1.本发明涉及机器人编程装置。
背景技术:
2.在通过机器人所具备的工具对工件进行加工时,需要事先示教机器人的动作。例如,专利文献1及2公开了一种编程装置,其对机器人的程序进行示教,该机器人具备对配置在作业空间内的工件进行加工的工具。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第5340455号公报
6.专利文献2:日本专利第4870831号公报
技术实现要素:
7.发明要解决的课题
8.在这样的编程装置中,例如,在根据动作图案生成涂布作业的程序时,为了以避开进行了遮蔽处理的部位并缩短循环时间的方式进行示教,作业者必须通过手动作业来修正动作图案的形状,示教作业需要较多的工时。因此,期望在机器人编程装置中削减示教作业所需的工时。
9.用于解决课题的手段
10.本公开的一种方式所涉及的机器人编程装置是对机器人的动作程序进行示教的机器人编程装置,该机器人具备对配置于作业空间内的工件进行加工的工具,所述机器人编程装置具备:虚拟空间生成部,其生成三维地表现所述作业空间的虚拟空间;模型配置部,其在所述虚拟空间内配置所述工件的工件模型、所述机器人的机器人模型以及所述工具的工具模型;加工部位指定部,其指定所述工件模型上的加工部位;立体形状配置部,其将所述立体形状配置于所述虚拟空间内,使得通过预定的动作图案填充预定的立体形状的面,并且将所述动作图案投影于所述工件模型的至少一个面;加工路径生成部,其将所述动作图案投影于所述工件模型的至少一个面来生成所述工具的加工路径;以及变更部,其基于所述加工部位来变更所述加工路径以及/或者所述动作程序。
11.发明效果
12.根据本发明,能够削减示教作业所需的工时。
附图说明
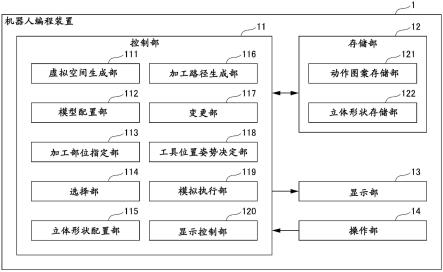
13.图1是表示本实施方式的机器人编程装置的结构的框图。
14.图2是表示虚拟空间内的工件模型、机器人模型以及工具模型的图。
15.图3是表示虚拟空间内的工件模型、机器人模型以及工具模型的图。
16.图4是表示虚拟空间内的工件模型、机器人模型以及工具模型的图。
17.图5是表示虚拟空间内的工件模型、机器人模型以及工具模型的图。
18.图6a是表示工件模型上的加工部位的指定的图。
19.图6b是表示工件模型上的非加工部位的指定的图。
20.图6c是表示工件模型上的非加工部位的指定的图。
21.图6d是表示工件模型上的非加工部位的指定的图。
22.图7是表示动作图案的例子的图。
23.图8是表示立体形状的例子的图。
24.图9是表示将立体形状配置于虚拟空间内的例子的图。
25.图10是表示生成工具的加工路径的例子的图。
26.图11是表示变更加工路径的例子的图。
27.图12是表示变更加工路径以及动作程序的例子的图。
28.图13是表示变更动作程序的例子的图。
29.图14是表示基于喷雾装置模型的涂布作业的例子的图。
30.图15是表示基于研磨装置模型的研磨作业的例子的图。
31.图16是表示涂布作业的模拟的例子的图。
32.图17是表示被涂布的工件模型的例子的图。
33.图18是表示涂布作业的模拟的例子的图。
34.图19是表示被涂布的工件模型的例子的图。
35.图20是表示机器人编程装置的处理的流程图。
具体实施方式
36.以下,对本发明的实施方式的一例进行说明。
37.图1是表示本实施方式的机器人编程装置的结构的框图。如图1所示,机器人编程装置1具备控制部11、存储部12、显示部13以及操作部14。
38.机器人编程装置1的目的在于,示教机器人的动作程序,该机器人具备对配置在作业空间内的工件进行加工的工具。
