材料输送系统和方法
1.相关申请的交叉引用
2.本技术要求2019年8月13日提交的美国临时申请号62/885,978的权益。
背景技术:
3.本披露内容涉及材料输送系统,更具体地涉及用于分配可流动化学产品的材料输送系统和方法。
4.无人机或无人驾驶飞行器(uav)在农业应用中的使用(比如用化学产品处理田地)正在迅速扩大。化学产品容器联接到uav和安装到uav的材料分配系统,并且uav在分配化学产品的同时在要处理的区域上方飞行。许多容器是由重量很大的刚性材料构成的。此外,用化学产品填充和重新填充这些容器可能是困难且危险的。
5.需要一种轻质化学品容器,其将节省由uav消耗的电力并提高uav的运行时间。此外,需要一种其中已经容纳化学品的容器,以提高易用性并降低风险。
技术实现要素:
6.在一个方面,提供了一种空中化学品输送系统。该空中化学品输送系统包括:包括机身的无人驾驶飞行器(uav)、安装到该uav的材料分配系统、以及可释放地安装到该uav的可折叠储存容器。该储存容器容纳可流动化学产品并且包括至少一个联接器,该至少一个联接器适于将该储存容器联接到该uav的材料分配系统并且允许该可流动化学产品通过其进行分配。
7.在另一方面,提供了一种方法。该方法包括提供容纳可流动化学产品的可折叠储存容器。该储存容器包括至少一个联接器。该方法还包括将该储存容器可释放地安装到无人驾驶飞行器(uav)、以及使用该至少一个联接器将该储存容器联接到安装到该uav的材料分配系统。该方法进一步包括使用该材料分配系统从该uav分配该可流动化学产品。
8.在另一方面,提供了一种空中流体输送系统。该空中流体输送系统包括:包括机身无人驾驶飞行器(uav)、安装到该uav的液体分配系统、以及可释放地安装到该uav的可折叠液体储存容器。该液体储存容器容纳预定剂量的化学产品并且包括至少一个流体联接器。该液体储存容器被配置为经由该至少一个流体联接器接收液体以与该化学产品形成液体混合物,并且该至少一个流体联接器适于将该液体储存容器流体联接到该uav的液体分配系统以用于通过其分配该液体混合物。
9.在又一方面,提供了一种方法。该方法包括将液体引入到容纳预定剂量的化学产品的可折叠液体储存容器中以形成液体混合物。该液体储存容器包括至少一个流体联接器。该方法还包括将该液体储存容器可释放地安装到无人驾驶飞行器(uav)、使用该至少一个流体联接器将该液体储存容器流体联接到安装到该uav的液体分配系统、以及使用该液体分配系统从该uav分配该液体混合物。
10.在又一方面,提供了一种可折叠液体储存容器。该可折叠液体储存容器包括由超轻质材料构成的柔性侧壁。该侧壁至少部分地限定空腔。该可折叠液体储存容器还包括设
置在该空腔内的预定剂量的化学产品、和联接到该侧壁并被配置用于可释放地联接到无人驾驶飞行器(uav)的至少一个机械联接器。该可折叠液体储存容器进一步包括与该空腔流体连通地联接的至少一个流体联接器。该液体储存容器被配置为经由该至少一个流体联接器将液体接收到该空腔中以与该化学产品形成液体混合物,并且该至少一个流体联接器适于将该空腔流体联接到该uav的液体分配系统,使得该液体混合物能够从该uav液体分配系统分配。
11.在又一方面,提供了一种液体化学品输送系统。该液体化学品输送系统包括:包括至少一个肩带的背包组件、联接到该背包组件的框架、联接到该背包组件的液体分配系统、以及可释放地安装到该框架的可折叠液体储存容器。该液体储存容器容纳预定剂量的化学产品并且包括至少一个流体联接器。该液体储存容器被配置为经由该至少一个流体联接器接收液体以与该化学产品形成液体混合物,并且该至少一个流体联接器适于将该液体储存容器流体联接到该液体分配系统以用于通过其分配该液体混合物。
附图说明
12.图1是示例性空中材料输送系统的示意图。
13.图2是包括液体分配系统的示例性空中材料输送系统的立体图。
14.图3是图2中所示的空中材料输送系统的第一侧视图。
