1.本发明属于宠物喂食器技术领域,特别是涉及一种抽真空喂食器。
背景技术:
2.随着社会经济的发展和城市化进程的加速,越来越多的人们只生活在自己的小圈子中,这些人的人际交往也越来越少,而猫狗等宠物可以作为人们友好的生活伴侣,这些宠物不仅可以帮组人们解除生活的孤寂,还可以调节人们的心理健康。另外,对于一些独居老人,宠物也使其生活的伴侣,饲养宠物有益于老人的身心健康,并且通过与宠物的交流使得老人的生活更加丰富和充实。
3.饲养宠物的过程中,宠物需要时常进食;但在日常生活中,因为大部分的上班族在很多时候无法很好地在家照顾宠物的三餐饮食,或者人们因为出差、旅行等特殊时候,也无法在家照顾宠物的日常饮食;此时,智能投喂器应运而生,人们可以远程控制智能投喂器将其中的食物倒出,倒出来的食物可供宠物食用。
4.现有技术中,为了避免智能投喂器中的食物出现细菌感染的事故,也会在智能投喂器中设置抽真空件,利用抽真空件将智能投喂器中的储料空间抽取成真空状态;但是,现有的智能投喂器存在着密封效果不好、结构复杂、制造成本高等问题。
技术实现要素:
5.本发明针对现有技术中智能投喂器存在着密封效果不好、结构复杂、制造成本高的技术问题,提供了一种抽真空喂食器。
6.鉴于以上技术问题,本发明实施例提供一种抽真空喂食器,包括抽真空件、出粮软管、密封驱动组件以及设有储粮空间和安装空间的外筒;所述抽真空件、所述出粮软管以及所述密封驱动组件均安装在所述安装空间中,且所述抽真空件用于将所述储粮空间抽取成真空状态,所述储粮空间连通所述出粮软管的进口,所述密封驱动组件用于挤压并封闭所述出粮软管;
7.接收抽真空指令时,通过所述密封驱动组件挤压并封闭所述出粮软管之后,通过所述抽真空件将所述储粮空间抽取成真空状态;
8.接收投食指令时,通过所述密封驱动组件打开封闭的所述出粮软管,以使得所述储粮空间中的食物至所述出粮软管输出。
9.可选地,所述密封驱动组件包括抵接杆、直线驱动件以及安装在所述直线驱动件输出端的压杆,所述抵接杆和所述直线驱动件均安装在所述安装空间中,所述出粮软管位于所述抵接杆和所述压杆之间;所述直线驱动件用于带动所述压杆相对于所述抵接杆移动,以将所述出粮软管密封在所述抵接杆和所述压杆之间,或者导通所述出粮软管。
10.可选地,所述密封驱动组件还包括安装在所述安装空间中的导向件,所述导向件上设有滑动孔,所述压杆的一端伸入所述滑动孔中。
11.可选地,所述外筒包括设有所述储粮空间的储粮筒和设有所述安装空间的安装
筒,所述储粮筒可拆卸安装在所述安装筒上,所述安装筒上还设有连接孔,所述出粮软管的进口连通所述连接孔。
12.可选地,所述抽真空喂食器还包括搅拌输送件以及设有出粮通孔的隔板;所述隔板安装在所述储粮空间中,且所述隔板将所述储粮空间分隔为上部空间和下部空间,所述上部空间通过所述出粮通孔连通所述下部空间,所述连接孔连通所述下部空间;
13.所述搅拌输送件包括旋转驱动件以及安装在所述旋转驱动件的输出轴上的转动扇,所述转动扇位于所述下部空间中;所述转动扇上设有间隔分布的储粮腔,所述旋转驱动件用于驱动所述转动扇将所述储粮腔中的粮食输送至所述连接孔。
14.可选地,所述搅拌输送件还包括安装在所述旋转驱动件的输出轴上的搅拌扇,所述搅拌扇位于所述上部空间中;所述旋转驱动件还用于驱动所述搅拌扇搅拌所述上部空间中的粮食。
15.可选地,所述外筒还包括盖板和密封圈,所述盖板上设有环形凹槽,所述密封圈安装在所述环形凹槽中,所述盖板通过所述环形凹槽盖合在所述储粮筒的开口处。
16.可选地,所述抽真空件包括真空泵、三通管以及用于检测所述储粮空间中压力值的气压阀,所述三通管设有相互连通的第一管口、第二管口以及第三管口;所述真空泵的吸气口连通所述第一管口,所述第二管口连通所述气压阀的检测口,所述第三管口均连通所述储粮空间;
17.通过所述气压阀检测到所述储粮空间的压力值小于第一预设负压值时,控制所述真空泵停止对所述储粮空间进行抽真空。
18.可选地,所述外筒上还设有连通所述储粮空间的连接头,所述抽真空件还包括软接头和单向阀,所述第三管口连通所述单向阀的出口,所述单向阀的进口通过所述出粮软管连通所述连接头。
