升降座向下移动,进而使升降座在连接杆的配合下驱动阻力板以与分体组件外壳铰接处为顶点向外侧转动,增大阻力面积使分体组件在空降过程中起到减速作用,并使绕流稳定板起到稳定作用,传感器对高度和分体组件的水平方向进行监测,当分体组件移动至快接触地面高度时,微型气泵向气囊垫内部进行充气,以使气囊垫在落地过程中起到缓冲作用,传感器监测到分体组件的位置倾倒时向控制模块内部发送信号,使控制模块通过无人机依次启动对应位置矫正部件上的电动密封门、方位转动器、角度调节器、第一微型电动伸缩杆和第二微型电动伸缩杆,电动密封门开启解除对收纳槽内腔封闭,方位转动器调整角度调节器位置方向角度调节器调整连接座角度和倾斜方向,第一微型电动伸缩杆通过自身伸长缩短驱动第一支撑杆以与连接座销轴转动连接处为顶点转动,第二微型电动伸缩杆通过自身伸长缩短驱动第二支撑杆以与第一支撑杆销轴转动连接处为顶点转动,进而使第二支撑杆带动支撑板与地面接触起到支撑作用,工作人员控制控制模块通过无人机依次启动微型电推杆、电磁板和监测机器人,微型电推杆通过自身伸长推动电磁板向下移动以带动监测机器人伸出至监测单元筒体内腔,电磁板解除对监测机器人的固定,监测机器人移动至外部以对外部农作物贴近地面的根部进行监测
23.与现有技术相比,本发明的有益效果是:该病虫害监测装置及其远程监测系统及其监测方法:
24.1、通过避障模块对外部环境和障碍物进行监测,升降模块调整外壳所在位置高度以避免压倒苗种,驱动模块驱动外壳沿指定路线进行行驶,充电舱内部电动门开启解除对充电舱内腔密封,无人机带动投放机构沿指定监测路线进行行驶,实现病虫害的空中大范围监测;
25.2、通过转动模块驱动方向调节器在夹持器的配合下带动分体组件转动至指定位置,方向调节器在夹持器的配合下调整分体组件的投送角度方向,夹持器解除对分体组件的夹持固定,以使分体组件在重力作用下向下空投,进而可实现多个监测设备投放在不同
位置,以增大地面监测面积;
26.3、通过第一电推杆缩短带动升降座向下移动,进而使升降座在连接杆的配合下驱动阻力板以与分体组件外壳铰接处为顶点向外侧转动,增大阻力面积使分体组件在空降过程中起到减速作用,并使绕流稳定板起到稳定作用,传感器对高度和分体组件的水平方向进行监测,当分体组件移动至快接触地面高度时,微型气泵向气囊垫内部进行充气,以使气囊垫在落地过程中起到缓冲作用,传感器监测到分体组件的位置倾倒时向控制模块内部发送信号,电动密封门开启解除对收纳槽内腔封闭,方位转动器调整角度调节器位置方向角度调节器调整连接座角度和倾斜方向,第一微型电动伸缩杆通过自身伸长缩短驱动第一支撑杆以与连接座销轴转动连接处为顶点转动,第二微型电动伸缩杆通过自身伸长缩短驱动第二支撑杆以与第一支撑杆销轴转动连接处为顶点转动,进而使第二支撑杆带动支撑板与地面接触起到支撑作用,微型电推杆自身伸长推动电磁板向下移动以带动监测机器人伸出至监测单元筒体内腔,电磁板解除对监测机器人的固定,监测机器人移动至外部以对外部农作物贴近地面的根部进行监测;
27.从而可实现无人机与地面监测机器人一体化对农作物虫害进行监测,提高对农作物监测范围,并且可实现高空进行拍摄与地面监测结合,对农作物根虫害情况进行监测和数据收据,对农作物病虫害监测更加准确。
附图说明
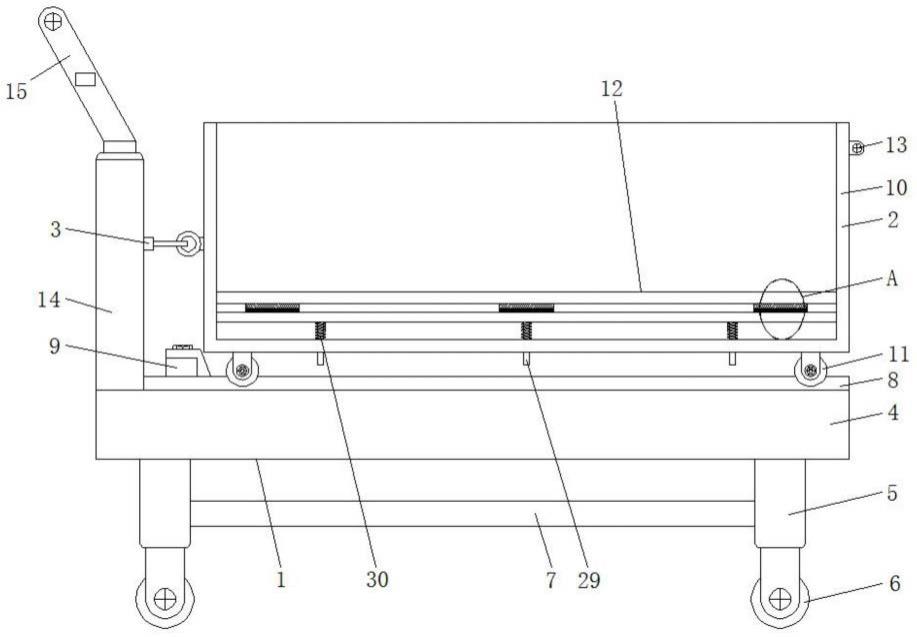
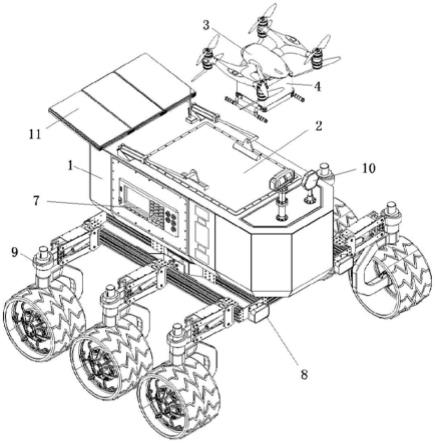
28.图1为本发明的结构示意图;
29.图2为图1的投放机构爆炸图;
30.图3为图2的分体组件爆炸图;
31.图4为图3的监测单元爆炸图。