15.图4是图2中所示的空中材料输送系统的第二侧视图。
16.图5是图2中所示的空中材料输送系统的另一个立体图。
17.图6是适合于与图1至图5中所示的空中材料输送系统一起使用的示例性可折叠储存容器的立体图。
18.图7是图6中所示的可折叠储存容器的剖视图,图示了其中容纳的可流动化学产品。
19.图8是图6和图7中所示的可折叠储存容器的截面图,图示了与液体混合的可流动化学产品。
20.图9是用于联接到图1至图5中所示的空中材料输送系统的处于倒置取向的图6至图8所示的可折叠储存容器的另一个截面图。
21.图10是联接到液体分配系统的图6至图9中所示的可折叠储存容器的示意图。
22.图11和图12分别是适合于与图1至图5中所示的空中材料输送系统一起使用的可折叠液体储存容器的附加实施例的立体图和侧视图。
23.图13和图14分别是适合于与图1至图5中所示的空中材料输送系统一起使用的可折叠液体储存容器的另一个实施例的立体图和侧视图。
24.图15和图16分别是适合于与图1至图5中所示的空中材料输送系统一起使用的可折叠液体储存容器的又一个实施例的立体图和侧视图。
25.图17是另一个示例性空中材料输送系统的侧视图。
26.图18是图17中所示的空中材料输送系统的立体图。
27.图19是适合于与图17和图18中所示的空中输送系统一起使用的示例性储存容器的侧视图。
28.图20是图19中所示的储存容器的另一个侧视图。
29.图21是适合于与图17和图18中所示的空中输送系统一起使用的示例性材料分配系统的截面图。
30.图22是图21中所示的材料分配系统的旋转分配器的放大截面图。
31.图23是适合于与图17和图18中所示的空中输送系统一起使用的另一个示例性材料分配系统的俯视图。
32.图24是图23中所示的材料分配系统的端视图。
33.图25是图23和图24中所示的材料分配系统的截面图。
34.图26是使用或操作空中材料输送系统(比如图1至图5中所示的空中材料输送系统和/或图17和图18中所示的空中材料输送系统)的方法的流程图。
35.图27是使用或操作空中材料输送系统(比如图1至图5中所示的空中材料输送系统和/或图17和图18中所示的空中材料输送系统)的另一种方法的流程图。
36.图28是根据本披露内容的另一个实施例的基于地面的材料输送系统的前视图。
37.图29是图28中所示的基于地面的材料输送系统的侧视图。
38.图30是图28和图29中所示的基于地面的材料输送系统的立体图。
39.图31是联接到背包组件的图28和图29中所示的基于地面的材料输送系统的立体图。
具体实施方式
40.本披露内容总体上是材料输送系统,所述材料输送系统包括可释放地连接到材料输送系统的化学品储存容器。在具体实施例中,本披露内容涉及材料输送系统,所述材料输送系统包括安装到无人驾驶飞行器(uav)或无人机的轻质化学品储存容器。具体地,该储存容器为由轻质材料形成的柔性储存容器,使得当从储存容器分配化学品时降低了能量消耗并提高了uav的飞行持续时间。此外,储存容器的柔性消除了对通风的需要,这简化了材料输送系统并且还降低了在处置储存容器时暴露于其中的化学产品的风险。储存容器可以是可重复使用的和/或可回收的,以减少浪费。替代地,储存容器可以是可抛的,以减少对系统清理的需要。
41.在一些实施例中,储存容器使用可移除的框架安装到uav,这使得储存容器的安装和移除更简单且更快,从而减少了不必要的停机时间。另外,本文描述的储存容器的实施例可以经由卡扣配合连接联接到uav的材料输送系统,从而提高便利性并简化材料输送系统的使用。
42.图1至图5图示了根据本披露内容的示例性空中材料或化学品输送系统100。在示例性实施例中,空中材料输送系统100使用无人驾驶飞行器(uav)或无人机102来实现。如本文所用,uav总体上是指任何无人驾驶的或遥控的飞行器或系统。空中材料输送系统100包括uav 102和安装到其上的可折叠储存容器104。储存容器104包括容纳在其中的可流动化学材料(图1至图5中未示出),以使用空中材料输送系统100进行分配。如本文所用,术语“可流动”是指当受到比如重力或泵引起的压力差等作用力时能够流动或进行流动的材料,并且包括例如但不限于液体和固体,比如粉末和颗粒。
