1.本发明涉及一种车辆转向系统和一种用于运行车辆转向系统的方法。该车辆可以是机动车且尤其是乘用车或载货车。车辆转向系统(本文中也仅简称为转向系统)优选是机电的。
背景技术:
2.典型地,用于机动车的机电转向装置包括控制器和电伺服马达,其中,控制器根据输入量计算出用于伺服马达的支持力矩和复位力矩。输入量例如是在转向把手处的手动转矩和车辆速度。也可设置有基于角度的输入量,如本文中还将阐释的那样。另外的输入量例如可以是温度,以便补偿转向装置的摩擦。典型地如此产生复位力矩,使得转向装置在不存在手动力矩的情况下复位到中间位置或者中立位置中。
3.也已知的是,设置有驾驶员辅助功能,其可以独立于驾驶员预设(即自主于驾驶员地或换言之自动地)操纵转向系统,并且更准确地说产生用于转向角度调整的参量和/或信号。为了获得转向角度调整,可基于这些参量或者信号操控伺服马达。
4.驾驶员辅助功能的一个示例是车道保持功能亦或车道保持辅助。该车道保持辅助设立成使车辆通过合适的转向角度适配在公差范围内沿着理论行驶车道保持。针对该驾驶员辅助功能经常使用位置调节的方式,其中,位置一般也可被理解为角度位置。在该位置调节的范畴内,将由驾驶员辅助功能为了车道保持的目的而预设的理论转向角度与实际转向角度进行比较,并且通过利用伺服马达施加合适的转向力矩来调整当前的角度差。
5.如果驾驶员想要并行于激活的驾驶员辅助功能预设或换言之施加驾驶员产生的手动转向力矩或驾驶员转向角度,则驾驶员通常必须过度转向由驾驶员辅助功能产生的转向力矩。换言之,驾驶员将该转向力矩(即通常位置调节器的输出)感觉为在转向把手处的极大影响转向感受的反力矩。该转向感受可与预期的和/或对于驾驶情况而言适当的转向感受显著区别,这出于舒适性原因和安全性原因是非期望的。
6.de 10 2014 226 781 a1公开了为了改善转向感受,从一开始就适合地适配相应的位置调节器的理论预设。
技术实现要素:
7.本发明的目的是尽管驾驶员辅助功能激活仍提供一种用于调整从驾驶员的角度适当的转向感受的备选的可能性。
8.该目的通过所附的独立权利要求的内容来实现。有利的改进方案在从属权利要求中说明。不言而喻的是,上面阐释和改进方案也适用于该解决方案或者可在其中设置。
9.一般认识到,一种用于适合地调整转向感受的可能性在于,在驾驶员转向期望(即变化的和/或不等于零的驾驶员转向角度)记录的情况下主动产生复位力矩,尤其独立于驾驶员辅助功能产生。该复位力矩可作用于转向把手并例如相反于通过驾驶员的偏转方向起作用。其即可以是逆着驾驶员期望起作用的力矩,该力矩从驾驶员的角度极大影响转向感
受并尤其可在触觉上感知为转向阻力或者反力矩。
10.尤其地,那么可至少部分地、极大地或完全地操控伺服马达,以便产生相应的复位力矩。然而,不再可以或至少不可以以相同的权重通过驾驶员辅助功能及其可能的位置调节器操控伺服马达。因此,驾驶员辅助功能对转向感受的影响可被限制或也可被完全抑制。
11.总的来说,即可设置成,在驾驶员辅助功能激活和驾驶员转向期望记录(例如通过观察变化的驾驶员转向角度)的情况下,变换和/或切换伺服马达的操控,亦即变换和/或切换成通过其它的另外的功能的操控。
12.更准确地说,复位力矩可通过独立于驾驶员辅助功能的另外的功能来产生(至少间接通过伺服马达的相应操控)。该功能一般可被称为舒适性功能。原则上,其可以是任何潜在影响转向感受的功能。一般地,该功能(但还有驾驶员辅助功能)可产生控制信号,以便适合地运行伺服马达以获得期望的效果(即提供复位力矩或调整辅助转向角度)。倘若本文中提到复位力矩通过另外的功能的产生,则不言而喻的是,由此也可指通过伺服马达的适合操控的仅间接的产生。
13.另外的功能、但还有驾驶员辅助功能可在控制器中实现和/或可通过控制器来实施或由该控制器包括。它们可实现为软件模块和/或软件组成部分。这些功能可储存在控制器的存储设备中。控制器可包括至少一个处理器,以便实施软件模块/软件组成部分。控制器可输出用于伺服马达的控制信号并例如在与伺服马达连接的can总线中馈送其。