32.图中:1、外壳,2、充电舱,3、无人机,4、投放机构,41、投放机构外壳,42、转动模块,43、方向调节器,44、夹持器,5、分体组件,51、分体组件外壳,52、绕流稳定板,53、升降座,54、第一电推杆,55、阻力板,56、连接杆,57、环形外壳,59、气囊垫,510、微型气泵,511、传感器,6、监测单元,61、监测单元筒体,62、微型电推杆,63、电磁板,64、监测机器人,65、收纳槽,66、电动密封门,67、方位转动器,68、角度调节器,69、连接座,610、第一支撑杆,611、第一微型电动伸缩杆,612、第二支撑杆,613、支撑板,614、第二微型电动伸缩杆,7、控制模块,8、升降模块,9、驱动模块,10、避障模块,11、光伏电池模块。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.请参阅图1-4,本发明提供一种技术方案:一种病虫害监测装置及其远程监测系统,包括:外壳1、充电舱2、无人机3、投放机构4、控制模块7、升降模块8、驱动模块9、避障模块10和光伏电池模块11;充电舱2内嵌在外壳1的顶端中心位置,充电舱2可由控制模块7进行控制以对无人机3进行充电,充电舱2顶部带有电动门起到密封防护作用;无人机3可收纳
在充电舱2的内侧,无人机3内部设置有网络模块可由工作人员通过网络终端远程进行控制,无人机3可起到投放机构4内部装置电器件和控制模块7控制信号中继器使用并可对投放机构4内部电器件进行供电;投放机构4安装在无人机3的底端;控制模块7内嵌在外壳1的前侧,控制模块7和无人机3远程网络连接,控制模块7内部设置有网络模块可由工作人员通过网络终端远程进行控制;升降模块8安装在外壳1的底端,升降模块8和控制模块7电性连接,升降模块8可由控制模块7控制升降调整外壳1所在位置高度以避免压倒苗种;驱动模块9设置在升降模块8的升降端,驱动模块9和控制模块7电性连接,驱动模块9可由控制模块7控制驱动外壳1沿指定路线进行行驶;避障模块10设置在外壳1的顶端右侧,避障模块10和控制模块7电性连接;光伏电池模块11设置在外壳1的顶端左侧,光伏电池模块11和控制模块7电性连接,光伏电池模块11可为充电舱2、驱动模块9、避障模块10和控制模块7供电。
35.作为优选方案,更进一步的,投放机构4包括;投放机构外壳41、转动模块42、方向调节器43、夹持器44和分体组件5;投放机构外壳41设置在无人机3的底端,投放机构外壳41的内腔底端与外部贯通;转动模块42设置在投放机构外壳41的内腔顶端,转动模块42和无人机3电性连接,转动模块42可由控制模块7通过无人机3控制驱动方向调节器43在夹持器44的配合下带动分体组件5转动至指定位置;方向调节器43的数量为若干个,若干个方向调节器43分别安装在转动模块42的转动端,方向调节器43和无人机3电性连接,方向调节器43可由控制模块7通过无人机3控制在夹持器44的配合下调整分体组件5的投送角度方向;夹持器44的数量为若干个,若干个夹持器44分别安装在若干个方向调节器43的转动端,夹持器44和无人机3电性连接,夹持器44可由控制模块7通过无人机3控制对分体组件5夹持固定;分体组件5的数量为若干个,若干个分体组件5分别可拆卸的设置在若干个夹持器44的内侧。