43.uav 102包括总体上由毂108和多个辐条状臂110限定的机身106。用于从储存容器104分配材料的材料分配系统112安装到uav机身106。材料分配系统112可以是液体材料分
配系统或干材料分配系统,该系统被配置为分配可流动或可倾倒的材料,比如液体或非气态流体、颗粒和/或粉末。
44.在示例性实施例中,储存容器104可释放地或可移除地安装到uav机身106。空中材料输送系统100包括联接到uav机身106的框架114,以用于将储存容器104安装到uav机身106。在示例性实施例中,框架114联接到uav机身106的顶部116。在一些实施例中,框架114可释放地联接到uav机身106,以促进将储存容器104快速且简单地联接到uav机身106(例如,通过将储存容器104联接到框架114并将框架114联接到uav机身106)。替代地,框架114不可释放地或永久地安装到uav机身106。
45.在示例性实施例中,框架114具有大体倒u形并且包括由顶杆120限定的顶部118和由两个腿杆124限定的底部122。框架底部122(例如,两个腿杆124)联接到uav机身106,具体地联接到uav机身的顶部116。框架底部122可以经由任何合适的联接机构(比如经由卡扣配合或摩擦配合)联接到uav机身106的顶部116。框架顶部118在uav机身106的顶部116上方延伸并且为储存容器104提供安装位置。在一些实施例中,框架114包括一个或多个机械联接器126,以用于将储存容器104联接到其上。例如,框架114包括钩子(例如,一对钩子),这些钩子联接到顶杆120并且被配置为接收储存容器104。框架可以包括联接到框架114的任何部分的任何合适的机械联接器126,比如卡扣、按钮、螺栓等。此外,框架114中可以包括一个或多个孔,该一个或多个孔作为机械联接器126(例如,用于接收钩子等)起作用。
46.uav 102还包括用于产生升力以促进uav 102飞行的推进系统103。推进系统103总体上可以包括使uav 102能够如本文所述起作用的任何合适的推进系统。在所示实施例中,推进系统103是包括多个转子105的旋翼推进系统,这些转子可以包括可变螺距或固定螺距叶片。尽管uav 102被示出和描述为旋翼uav,但应当理解,本文描述的系统和方法可以在除旋翼uav之外的uav(包括固定翼uav)上实现。在这种实施例中,推进系统103可以包括螺旋桨,作为对转子105的补充或替代。
47.推进系统103还包括一个或多个马达107,该一个或多个马达可操作地联接到转子105并且被配置为响应于控制信号而驱动或旋转转子。尽管在图1中仅图示了一个马达107,但应当理解,推进系统103可以包括任何合适数量的马达,这些马达使uav 102能够如本文所述起作用。在一些实施例中,例如,每个转子105具有可操作地连接到其上的专用马达,以用于控制相应转子105的旋转。此外,马达107可以是使推进系统103能够如本文所述起作用的任何合适的马达,包括例如但不限于电动马达和汽油动力发动机。
48.为了启动推进系统103,控制信号被发送到马达107(例如,从控制器142,本文进一步描述)。马达107启动转子105,使转子105旋转并产生升力。例如,可以通过改变每个转子105的相对速度以改变由此产生的推力和力矩来实现对uav 102的控制。uav 102可以包括附加部件,包括一个或多个传感器(例如,惯性传感器、陀螺仪、加速度计、gps传感器等)和/或成像设备(例如,相机、录像机)。