39.控制部11是cpu(central processing unit:中央处理单元)等处理器,通过执行存储于存储部12的程序来实现各种功能。
40.控制部11具备虚拟空间生成部111、模型配置部112、加工部位指定部113、选择部114、立体形状配置部115、加工路径生成部116、变更部117、工具位置姿势决定部118、模拟执行部119以及显示控制部120。
41.虚拟空间生成部111生成三维地表现了作业空间的虚拟空间。
42.模型配置部112在虚拟空间内配置工件的工件模型、机器人的机器人模型以及工具的工具模型。
43.加工部位指定部113指定工件模型上的加工部位。
44.选择部114选择存储在动作图案存储部121中的动作图案。此外,选择部114选择存储在立体形状存储部122中的立体形状。
45.立体形状配置部115将立体形状配置于虚拟空间,使得通过预定的动作图案填充预定的立体形状的面,并且将动作图案投影到工件模型的至少1个面。
46.加工路径生成部116将动作图案投影到工件模型的至少1个面来生成工具的加工路径。
47.变更部117根据加工部位来变更加工路径和/或动作程序。
48.工具位置姿势决定部118根据由加工路径生成部116生成的加工路径和工件模型的至少1个面的法线方向,自动地决定工具模型的位置或位置姿势。
49.模拟执行部119例如在工具模型为具备至少1个喷嘴的喷雾装置的喷雾装置模型的情况下,使用搭载有喷雾装置模型的机器人模型,基于动作程序,执行一边使喷雾装置模型移动一边将从喷嘴喷射的喷射物涂布于工件模型的涂布作业的模拟。
50.显示控制部120使虚拟空间、工件模型、机器人模型以及工具模型等的图像显示于显示部13。
51.显示控制部120例如在工具模型为具备至少1个喷嘴的喷雾装置的喷雾装置模型的情况下,根据从喷嘴喷射的喷射物的涂布时间,对工件模型的加工部位进行颜色区分并显示于显示部13。
52.存储部12是保存os(operating system:操作系统)、应用程序等的rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)、保存其他各种信息的硬盘驱动器、ssd(solid state drive:固态驱动器)等存储装置。
53.另外,存储部12具有动作图案存储部121和立体形状存储部122。
54.动作图案存储部121存储由表示工具的动作的连续的轨迹构成的多种动作图案。
55.立体形状存储部122存储包含连续的多个平面的立体形状以及包含曲面的立体形状等。
56.显示部13由lcd(liquid crystal display:液晶显示器)、crt(cathode ray tube:阴极射线管)等构成,显示各种图像。
57.操作部14由鼠标、键盘等构成,接受各种输入。
58.接着,对通过本实施方式的机器人编程装置示教机器人的动作程序的详细内容进行说明。图2至图5是表示虚拟空间内的工件模型、机器人模型以及工具模型的图。
59.在图2及图3所示的例子中,工具模型t1是具备至少1个喷嘴的喷雾装置的喷雾装置模型。
60.如图2所示,虚拟空间生成部111生成三维地表现了作业空间的虚拟空间,模型配置部112在虚拟空间内配置工件的工件模型w1、机器人的机器人模型r1以及工具的工具模型t1。
61.另外,在图3所示的例子中,模型配置部112在虚拟空间内配置工件的工件模型w2、机器人的机器人模型r1以及工具的工具模型t1。工件模型w2具有与工件模型w1不同的形状。
62.在图4以及5所示的例子中,工具模型t2是具备研磨工具的研磨装置模型。
63.在图4所示的例子中,模型配置部112在虚拟空间内配置工件的工件模型w1、机器人的机器人模型r1以及工具的工具模型t2。