19.可选地,所述抽真空喂食器还包括喂食盆,所述喂食盆与所述出粮软管的出口相对设置。
20.本发明中,接收抽真空指令时,通过所述密封驱动组件挤压并封闭所述出粮软管之后,通过所述抽真空件将所述储粮空间抽取成真空状态;具体地,接收到抽真空指令后,所述密封驱动组件挤压所述出粮软管,以使得所述出粮软管两侧内壁面相互贴合(也即所述出粮软管被密封)之后,所述抽真空件再将所述储粮空间中抽取成真空状态。本发明中,在所述储粮空间处于真空状态时,所述出粮软管被密封住,从而保证了所述储粮空间的密封性,避免了空气中的细菌对所述储粮空间中的食物的干扰,保证了食物的安全性,延长了食物的储存时间。
21.接收投食指令时,通过所述密封驱动组件打开封闭的所述出粮软管,以使得所述储粮空间中的食物至所述出粮软管输出。具体地,接收投食指令后,所述密封驱动组件远离所述出粮软管,所述出粮软管将自动恢复至导通的状态,从而所述储粮空间中的食物将自动通过所述出粮软管输出,进而完成了该抽真空喂食器对宠物的投食工作。本发明中,通过所述密封驱动组件对所述出粮软管的挤压动作,即可完成该抽真空喂食器的密封工作,该抽真空喂食器的结构简单、制造成本低。
附图说明
22.下面结合附图和实施例对本发明进一步说明。
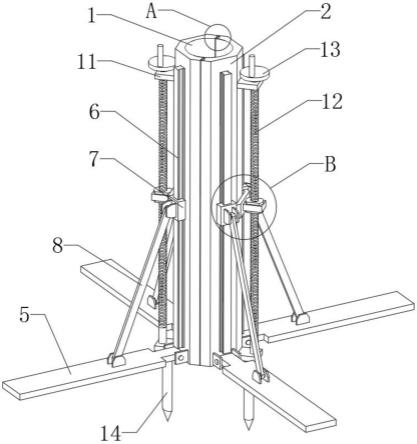
23.图1是本发明一实施例提供的抽真空喂食器的结构示意图;
24.图2是本发明一实施例提供的抽真空喂食器的抽真空组件、密封驱动组件以及出粮软管的结构示意图;
25.图3是本发明一实施例提供的抽真空喂食器的部分结构示意图;
26.图4是本发明一实施例提供的抽真空喂食器的储粮筒及安装在储粮筒上的部件的结构示意图;
27.图5是图4的剖视图;
28.图6是本发明一实施例提供的抽真空喂食器的搅拌输送件的结构示意图;
29.图7是本发明一实施例提供的抽真空喂食器的安装筒及其内部器件的结构示意图。
30.说明书中的附图标记如下:
31.1、抽真空件;11、真空泵;12、三通管;13、气压阀;14、软接头;15、单向阀;2、出粮软管;3、密封驱动组件;31、抵接杆;32、直线驱动件;33、压杆;34、导向件;341、滑动孔;4、外筒;41、储粮筒;411、储粮空间;4111、上部空间;4112、下部空间;42、安装筒;421、安装空间;43、搅拌输送件;431、旋转驱动件;432、转动扇;4321、储粮腔;433、搅拌扇;44、隔板;441、出粮通孔;45、盖板;46、连接头;5、喂食盆。
具体实施方式
32.为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
33.需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本发明的限制。
34.如图1、图2、图4以及图7所示,本发明一实施例提供的一种抽真空喂食器,包括抽真空件1、出粮软管2、密封驱动组件3以及设有储粮空间411和安装空间421的外筒4;所述抽真空件1、所述出粮软管2以及所述密封驱动组件3均安装在所述安装空间421中,且所述抽真空件1用于将所述储粮空间411抽取成真空状态,所述储粮空间411连通所述出粮软管2的进口,所述密封驱动组件3用于挤压并封闭所述出粮软管2;可以理解地,所述出粮软管2可以由柔性塑料、软胶、硅胶等材料制成;所述密封驱动组件3通过挤压的方式来封闭所述出粮软管2;也即,所述密封驱动组件3驱动所述出粮软管2的两侧内侧壁相互贴合时,所述出粮软管2被密封住,从而所述出粮软管2不与外界环境连通;当所述密封驱动组件3没有挤压所述出粮软管2,或者所述密封驱动组件3挤压所述出粮软管2,但是所述出粮软管2没有被密封时,所述储粮空间411通过所述出粮软管2连通外界环境。
35.本发明中,所述外筒4上设有间隔分布的储粮空间411和安装空间421,所述储粮空间411可用于长期储存粮食,所述安装空间421可以用于安装抽真空件1、密封驱动组件3等