49.空中材料输送系统100进一步包括电源140,该电源可操作地联接到uav机身106并被配置为向uav 102(例如,向马达107、控制器142等)和/或材料分配系统112提供电力以执行本文所述的功能(例如,飞行、分配材料等)。在示例性实施例中,电源140包括电池,应理解为包括单个电池、多个电池、电池组等。
50.另外,uav 102包括机载控制器或计算机142,该控制器或计算机与空中材料输送
系统100的各种部件(例如,uav 102和材料分配系统112)以可操作控制通信方式联接并且促进对其的各种电子和/或自动控制。例如,控制器142被配置为根据存储或接收的控制来控制uav 102和材料分配系统112。控制器142包括用于执行指令的至少一个处理器144。在一些实施例中,可执行指令存储在存储器146中。在一些实施例中,处理器144包括一个或多个处理单元(例如,在多核配置中)。存储器146是允许存储和检索比如可执行指令和/或其他数据等信息的任何设备。具体地,在一些实施例中,存储器146包括但不限于比如动态ram(dram)或静态ram(sram)等随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom)、电可擦可编程只读存储器(eeprom)和非易失性ram(nvram)。上述存储器类型仅是示例性的,并且因此不限制可用于存储计算机程序的存储器类型。
51.在一些实施例中,控制器142经由有线和/或无线连接联接到空中材料输送系统100的任何部件。在一些实施例中,控制器142被配置为促进推进系统103的启动和控制,以控制uav 102沿预定(例如,存储的)或受控(例如,由用户手动驾驶)路径的运动,并促进根据存储或接收的控制来启动和停用材料分配系统112。在一个示例性实施例中,控制器142被配置为促进操作uav 102使得uav102飞过田地,并且促进操作材料分配系统112以从uav 102分配容纳在储存容器104中的可流动化学产品,同时uav 102飞过田地,使得将可流动化学产品施加到田地。
52.相应地,控制器142可以包括通信接口148,该通信接口可通信地联接到本文所述的空中材料输送系统100的任何部件和/或到发送控制以用于控制空中材料输送系统的操作的远程设备(例如,遥控器)。在一些实施例中,通信接口148包括例如但不限于有线或无线网络适配器或适于通过无线电链路(例如窄带或宽带无线电链路)、蜂窝或移动数据网络(例如,3g、4g或5g网络技术)或蓝牙链路进行通信的无线数据收发器。
53.在示例性实施例中,材料分配系统112是液体材料分配系统,并且包括用于将流体从储存容器104输送到相应流体出口的多个流体导管150(见图5)。在示例性实施例中,每个流体导管150沿着uav臂110中的相应一个延伸到位于臂110的远端或自由端154处的相应流体出口或喷嘴152。每个流体导管150基本上平行于其安装到的相应臂110而定向。在一些实施例中,流体导管150可以定位在臂110内和/或与该臂同轴定位。在其他实施例中,流体导管150安装在臂110的顶部表面或底部表面(未标记)。流体导管150可以包括使液体能够流过的任何合适的导管,比如柔性或刚性管。在一个特定实施例中,流体导管是由交联聚乙烯材料形成的。
54.在一些实施例中,每个流体导管150经由联接子系统(例如,图10中所示的联接子系统230)流体联接到储存容器104,该联接子系统将液体材料分配系统112流体联接到储存容器104。如本文进一步描述的,联接子系统与储存容器104处于流体连通。每个喷嘴152安装在相应uav臂110的自由端154上或其附近。材料分配系统112通过喷嘴152将材料从储存容器104分配到目标(例如,田地)上。喷嘴152可以包括任何合适的喷嘴类型,包括例如但不限于扁平扇形、空心锥形和/或旋转盘型喷嘴。