64.在图5所示的例子中,模型配置部112在虚拟空间内配置工件的工件模型w2、机器人的机器人模型r1以及工具的工具模型t2。
65.图6a至图6d是表示工件模型上的加工部位和/或非加工部位的指定的图。图6a是
表示工件模型上的加工部位的指定的图。如图6a所示,加工部位指定部113基于操作部14的操作,指定工件模型w2上的加工部位的至少1个面a1。
66.图6b是表示工件模型上的非加工部位的指定的图。如图6b所示,加工部位指定部113基于操作部14的操作,指定工件模型w2上的非加工部位的至少1个面a2。
67.图6c是表示工件模型上的加工部位的指定的图。如图6c所示,加工部位指定部113基于操作部14的操作,指定工件模型w1上的加工部位的任意范围a3。在图6c的例子中,加工部位指定部113通过用四边形、圆形等图形包围、徒手涂抹等操作来指定任意的范围a3。
68.图6d是表示工件模型上的非加工部位的指定的图。如图6d所示,加工部位指定部113基于操作部14的操作,指定工件模型w1上的非加工部位的任意范围a4。在图6d的例子中,加工部位指定部113通过用四边形、圆形等图形包围、徒手涂抹等操作来指定任意的范围a4。
69.图7是表示动作图案的例子的图。如图7所示,动作图案存储部121存储多种动作图案(例如动作图案p1至p4)。
70.选择部114选择存储于动作图案存储部121的多种动作图案中的1个动作图案。
71.此外,在需要多次加工的情况下,选择部114也可以选择多个动作图案。另外,动作图案存储部121也可以根据涂布、研磨等加工的种类而存储不同的动作图案。
72.图8是表示立体形状的例子的图。如图8所示,立体形状存储部122存储多种立体形状(例如立体形状q1至q2)。选择部114选择立体形状存储部122中存储的多种立体形状中的1个立体形状。另外,选择部114也可以根据工件模型的形状来选择立体形状。另外,立体形状存储部122也可以根据涂布、研磨等加工的种类而存储不同的立体形状。
73.图9是表示将立体形状配置于虚拟空间的例子的图。如图9所示,立体形状配置部115将立体形状q配置在虚拟空间中,使得通过预定的动作图案p填充所选择的预定的立体形状q的面。然后,立体形状配置部115以将动作图案p投影到工件模型w1的至少1个面的方式将立体形状q配置于虚拟空间。
74.图10是表示生成工具的加工路径的例子的图。如图10所示,加工路径生成部116将动作图案p投影到工件模型w1的至少1个面来生成工具的加工路径m。
75.图11是表示变更加工路径的例子的图。如图11所示,变更部117根据加工部位将加工路径m变更为加工路径m1。例如,在图11所示的例子中,变更部117以避开非加工部位n的方式变更动作图案p的形状。另外,变更部117能够指定从非加工部位n到动作图案p的偏移距离d。
76.图12是表示变更加工路径以及动作程序的例子的图。如图12所示,变更部117也可以变更作为加工路径的一部分的加工路径m2,以使工具模型退避到非加工部位n的上方的方式变更动作程序。而且,变更部117能够指定从非加工部位n到动作图案p的偏移距离e。
77.图13是表示变更动作程序的例子的图。如图13所示,在根据动作图案p生成涂布作业的动作程序的情况下,变更部117变更用于喷出物的输出和停止的动作程序,变更加工路径m3中的动作参数,使得在非加工部位n不进行涂布作业。
78.图14是表示基于喷雾装置模型的涂布作业的例子的图。图15是表示基于研磨装置模型的研磨作业的例子的图。
79.在图14所示的例子中,工具位置姿势决定部118根据由加工路径生成部116生成的