部件,从而避免了所述储粮空间411中的粮食干扰所述安装空间421中的部件。
36.接收抽真空指令时,通过所述密封驱动组件3挤压并封闭所述出粮软管2之后,通过所述抽真空件1将所述储粮空间411抽取成真空状态;可以理解地,所述抽真空指令可以是用户通过手机、平板等移动终端进行相关操作后发出的指令,还可以是控制板通过自身程序自动发出的指令(例如,该抽真空喂食器投出食物并关闭出粮软管2之后,控制板自动发出的抽真空指令)。具体地,接收到抽真空指令后,所述密封驱动组件3挤压所述出粮软管2,以使得所述出粮软管2两侧内壁面相互贴合(也即,所述出粮软管2被密封)之后,所述抽真空件1再将所述储粮空间411中抽取成真空状态。本发明中,在所述储粮空间411处于真空状态时,所述出粮软管被密封住,从而保证了所述储粮空间411的密封性,避免了空气中的细菌对所述储粮空间411中的食物的干扰,保证了食物的安全性,延长了食物的储存时间。
37.接收投食指令时,通过所述密封驱动组件3打开封闭的所述出粮软管2,以使得所述储粮空间411中的食物至所述出粮软管2输出。可以理解地,所述投食指令可以是用户通过手机、平板等终端设备进行相关操作后发出的指令,也可以是控制板根据自身程序发出的指令(例如定时投食指令等)。具体地,接收投食指令后,所述密封驱动组件3远离所述出粮软管2,所述出粮软管2将自动恢复至导通的状态,从而所述储粮空间411中的食物将自动通过所述出粮软管2输出,进而完成了该抽真空喂食器对宠物的投食工作。本发明中,通过所述密封驱动组件3对所述出粮软管2的挤压动作,即可完成该抽真空喂食器的密封工作,该抽真空喂食器的结构简单、制造成本低。
38.在一实施例中,如图2所示,所述密封驱动组件3包括抵接杆31、直线驱动件32以及安装在所述直线驱动件32输出端的压杆33,所述抵接杆31和所述直线驱动件32均安装在所述安装空间421中,所述出粮软管2位于所述抵接杆31和所述压杆33之间;所述直线驱动件32用于带动所述压杆33相对于所述抵接杆31移动,以将所述出粮软管2密封在所述抵接杆31和所述压杆33之间,或者导通所述出粮软管2。可以理解地,所述直线驱动件32包括但不限于直线电机、气压缸、液压缸、丝杆螺母机构等器件;所述出粮软管2的出口穿过所述压杆33和所述抵接杆31之间的挤压空间后伸入到外界环境中;所述抵接杆31和所述直线驱动件32均固定安装在所述外筒4的底板上。
39.具体地,接收到抽真空指令时,所述直线驱动件32驱动所述压杆33朝向所述抵接杆31移动,直至所述压杆33压扁并密封所述出粮软管2。
40.接收投食指令时,所述直线驱动件32驱动所述压杆33朝向远离所述抵接杆31的一端移动,直至密封的所述出粮软管2被导通。本实施例中,该密封驱动组件3的结构简单、制造成本低、占用空间小。
41.在一实施例中,如图2所示,所述密封驱动组件3还包括安装在所述安装空间421中的导向件34,所述导向件34上设有滑动孔341,所述压杆33的一端伸入所述滑动孔341中。可以理解地,所述滑动孔341为长条形通孔,所述长条形通孔的长度方向与所述压杆33的移动方向平行;具体地,所述导向件34设置有两个,所述压杆33的相对两端分别插入两个所述导向件34的滑动孔341中。本实施例中,所述导向件34的设计,保证了所述压杆33挤压所述出粮软管2的稳定性。
42.在另一实施例中,所述密封驱动组件3包括双向驱动件(图未示)、第一挤压杆(图未示)以及第二挤压杆(图未示),所述第一挤压杆安装在所述双向驱动件的第一输出端,所
述第二挤压杆安装在所述双向驱动件的第二输出端,所述双向驱动件用于驱动所述第一挤压杆和所述第二挤压杆相互靠近或远离,以密封或打开所述出粮软管2。