55.现在转向图6和图7,更详细地示出了可折叠储存容器104。可折叠储存容器104包括本体202和联接到本体202的联接器204。在示例性实施例中,储存容器104被实施为袋子,并且其本体202包括基部206(例如,本体202的与联接器204相反的端部)和由柔性材料构成的柔性侧壁208,使得储存容器104是可折叠的。侧壁208可以是至少部分半透明的或透明
的,使得可以透过该侧壁看到储存容器104的内容物。替代地,侧壁208可以是不透明的。侧壁208和/或基部206(例如,储存容器104的本体202)可以由柔性膜构成,比如包括塑料、聚乙烯(例如,低密度聚乙烯(ldpe))、改性橡胶、聚对苯二甲酸乙二酯、尼龙、膜(例如,耐化学腐蚀的膜)和/或膜层压材料中的至少一种的柔性膜。该柔性膜可以具有从约3密耳到约6.5密耳的厚度。柔性材料也可以是超轻质材料。如本文关于储存容器104所使用的,术语“超轻质材料”是指面密度小于0.15g/cm2的材料。在一些实施例中,超轻质材料的面密度小于0.1g/cm2、小于0.05g/cm2或甚至小于0.04g/cm2。在一些实施例中,由超轻质材料形成的储存容器104比传统刚性容器轻得多。例如,储存容器104的质量小于传统刚性容器质量的80%、或小于75%、或小于50%、或甚至小于传统刚性容器质量的30%。在一些实施例中,柔性材料适合于重复使用和/或回收。在一些实施例中,侧壁208由比联接器204更薄或更柔性的材料形成,使得联接器204比侧壁208更刚性。在这种实施例中,侧壁208可以由超轻质材料构成,而联接器204可以由非超轻质材料构成。附加地或替代地,侧壁208可以包括与联接器204相邻的厚区段以提供适当刚性的区域,联接器204可以沿着该区域联接到侧壁208。在这种实施例中,侧壁208的其余部分可以由相对较薄的区段构成,该区段可以由超轻质材料构成。侧壁208的厚区段可以由超轻质材料或非超轻质材料构成。
56.在一些实施例中,侧壁208被热封或以其他方式密封,使得侧壁208至少部分地限定用于容纳要由材料分配系统112分配的材料的空腔210。储存容器104容纳可流动化学产品212,比如液体、可流动颗粒或可流动粉末。在一个实施例中,如图7所示,储存容器104容纳设置在空腔210内的预定剂量214的可流动化学产品212。
57.本体基部206进一步限定空腔210并且可以是装有角撑板的(见图11至图16),使得储存容器104可以保持在直立位置以更容易填充,如本文进一步描述的。此外,储存容器104从基部206朝向联接器204逐渐变细以将可流动化学产品212朝向联接器204汇集,这有助于当储存容器104倒置以从其中分配材料时更完全地清空储存容器104,如本文进一步描述的。
58.联接器204联接到柔性侧壁208并且与空腔210处于流体连通。联接器204促进通过其接收化学材料和/或混合材料(例如,水)以及将储存容器104联接到材料分配系统112。联接器204通过热密封联接到储存容器104的本体202。替代地,联接器204经由任何合适的连接联接到容器本体202,比如螺纹连接(例如,本体202上的外螺纹与联接器204上的内螺纹配合)、卡扣配合,和/或经由粘合剂联接到容器本体。此外,在一些实施例中,储存容器104包括多个联接器204。
59.在示例性实施例中,储存容器104被配置为容纳液体化学产品212,并且相应地,联接器204是与空腔210处于流体连通的流体联接器。另外,流体联接器204是单个流体联接器,该流体联接器既作为用于将液体216接收到储存容器104中以与化学产品212混合的入口起作用,又作为用于将(液体216和化学产品212的)混合物218供应到液体材料分配系统112的出口起作用。在替代性实施例中,流体联接器204是两个单独的流体联接器,其中一个作为入口起作用并且其中一个作为出口起作用。
60.在示例性实施例中,储存容器104被配置为经由流体联接器204接收液体216(例