加工路径和工件模型w1的至少1个面的法线方向l1、l2、l3,自动地决定工具模型t1的位置或位置姿势。
80.工具位置姿势决定部118例如基于加工路径和法线方向l1、l2、l3,以从工具模型t1到工件模型w1的距离固定且工具模型t1与工件模型w1的面正交的方式自动地决定工具模型t1的位置或位置姿势。
81.在图15所示的例子中,工具位置姿势决定部118根据由加工路径生成部116生成的加工路径和工件模型w1的至少1个面的法线方向l4、l5、l6,自动地决定工具模型t2的位置或位置姿势。
82.工具位置姿势决定部118例如基于加工路径和法线方向l4、l5、l6,以工具模型t2与工件模型w1的面正交且工具模型t2与工件模型w1的面接触的方式自动地决定工具模型t2的位置或位置姿势。
83.图16及图18是表示涂布作业的模拟的例子的图。图17及图19是表示被涂布的工件模型的例子的图。在图16至图18所示的例子中,工具模型是具备至少1个喷嘴v1的喷雾装置的喷雾装置模型t1。
84.在图16所示的例子中,模拟执行部119使用搭载有喷雾装置模型t1的机器人模型r1,基于动作程序执行一边使喷雾装置模型t1移动一边将从喷嘴v1喷射的喷射物涂布于工件模型w1的涂布作业的模拟。
85.显示控制部120根据从喷嘴喷射的喷射物的涂布时间,对工件模型w1的加工部位进行颜色区分并显示于显示部13。
86.具体而言,显示控制部120例如每隔预定时间计算喷射物的喷射形状的三维模型与工件模型w1之间的干扰部位。
87.接着,显示控制部120在工件模型w1的表面上,在计算出的各个干扰部位每隔预定时间计算干扰次数。
88.显示控制部120将计算出的干扰次数乘以预定时间而计算出干扰部位各自的涂布时间。
89.然后,显示控制部120根据计算出的涂布时间对工件模型w1的加工部位进行颜色区分并显示。
90.此外,对这样的工件模型w1的加工部位进行颜色区分来显示是已知的技术,例如在日本专利第4870831号中公开。这样,如图17所示,显示控制部120除了非加工部位n1以外,对加工部位b1进行颜色区分来显示。
91.在图18所示的例子中,模拟执行部119使用搭载有喷雾装置模型t1的机器人模型r1,基于动作程序,执行一边使喷雾装置模型t1移动一边将从喷嘴v1喷射的喷射物涂布于工件模型w2的涂布作业的模拟。然后,如图19所示,显示控制部120除了非加工部位n2以及n3以外,对加工部位b2进行颜色区分来显示。
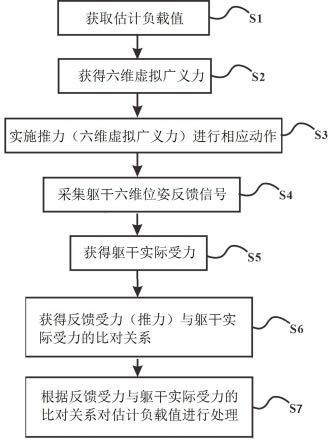
92.图20是表示机器人编程装置的处理的流程图。在该例中,工具模型是具备至少1个喷嘴的喷雾装置的喷雾装置模型。
93.在步骤s1中,虚拟空间生成部111生成三维地表现了作业空间的虚拟空间。
94.在步骤s2中,模型配置部112在虚拟空间内配置工件的工件模型、机器人的机器人模型以及工具的工具模型。
95.在步骤s3中,加工部位指定部113指定工件模型上的加工部位或非加工部位。
96.在步骤s4中,选择部114选择存储于动作图案存储部121的多种动作图案中的1个动作图案。
97.在步骤s5中,选择部114选择立体形状存储部122中存储的多种立体形状中的1个立体形状。
98.在步骤s6中,立体形状配置部115将立体形状配置于虚拟空间,使得通过预定的动作图案填充预定的立体形状的面,并且将动作图案投影到工件模型的至少1个面。
99.在步骤s7中,加工路径生成部116将动作图案投影到工件模型的至少1个面来生成工具的加工路径。
100.在步骤s8中,变更部117根据加工部位变更加工路径和/或动作程序。