43.在一实施例中,如图3、图4以及图7所示,所述外筒4包括设有所述储粮空间411的储粮筒41和设有所述安装空间421的安装筒42,所述储粮筒41可拆卸安装在所述安装筒42上,所述安装筒42上还设有连接孔,所述出粮软管2的进口连通所述连接孔。可以理解地,所述储粮筒41可拆卸安装在所述安装筒42的上方,所述储粮空间411中的粮食通过所述连接孔输入到所述出粮软管2中。在一具体实施例中,所述外筒4上设有插接头,所述插接头上设有所述连接孔,所述出粮软管2的进口套接在所述插接头上,从而便于所述出粮软管2与所述外筒4的拆卸。
44.在一具体实施例中,所述安装筒42上还设有容纳凹槽,所述储粮筒41安装在所述容纳凹槽中。
45.在一实施例中,如图4至图6所示,所述抽真空喂食器还包括搅拌输送件43以及设有出粮通孔441的隔板44;所述隔板44安装在所述储粮空间411中,且所述隔板44将所述储粮空间411分隔为上部空间4111和下部空间4112,所述上部空间4111通过所述出粮通孔441连通所述下部空间4112,所述连接孔连通所述下部空间4112;可以理解地,所述连接孔设置在所述下部空间4112的底部;在竖直方向上,所述出粮通孔441与所述连接孔错开设置;所述上部空间4111可以长期储存粮食。
46.所述搅拌输送件43包括旋转驱动件431以及安装在所述旋转驱动件431的输出轴上的转动扇432,所述转动扇432位于所述下部空间4112中;所述转动扇432上设有间隔分布的储粮腔4321,所述旋转驱动件431用于驱动所述转动扇432将所述储粮腔4321中的粮食输送至所述连接孔。可以理解地,所述储粮腔4321为上下开口式结构,所述储粮腔4321的上端与所述隔板44抵接,所述储粮腔4321的下端与所述下部空间4112的底部抵接。具体地,所述上部空间4111中的粮食通过所述出粮通孔441输送至所述储粮腔4321中,所述旋转驱动件431带动转动扇432转动,当储存有粮食的所述储粮腔4321转动至所述连接孔上方时,所述储粮腔4321中的粮食将通过所述连接孔输送至所述出粮软管2中。本实施例中,通过控制所述旋转驱动件431带动所述转动扇432转动的圈数,可以完成粮食的定量投食工作;并且该抽真空喂食器的结构简单,制造成本低。
47.另外,将所述旋转驱动件431和所述转动扇432均安装在所述储粮筒41的下部空间4112中,所述储粮筒41和所述安装筒42可拆卸连接,从而便于所述旋转驱动件431和所述转动扇432的清理和检修。
48.在一具体实施例中,所述旋转驱动件431通过固定件(螺钉等)固定在所述下部空间4112的底部,且所述旋转驱动件431的下部空间4112的底部之间设有密封圈,该密封圈进一步保证了外筒4的密封性能。
49.在一实施例中,如图4至图6所示,所述搅拌输送件43还包括安装在所述旋转驱动件431的输出轴上的搅拌扇433,所述搅拌扇433位于所述上部空间4111中;所述旋转驱动件431还用于驱动所述搅拌扇433搅拌所述上部空间4111中的粮食。可以理解地,所述旋转驱动件431的输出轴穿过所述隔板44伸入所述上部空间4111中,所述转动扇432可拆卸安装在所述旋转驱动件431的输出轴上。本实施例中,所述旋转驱动件431带动所述搅拌扇433转动,转动的所述搅拌扇433可以将所述上部空间4111中的颗粒较大的食物搅拌成细小颗粒,
细小颗粒的食物通过所述搅拌扇433转动至所述出粮通孔441的上方并掉落至所述储粮腔4321中。本发明中,旋转驱动件431可同时带动搅拌扇433和转动扇432转动,从而所述提高了该抽真空喂食器的集成度。
50.在一实施例中,如图4和图5所示,所述外筒4还包括盖板45和密封圈,所述盖板45上设有环形凹槽,所述密封圈安装在所述环形凹槽中,所述盖板45通过所述环形凹槽盖合在所述储粮筒41的开口处。可以理解地,所述外筒4的上端为开口结构,所述盖板45通过所述环形凹槽密封盖合在所述储粮筒41的开口处,且所述环形凹槽中设有密封圈,从而保证了所述储粮筒41的密封性。本实施例中,当用户需要往所述上部空间4111中投放食物时,首先将所述盖板45打开,从而可以往所述上部空间4111中投放食物。