如,水),以与其中容纳的可流动化学产品212形成液体混合物218。如图8所示,侧壁208包括填充线指示符220,该填充线指示符对应于实现液体混合物218的预定浓度所需的液体填充水平。用户可以通过流体联接器204将液体216(例如,水)引入到储存容器104的空腔210中,直到液体混合物218(例如,水216和预定剂量214的可流动化学产品212)到达填充线指示符220。在一个实施例中,储存容器104被配置为在填充取向222下通过流体联接器204接收液体216,如图6至图8所示。在填充取向222下,流体联接器204定位在容器本体202上方并且能够在重力作用下通过其接收液体。
61.为了从储存容器104分配液体(例如,液体混合物218),储存容器104被倒置成分配取向224,如图9所示。在分配取向224下,储存容器104被配置为通过流体联接器204分配液体混合物218。在示例性实施例中,如图1至图4所示,储存容器104安装到uav机身106并呈倒置的分配取向224联接到材料分配系统112。在倒置的分配取向224下,液体混合物218在重力作用下通过流体联接器204分配到材料分配系统112。
62.图10是联接到液体材料分配系统112的储存容器104的一个实施例的示意图。在此实施例中,材料分配系统112包括用于将流体联接器204与流体导管150流体联接的联接子系统230。联接子系统230包括泵232、连接器234和止回阀236。泵232联接到流体联接器204并且与其处于流体连通。泵232经由连接器234联接到流体联接器204,该连接器提供机械连接,比如“快速连接”连接、螺纹连接、卡扣配合、摩擦配合和/或在泵232与流体联接器204之间的任何其他合适的连接。
63.在所示实施例中,流体联接器204包括单个出口238,并且泵232包括联接到单个出口238的单个入口240。在替代性实施例中,流体联接器204包括多个出口(例如,出口歧管),并且泵232包括联接到多个出口的多个入口(例如,入口歧管)。泵232可以包括适于将液体混合物218从储存容器104驱动通过材料分配系统112的任何合适的泵。
64.泵232与止回阀236串联联接,该止回阀又联接到流体导管150(图10中未标记)。止回阀236确保了被分配的液体材料(例如,液体混合物218)沿正确的方向流动——背离泵232并通过流体导管150。止回阀236防止液体流回泵232。
65.如上所述,储存容器104可通过框架114可释放地安装到uav机身106。当储存容器104安装到uav机身106时,储存容器104处于倒置的分配取向224。储存容器104的“顶部”242位于uav机身106的顶部116上方,而储存容器104的“底部”244位于uav机身106的顶部116下方。在分配取向224下,储存容器104的顶部242可以包括容器本体基部206和侧壁208的离流体联接器204最远的部分,并且储存容器104的底部244可以包括流体联接器204和侧壁208的与其相邻的部分。
66.在操作中,储存容器104联接到材料分配系统112并呈倒置的分配取向224安装到uav机身106,联接子系统230定位在储存容器104下方。在示例性实施例中,如图3和4所示,当储存容器104安装到uav机身106时,储存容器104的流体联接器204延伸到uav机身毂108下方。在这种实施例中,流体联接子系统230联接到在uav机身106外部的流体联接器204。流体联接子系统230可以使用一个或多个紧固件安装到uav机身106,或者可以在空中材料输送系统100的操作期间自由悬挂在uav机身106下方。替代地,可以将联接子系统230封闭在uav机身106内。
67.被分配的液体材料(例如,液体混合物218)在重力作用下通过流体联接器204被吸
入泵232中。此外,由于泵232定位在储存容器104下方,因此泵232可能不需要引水。泵232从储存容器104泵送材料,通过止回阀236,并通过流体导管150以通过喷嘴152分配。在示例性实施例中,因为储存容器104是由柔性材料形成的,所以储存容器104当在其中的材料通过材料分配系统112分配时折叠。因此,储存容器104不需要通风开口。特别地,储存容器104除了流体联接器204之外是完全封闭的,这降低了材料从储存容器104不正确地或无意地分配的可能性。