101.在步骤s9中,工具位置姿势决定部118根据由加工路径生成部116生成的加工路径和工件模型的至少1个面的法线方向,自动地决定工具模型的位置或位置姿势。
102.在步骤s10中,模拟执行部119使用搭载有喷雾装置模型的机器人模型,基于动作程序,执行一边使喷雾装置模型移动一边将从喷嘴喷射的喷射物涂布于工件模型的涂布作业的模拟。
103.在步骤s11中,显示控制部120根据从喷嘴喷射的喷射物的涂布时间,对工件模型的加工部位进行颜色区分并显示于显示部13。
104.根据本实施方式,机器人编程装置1具备:虚拟空间生成部111,其生成三维地表现了作业空间的虚拟空间;模型配置部112,其在虚拟空间内配置工件的工件模型、机器人的机器人模型以及工具的工具模型;加工部位指定部113,其指定工件模型上的加工部位;立体形状配置部115,其将立体形状配置于虚拟空间内,使得通过预定的动作图案填充预定的立体形状的面,并且将动作图案投影于工件模型的至少1个面;加工路径生成部116,其将动作图案投影于工件模型的至少1个面来生成工具的加工路径;以及变更部117,其基于加工部位来变更加工路径和/或动作程序。
105.机器人编程装置1在根据动作图案生成涂布作业的动作程序的情况下,通过进行遮蔽处理而将喷射物涂布于工件模型。
106.在该情况下,机器人编程装置1能够以避开进行了遮蔽处理的部位而缩短周期时间的方式示教动作程序。因此,机器人编程装置1能够削减示教作业所需的工时。
107.另外,机器人编程装置1在根据动作图案生成研磨作业的动作程序的情况下,能够以避开工件模型上的要研磨的对象面以外的方式示教动作程序。因此,机器人编程装置1能够削减示教作业所需的工时。
108.另外,加工部位指定部113指定工件模型上的加工部位的至少1个面或加工部位的任意范围。由此,机器人编程装置1能够适当地示教涂布作业或研磨作业的动作。
109.另外,加工部位指定部113指定工件模型上的非加工部位的至少1个面或非加工部位的任意范围。由此,机器人编程装置1能够适当地示教避开进行遮蔽处理或研磨的对象面以外的动作。
110.工具位置姿势决定部118根据由加工路径生成部116生成的加工路径和工件模型的至少1个面的法线方向,自动地决定工具模型的位置或位置姿势。由此,机器人编程装置1能够适当地对工具模型的位置或位置姿势进行示教。
111.模拟执行部119使用搭载有喷雾装置模型的机器人模型,基于动作程序,执行一边使喷雾装置模型移动一边将从喷嘴喷射的喷射物涂布于工件模型的涂布作业的模拟。显示控制部120根据从喷嘴喷射的喷射物的涂布时间,对工件模型的加工部位进行颜色区分并显示于显示部13。
112.由此,机器人编程装置1在进行涂布作业的动作程序的模拟的情况下,能够进行考虑了进行了遮蔽处理的部位的模拟。
113.以上,对本发明的实施方式进行了说明,但本发明不限于上述的实施方式。另外,本实施方式所记载的效果只不过是列举了由本发明产生的最优选的效果,本发明的效果并不限定于本实施方式所记载的效果。
114.符号说明
115.1机器人编程装置、
116.11控制部、
117.12存储部、
118.13显示部、
119.14操作部、
120.111虚拟空间生成部、
121.112模型配置部、
122.113加工部位指定部、
123.114选择部、
124.115立体形状配置部、
125.116加工路径生成部、
126.117变更部、
127.118工具位置姿势决定部、
128.119模拟执行部、
129.120显示控制部、
130.121动作图案存储部、
131.122立体形状存储部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。