36.作为优选方案,更进一步的,分体组件5包括;分体组件外壳51、监测单元6、绕流稳定板52、升降座53、第一电推杆54、阻力板55、连接杆56、环形外壳57、气囊垫59、微型气泵510和传感器511;分体组件外壳51沿上下方向被夹持在夹持器44的内侧;监测单元6设置在分体组件外壳51的底端;绕流稳定板52的数量为若干个,若干个绕流稳定板52分别沿周向间隔设置在分体组件外壳51的外壁;升降座53插接在分体组件外壳51的顶端开口处;第一电推杆54设置在分体组件外壳51的内腔,第一电推杆54的伸缩端与升降座53的底端固定连接,第一电推杆54和无人机3远程网络连接,第一电推杆54可由控制模块7通过无人机3控制伸长缩短;阻力板55的数量为四个,四个阻力板55分别沿周向间隔九十度铰接在分体组件外壳51的顶端,阻力板55的内径呈弧形并与分体组件外壳51外壁适配;连接杆56的数量为四个,四个连接杆56一端分别沿周向间隔九十度通过销轴转动连接在升降座53的外侧,四个连接杆56的另一端分别与四个阻力板55的顶端通过销轴转动连接;环形外壳57沿周向设置在监测单元6的底端外侧;气囊垫59沿周向设置在环形外壳57的外侧;微型气泵510内嵌在环形外壳57的内侧,微型气泵510和气囊垫59相连接,微型气泵510和无人机3远程网络连接,微型气泵510可由控制模块7通过无人机3控制向气囊垫59内部进行充气,以使气囊垫59在落地过程中起到缓冲作用;传感器511内嵌在环形外壳57的内侧且位于微型气泵510的外侧,传感器511和无人机3远程网络连接,传感器511和无人机3电性连接,方向调节器43对分体组件5的高度和水平方向进行监测向控制模块7内部发送信号。
37.作为优选方案,更进一步的,监测单元6包括;监测单元筒体61、微型电推杆62、电
磁板63、监测机器人64、收纳槽65和电动密封门66;监测单元筒体61沿上下方向设置在分体组件外壳51的底端,监测单元筒体61的内腔底端与外部相贯通;微型电推杆62的数量为两个,两个微型电推杆62分别沿上下方向设置在监测单元筒体61的内腔左右两侧,微型电推杆62和无人机3远程网络连接,微型电推杆62可由控制模块7通过无人机3控制伸长缩短;电磁板63设置在微型电推杆62的伸缩端,电磁板63和无人机3远程网络连接,电磁板63可由控制模块7通过无人机3控制与监测机器人64磁吸固定;监测机器人64设置在电磁板63的上方,监测机器人64可与电磁板63磁性相吸,监测机器人64和无人机3远程网络连接,监测机器人64可由控制模块7通过无人机3控制,监测机器人64对农作物根部进行监测,监测机器人64自身可进行折叠;收纳槽65的数量为三个,三个收纳槽65分别沿周向间隔一百二十度开设在监测单元筒体61的侧壁底端;电动密封门66的数量为三个,三个电动密封门66分别设置在三个收纳槽65的外侧,电动密封门66和无人机3远程网络连接,电动密封门66可由控制模块7通过无人机3控制开启关闭;其中,三个收纳槽65的内腔均设置有位置矫正部件,位置矫正部件包括;方位转动器67、角度调节器68、连接座69、第一支撑杆610、第一微型电动伸缩杆611、第二支撑杆612、支撑板613和第二微型电动伸缩杆614;方位转动器67内嵌在收纳槽65的内腔,方位转动器67和无人机3远程网络连接,方位转动器67可由控制模块7通过无人机3控制调整角度调节器68位置方向;角度调节器68设置在方位转动器67的转动端,角度调节器68和无人机3远程网络连接,角度调节器68可由控制模块7通过无人机3控制调整连接座69角度和倾斜方向;连接座69安装在角度调节器68的移动端;第一支撑杆610沿上下方向通过销轴转动连接在连接座69的外侧底端;第一微型电动伸缩杆611一端通过销轴转动连接在连接座69的外侧顶端,第一微型电动伸缩杆611和第一支撑杆610的内侧通过销轴转动连接,第一微型电动伸缩杆611和无人机3远程网络连接,第一微型电动伸缩杆611可由控制模块7通过无人机3控制伸长缩短驱动第一支撑杆610以与连接座69销轴转动连接处为顶点转动;第二支撑杆612沿上下方向通过销轴转动连接在第一支撑杆610的另一端;支撑板613设置在第二支撑杆612的底端;第二微型电动伸缩杆614一端通过销轴转动连接在第一支撑杆610的内侧,监测机器人64的另一端和第二支撑杆612的内侧通过销轴转动连接,第二微型电动伸缩杆614和无人机3远程网络连接,第一微型电动伸缩杆611可由控制模块7通过无人机3控制伸长缩短驱动第二支撑杆612以与第一支撑杆610销轴转动连接处为顶点转动。