14.通过将伺服马达的操控从驾驶员辅助功能切换到另外的功能上可产生符合情况的转向感受。如果将另外的功能操控伺服马达所基于的角度差确定为在驾驶员转向角度和辅助转向角度之间的差,那么这尤其适用。复位力矩那么尤其在其程度或数值方面按照该角度差来形成。更准确地说,复位力矩一般可借助(例如储存在另外的功能中的)特征线来产生,该特征线根据所获得的角度差限定应产生的复位力矩的值。
15.事实证明,以该方式可调整适配于驾驶情况的转向感受。与伺服马达力矩按照从其它角度差(在为了车道保持目的的理论转向角度与实际转向角度之间的差)出发的驾驶员辅助功能的产生相比,这尤其适用。
16.尤其地,提出了一种车辆转向系统,其具有:
‑ꢀ
至少一个伺服马达;
‑ꢀ
转向把手,借助该转向把手可由驾驶员预设期望的驾驶员转向角度(即待由转向系统调整或转换的转向角度);
‑ꢀ
控制器,该控制器具有驾驶员辅助功能,利用该驾驶员辅助功能可自主于驾驶员地预设用于操控伺服马达的辅助转向角度;并且该控制器具有至少一个另外的功能,利用该功能可按照获得的角度差(尤其在伺服马达处或通过伺服马达产生)预设复位力矩以减少角度差;其中,如果驾驶员在驾驶员辅助功能激活的情况下预设驾驶员转向角度,那么借助于另外的功能基于驾驶员转向角度和辅助转向角度(或在其之间)的角度差可预设和/或可产生复位力矩。尤其地,那么可将伺服马达的操控从驾驶员辅助功能变换到另外的功能上。
17.倘若本文中提到转向角度,则其可以是在车轮处调整的角度,例如相对于车辆纵轴线。以本身已知的方式,该转向角度可经由在伺服马达与车轮之间的已知的机械传动比
通过操控伺服马达精确地来调整。例如,伺服马达可作用于齿条,车轮与该齿条机械地联接且转向把手优选地也与该齿条机械地联接。
18.复位力矩可在转向把手处起作用和/或至少间接传递到该转向把手处。复位力矩一般可由伺服马达产生并经由与转向把手的机械联接传递到该转向把手处。转向把手那么例如可根据复位力矩来转动和/或作为可由驾驶员感知的反力矩起作用。术语“复位”在此是指应减少角度差,即与引起角度差的偏转相比,转向把手应被复位和/或被反向转动。尤其地,另外的功能可执行转向把手角度位置的调节,尤其以该方式,即角度差相对于理论位置进行平衡。
19.驾驶员可借助于转向把手例如机械地预设驾驶员转向角度。这可理解成转向把手与车轮机械地联接(例如经由齿条,伺服马达优选地也作用于该齿条)。按照所调整的驾驶员转向角度,那么可偏转齿条或其它机械部件并因此还可偏转车轮。
20.优选地,另外的功能是如下复位功能,其(例如原则上且尤其在驾驶员手动力矩和/或驾驶员转向期望消失的情况下)设立成将转向把手复位到预定的中立位置中,例如如果角度差相应于当前的转向把手角度相对于中立位置的差。这种复位功能是已知的。其一般可用于使转向把手返回典型地相应于直行驾驶的中立位置变得容易。
21.根据本发明,复位功能也可提供该效果,例如在驾驶员转向期望不记录的情况下的第一运行模式中。反之,第二运行模式可包括在驾驶员辅助功能由驾驶员过度转向的情况下复位力矩的所描述的产生。
22.不同于传统的复位功能,当前即可设置成,即使在驾驶员转向期望和/或驾驶员施加到转向把手上的驾驶员手动力矩存在的情况下也激活复位功能。然后,复位功能一般可基于相同的特征线和/或相同的调节或算法确定应产生的复位力矩和/或相应地操控伺服马达。但该复位力矩在所描述的新型运行情况下被产生并被用于调整期望的转向感受。
23.一种改进方案设置成,如果驾驶员在驾驶员辅助功能激活的情况下预设(即尤其相反于驾驶员辅助功能转向和/或尝试过度转向该驾驶员辅助功能)驾驶员转向角度,则可至少暂时中断伺服马达基于辅助转向角度的操控。如所描述的那样,伺服马达那么优选地可仅通过另外的功能来操控。这实现,转向感受可极大地或仅借助于该另外的功能调整。