51.进一步地,如图4和图5所示,所述盖板45上设有泄压孔,所述泄压孔中安装有泄压减;所述泄压件可以是泄压阀,当所述上部空间4111中的压力小于或等于预设极限低压时,所述泄压阀将自动泄压;所述泄压件还可以为密封塞,从而用户可以通过所述密封塞对所述储粮空间411进行手动泄压处理。
52.在一实施例中,如图2所示,所述抽真空件1包括真空泵11、三通管12以及用于检测所述储粮空间411中压力值的气压阀13,所述三通管12设有相互连通的第一管口、第二管口以及第三管口;所述真空泵11的吸气口连通所述第一管口,所述第二管口连通所述气压阀13的检测口,所述第三管口均连通所述储粮空间411;可以理解地,所述真空泵11的出气口通过管道连通外界环境;由于所述储粮空间411与所述三通管12连通,从而所述气压阀13通过所述第三管口可以实时检测所述储粮空间411中的压力值;将所述气压阀13安装在所述安装空间421中,且其处于大气压中,从而便于检测所述储粮空间411的压力值。
53.通过所述气压阀13检测到所述储粮空间411的压力值小于第一预设负压值时,控制所述真空泵11停止对所述储粮空间411进行抽真空。可以理解地,所述第一预设负压值可以根据实际需求来设定,例如,所述第一预设负压值为-20pa、-25pa以及-15pa等;在一具体实施例中,所述第一预设压力值为-20pa,当所述气压阀13检测到所述储粮空间411中的压力值小于-20pa(例如,所述储粮空间411中的压力为-21pa)时,控制所述真空泵11停止对所述储粮空间411进行抽真空,从而避免所述储粮空间411因负压过大而发生毁坏该抽真空喂食器的事故,保证了该抽真空喂食器的安全性。
54.进一步地,当所述气压阀13检测到所述储粮空间411中的压力值大于第二预设负压值时,控制所述真空泵11对所述储粮空间411进行抽真空处理,直至所述储粮空间411中的压力值小于第一预设负压值;其中,所述二预设负压值大于所述第一预设负压值;例如,所述第二预设负压值为-10pa,所述第一预设负压值为-20pa。可以理解地,在所述出粮软管2封闭的状态下,所述储粮筒41难免会有泄露,当所述气压阀13检测到所述储粮空间411中压力值(例如-9pa)大于第一预设压力值时,自动控制所述真空泵11对所述储粮空间411进行抽真空处理,直至所述气压阀13检测到储粮空间411中的压力值小于所述第一预设负压值,从而所述储粮空间411中的压力值始终维持在合适的负压范围内(也即所述储粮空间411中的压力值大于所述第二预设负压值,且小于所述第一预设负压值),进一步保证了所述储粮空间411中食物的安全性。
55.在一实施例中,如图2所示,所述外筒4上还设有连通所述储粮空间411的连接头46,所述抽真空件1还包括软接头14和单向阀15,所述第三管口连通所述单向阀15的出口,
所述单向阀15的进口通过所述出粮软管2连通所述连接头46。可以理解地,所述连接头46设置在所述储粮筒41的下端,所述单向阀15通过气管连通所述软接头14,所述连接头46插入所述软接头14的通孔中;本实施例中,所述第三管口通过所述单向阀15和所述软接头14连接所述连接头46,所述真空泵11可以通过所述单向阀15抽取所述储粮空间411中的空气,但是外界的空气不能通过所述单向阀15进入到所述储粮空间411中,从而保证了所述储粮空间411维持在真空状态;且所述储粮空间411、所述单向阀15以及所述三通管12相互连通,从而所述气压阀13可以通过所述三通管12的第三管口实时检测所述储粮空间411的压力值。另外,所述单向阀15通过所述软接头14连接所述连接头46,从而所述软接头14与所述连接头46之间的拆卸简单,进而便于所述储粮筒41和所述安装筒42的拆装。
56.在一实施例中,如图1所示,所述抽真空喂食器还包括喂食盆5,所述喂食盆5与所述出粮软管2的出口相对设置。可以理解地,所述喂食盆5位于所述出粮软管2的出口的下方,从所述出粮软管2输出的粮食将掉落至所述喂食盆5中,从而所述喂食盆5中的食物可供宠物食用。
57.以上仅为本发明的抽真空喂食器的实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。