38.一种病虫害监测装置及其远程监测系统及其监测方法,包括以下步骤:
39.步骤一:使用时,工作人员远程控制控制模块7启动避障模块10、升降模块8、驱动模块9、充电舱2和无人机3依次启动,避障模块10对外部环境和障碍物进行监测,升降模块8调整外壳1所在位置高度以避免压倒苗种,驱动模块9驱动外壳1沿指定路线进行行驶,充电舱2内部电动门开启解除对充电舱2内腔密封,无人机3带动投放机构4沿指定监测路线进行行驶,实现病虫害的空中大范围监测;
40.步骤二:工作人员远程控制控制模块7通过无人机3依次启动转动模块42、方向调节器43、夹持器44,转动模块42驱动方向调节器43在夹持器44的配合下带动分体组件5转动至指定位置,方向调节器43在夹持器44的配合下调整分体组件5的投送角度方向,夹持器44解除对分体组件5的夹持固定,以使分体组件5在重力作用下向下空投,进而可实现多个监测设备投放在不同位置,以增大地面监测面积;
41.步骤三:工作人员远程控制控制模块7通过无人机3依次启动第一电推杆54、传感器511、微型气泵510、方向调节器43、夹持器44,第一电推杆54通过自身缩短带动升降座53向下移动,进而使升降座53在连接杆56的配合下驱动阻力板55以与分体组件外壳51铰接处为顶点向外侧转动,增大阻力面积使分体组件5在空降过程中起到减速作用,并使绕流稳定板52起到稳定作用,传感器511对分体组件5的高度和水平方向进行监测,当分体组件5移动至快接触地面高度时,微型气泵510向气囊垫59内部进行充气,以使气囊垫59在落地过程中起到缓冲作用,传感器511监测到分体组件5的位置倾倒时向控制模块7内部发送信号,使控制模块7通过无人机3依次启动对应位置矫正部件上的电动密封门66、方位转动器67、角度调节器68、第一微型电动伸缩杆611和第二微型电动伸缩杆614,电动密封门66开启解除对收纳槽65内腔封闭,方位转动器67调整角度调节器68位置方向,角度调节器68调整连接座69角度和倾斜方向,第一微型电动伸缩杆611通过自身伸长缩短驱动第一支撑杆610以与连接座69销轴转动连接处为顶点转动,第二微型电动伸缩杆614通过自身伸长缩短驱动第二支撑杆612以与第一支撑杆610销轴转动连接处为顶点转动,进而使第二支撑杆612带动支撑板613与地面接触起到支撑作用,工作人员控制控制模块7通过无人机3依次启动微型电推杆62、电磁板63和监测机器人64,微型电推杆62通过自身伸长推动电磁板63向下移动以带动监测机器人64伸出至监测单元筒体61内腔,电磁板63解除对监测机器人64的固定,监测机器人64移动至外部以对外部农作物贴近地面的根部进行监测。
42.通过本领域人员,可将本案中所有电气件与外部适配的电源通过导线进行连接,并且应该根据具体实际使用情况,选择相适配的外部控制器进行连接,以满足对所有电器件的控制需求,其具体连接方式以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,不再进行说明。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。