24.根据一种另外的实施形式,驾驶员辅助功能包括位置调节器,该位置调节器设立成获得辅助转向角度作为理论预设并基于此操控伺服马达。尤其地,首先可确定理论-实际偏差,其中,获得当前的转向角度作为实际预设。以该方式,驾驶员辅助功能期望的转向角度可通过调节精确地来调整。通过那么但按需求变换成用于产生复位力矩的另外的功能的可能性,可调整从驾驶员的角度自然的转向感受。该转向感受有利地区别于在驾驶员相反于位置调节器反转向的情况下将感觉到的转向感受。
25.本发明还涉及一种车辆、尤其一种机动车且此外尤其涉及一种乘用车或载货车,其包括根据前述方面中任一项的车辆转向系统。
26.此外,本发明涉及一种用于运行车辆转向系统的方法,其中,车辆转向系统具有:
‑ꢀ
至少一个伺服马达,和
‑ꢀ
转向把手,借助该转向把手可由驾驶员预设期望的驾驶员转向角度;其中,该方法在自主于驾驶员地预设用于操控伺服马达的辅助转向角度的驾驶员辅助功能激活的情况下包括:
‑ꢀ
确定由驾驶员预设驾驶员转向角度;
‑ꢀ
确定驾驶员转向角度与辅助转向角度的角度差;
‑ꢀ
通过伺服马达基于角度差的操控产生复位力矩。
27.该方法可包括任何特征、任何步骤和任何改进方案,以便提供全部的本文中描述的效果、运行状态和相互作用。尤其地,对车辆转向系统的特征的全部的阐释和车辆转向系统的特征的改进方案也可适用于相同措辞的方法特征或在其中设置。一般,该方法可以利用根据任何本文中描述的方面的车辆转向系统来实施。尤其地,复位力矩可借助于本文中描述的形式的任何另外的功能来产生。
28.例如该方法可包括,在首先驾驶员辅助功能激活和驾驶员转向角度的预设确定的情况下结束和/或中断驾驶员辅助功能,以便备选地借助于另外的功能操控伺服马达。尤其地,伺服马达那么可从产生用于提供期望的驾驶员辅助功能的转向力矩被操控成产生用于提供期望的转向感受和/或用于减少所确定的角度差的转向力矩。概括来说,该方法的一种改进方案设置成,如果驾驶员在驾驶员辅助功能激活的情况下预设驾驶员转向角度,那么至少暂时中断伺服马达基于辅助转向角度的操控。
29.根据该方法的一种另外的实施形式,驾驶员辅助功能包括位置调节器,该位置调节器获得辅助转向角度作为理论预设并基于此操控伺服马达。
附图说明
30.接下来借助所附示意图阐释本发明的实施形式。
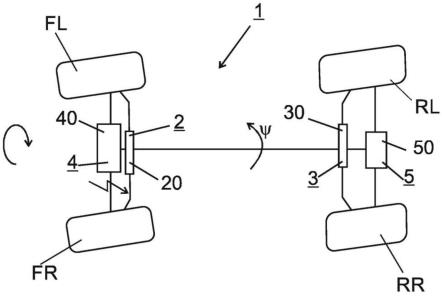
31.图1示出了根据一种实施形式的车辆转向系统的概览图,其中,车辆转向系统实施根据本发明的方法。
32.图2示出了由根据图1中的车辆转向系统实施的方法的流程图。
具体实施方式
33.在图1中示出了根据示意性视图的车辆转向系统10,其由否则未进一步呈现的车辆1包括。车辆转向系统包括以方向盘的形式的转向把手12。该转向把手经由转向杆14与齿条16联接,使得转向把手12的旋转可转换成齿条16的线性移动(在图1中从左向右)。
34.伺服马达18也经由极其简化呈现的机械联接20作用于齿条16。这也设立成将伺服马达18的输出轴的旋转转换成齿条16的线性移动。
35.齿条16与车辆1的前轴的两个车轮22机械地联接。以已知的方式如此进行该联接,使得齿条16的线性移动导致车轮22围绕在图1中竖直的轴线的旋转。以该方式,可调整车辆或车轮22的转向角度。
36.转向系统10还包括电子和/或数字运行的控制器24。作为一般性且不限于该实施例的细节的方面,该控制器24可以是一件式或多件式的。在多件式的情况下,控制器可以是如下单个控制器或单个控制部件的组件,其优选地相互通信并且可联合为上级控制器24或形成这样的上级控制器。
37.控制器24示例性地包括存储设备26和处理器设备28。处理器设备28设立成实施储存在存储设备26中的软件组成部分或软件功能。它们是驾驶员辅助功能32和另外的功能34(其在示出的示例中是复位功能)。