68.在替代性实施例中,储存容器104设置有附加端口(未示出),该附加端口被限定在与流体联接器相反的表面中(例如,在储存容器104的基部206中)。此端口可联接到外部泵(未示出),该外部泵被配置为将空气(或另一种材料)泵入储存容器104以对空腔210加压。在这种实施例中,空腔210中的材料可以无需借助于泵(例如,泵232)而从加压储存容器104分配。
69.在替代性实施例中,空中材料输送系统100包括多个储存容器104,并且因此被配置为从其中分配多种材料(其可以包括不同的材料或相同的材料)。在这种实施例中,空中材料输送系统100可以包括相应的多个材料分配系统112和/或联接到多个储存容器104的单个材料分配系统112(例如,使用相应的多个流体联接子系统230)。
70.在替代性实施例中,如本文进一步详细描述的,材料分配系统112是被配置为分配例如可流动颗粒和/或可流动粉末的干材料分配系统。在这种实施例中,材料分配系统112包括至少一个材料散布器,比如水平散布器或竖直散布器。散布器可以包括例如联接到uav机身106的底部(在水平散布器的情况下)或联接到uav机身毂108的侧面(在竖直散布器的情况下)的旋转型散布器。散布器可以包括适于联接到储存容器104的联接器204的联接器,使得储存容器104可以通过联接器将可流动颗粒和/或可流动粉末分配到散布器中。
71.图11和图12分别是适合于与图1至图5所示的空中材料分配系统100一起使用的可折叠液体储存容器300的附加实施例的立体图和侧视图。储存容器300与图6至图10所示的储存容器104基本类似。储存容器300包括装有角撑板的基部302,该基部在其相反两端具有两个角撑板304。
72.在示例性实施例中,储存容器包括至少一个机械联接器306,该至少一个机械联接器联接到侧壁208并且被配置用于可释放地联接到uav 102——例如,联接到安装在uav机身106的框架114。储存容器104的机械联接器306可释放地联接到框架114。在框架114也包括机械联接器136的情况下,储存容器104可释放地联接到框架114的机械联接器136。储存容器104的至少一个机械联接器306可以包括例如但不限于索环、钩子、按钮、卡扣、夹子、夹具和/或螺栓。在示例性实施例中,机械联接器306包括一对索环308,这对索环在角撑板304处延伸穿过侧壁208并且被配置用于联接到框架114的机械联接器136(例如,一对钩子)。
73.另外,储存容器300的一个或多个部分可以包括唯一标识符标签310,其促进识别容纳在储存容器300内的材料的类型和/或量(例如,预定剂量214的化学材料212)。例如,标识符标签310可以包括射频标识符(rfid)标签。标识符标签310可以集成到储存容器300的本体202、联接到储存容器300的流体联接器204和/或被配置为在使用其之前(例如,在储存容器300的运输和/或储存期间)密封储存容器300的单独的盖(未具体示出)中。在所示实施例中,标识符标签310集成到流体联接器204中。特别地,标识符标签310集成到流体联接器204的螺纹部分312中,该螺纹部分螺纹联接到储存容器300。
74.标识符标签310被配置为与标签读取器(图11和图12中未示出)无线通信,该标签读取器被配置为从标识符标签310读取识别信息。标签读取器可以集成到uav机身106、控制器142、流体联接器204或联接子系统230的部件(例如,连接器234)中。附加地或替代地,标签读取器可以是用于读取标识符标签的单独设备(例如,手持式标签读取器,未示出)的一部分。例如,标签读取器可以包括rfid读取器。