38.功能32,34中的两个设立成生成控制信号,所述控制信号可由控制器24借助于信号连接36(例如can总线)输出到恰恰该伺服马达处以操控伺服马达18。
39.控制器24和更准确地说驾驶员辅助功能32获得实际转向角度iw作为输入信号,该实际转向角度例如由未呈现的传感器通过至少间接检测车轮22的位置来确定。例如,传感器可检测齿条16的位置并基于已知的机械传动比那么可确定所占据的实际转向角度iw。
40.控制器24和更准确地说复位功能34获得驾驶员转向角度fw作为另外的输入信号。该驾驶员转向角度可借助于角度传感器来确定,该角度传感器确定转向把手12和/或转向杆14的角度位置。基于此且鉴于已知的机械传动比可再次推断出由车轮22占据的或预设的转向角度。
41.驾驶员辅助功能32设立成确定辅助转向角度aw。该辅助转向角度可用作理论预设,以便与实际转向角度iw一起确定用于由驾驶员辅助功能32包括的位置调节器的理论-实际偏差。如在一般性描述部分中阐述的那样,位置调节器那么可操控伺服马达18,以便减少该偏差。
42.基于获得或确定的角度差,复位功能34通过操控伺服马达18产生复位力矩,以便减少该角度差。该复位力矩可由驾驶员在转向把手12处感知为转向感受的组成部分。
43.在此以本身已知的方式,转向把手12相对于预定的中立位置的偏转可首先被确定为角度差。这在没有驾驶员转向期望的情况下的运行状态中进行。但也可在存在驾驶员转向期望的情况下由复位功能34提供接下来描述的附加的功能。
44.如在图1中示意性表示的那样,驾驶员辅助功能32可将辅助转向角度aw传送到复位功能34处。基于此,复位功能34而或其它的中间接入的单元可确定由辅助转向角度aw与驾驶员转向角度fw构成的差作为另外的角度差。该角度差被用于在下面描述的运行状态中借助于复位功能34产生复位力矩。
45.更准确地说,控制器24一般设立成确定驾驶员辅助功能32或复位功能34中的哪个操控伺服马达18以产生期望的转向力矩或复位力矩。
46.在当前情况下,除了在驾驶员的转向期望消失的情况下所偏转的转向把手12的由现有技术已知的复位之外,也当驾驶员在驾驶员辅助功能32激活的情况下表达相应的转向期望并预设或改变驾驶员转向角度fw时激活复位功能34。
47.然后,伺服马达18的操控从通过驾驶员辅助功能32的操控变换成通过复位功能34的操控。因此,驾驶员辅助功能32或伺服马达18通过驾驶员辅助功能32的操控被中断,并且取而代之变换成通过复位功能34基于所描述的由辅助转向角度aw和驾驶员转向角度fw构成的角度差的操控。
48.在前面描述的方法流程概括在图2的流程图中。在第一步骤s1中,激活驾驶员辅助功能32。该驾驶员辅助功能接着执行转向角度的调节,其中,驾驶员辅助功能优选地持续地确定辅助转向角度aw作为理论预设,以便保持预设的行驶车道。
49.在步骤s2中,由控制器24记录驾驶员转向期望并确定由驾驶员预设的驾驶员转向角度fw。
50.在步骤s3中,接着中断伺服马达18通过驾驶员辅助功能32的操控。取而代之,在步骤s4中激活复位功能34。在该步骤的范畴内或还在其之前或在其之后,确定由(例如当前的或最后输出的)辅助转向角度aw和驾驶员转向角度fw构成的角度差。该角度差由复位功能
34用于确定应施加的复位力矩。
51.在步骤s5中,由复位功能34操控伺服马达18,以便产生该复位力矩。
52.附图标记列表1 车辆10 车辆转向系统12 转向把手14 转向杆16 齿条18 伺服马达20 联接22 车轮24 控制器26 存储设备28 处理器设备32 驾驶员辅助功能33 位置调节器34 复位功能(另外的功能)36 信号连接fw 驾驶员转向角度iw 实际转向角度aw 辅助转向角度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。