75.图13和图14分别是适合于与图1至图5中所示的空中材料分配系统100一起使用的可折叠液体储存容器400的另一个实施例的立体图和侧视图。储存容器400与图11和图12所示的储存容器300基本相同。例如,储存容器400包括集成到流体联接器204中的唯一标识符标签402。具体地,标识符标签402集成到流体联接器204的螺纹部分404中,该螺纹部分螺纹联接到储存容器400。附加地,在图13和图14所示的实施例中,标签读取器406集成到流体联接器204中。具体地,标签读取器406集成到流体联接器204的出口部分408中,该出口部分联接到材料分配系统112(例如,联接到泵232的入口240)。
76.图15和图16分别是适合于与图1至图5中所示的空中材料分配系统100一起使用的可折叠液体储存容器500的又一实施例的立体图和侧视图。除非另有说明,否则储存容器500与图11和图12所示的储存容器300基本类似。
77.在此实施例中,储存容器500包括多个侧壁延伸部502,这些侧壁延伸部从与储存容器500的基部206相邻的侧壁208延伸。储存容器500还包括两个成角度的表面504,这些表面在基部206与在基部206的相反两端处的侧壁208之间延伸。每个侧壁延伸部502包括通过相应侧壁延伸部502中的孔联接的索环508。索环508作为用于将储存容器500联接到uav机身106的框架114的机械联接器306起作用。
78.在所示实施例中,唯一标识符标签510集成到流体联接器204中。具体地,标识符标签510集成到流体联接器204的螺纹部分512中,该螺纹部分螺纹联接到储存容器500。另外,标签读取器514集成到流体联接器204中。具体地,标签读取器514集成到流体联接器204的出口部分516中,该出口部分联接到材料分配系统112(例如,联接到泵232的入口240)。
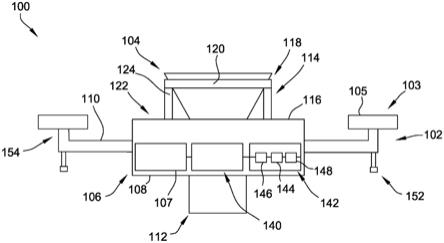
79.图17和图18图示了根据本披露内容的空中材料输送系统600的另一个实施例。在示例性实施例中,与空中材料输送系统100(图1至图5中所示)一样,空中材料输送系统600使用类似于uav 102(图1至图5中也所示)的无人驾驶飞行器(uav)或无人机602来实现。空中材料输送系统600包括uav 602和安装到其上的柔性储存容器604。储存容器604包括容纳在其中的可流动化学材料(未示出),以使用空中材料输送系统600进行分配。
80.uav 602包括总体上由毂608和多个辐条状臂610限定的机身606。用于从储存容器604分配材料的材料分配系统612安装到uav机身606。材料分配系统612可以是液体材料分配系统或干材料分配系统,该系统被配置为分配可流动或可倾倒的材料,比如液体或非气态流体、颗粒和/或粉末。
81.在示例性实施例中,储存容器604可释放地或可移除地安装到uav机身606。空中材料输送系统600包括联接到uav机身606的框架614,以用于将储存容器604安装到uav机身606。框架614可以与uav机身606成一体和/或可以可释放地联接到uav机身。在示例性实施例中,储存容器604插入框架614中以将储存容器604联接到uav机身606。
82.uav 602还包括用于产生升力以促进uav 602飞行的推进系统(图17和图18中未示出),该推进系统与uav 102的推进系统103(图1中示出)基本类似。空中材料输送系统600进
一步包括电源640,该电源可操作地联接到uav机身606并被配置为向uav 602和/或材料分配系统612提供电力以执行本文所述的功能(例如,飞行、分配材料等)。在示例性实施例中,电源640,与uav 102的电源140(图1中所示)一样,包括电池,应理解为包括单个电池、多个电池、电池组等。
83.另外,uav 602包括机载控制器或计算机642,该控制器或计算机与空中材料输送系统100的各种部件(例如,uav 602和材料分配系统612)以可操作控制通信方式联接并且促进对其的各种电子和/或自动控制。控制器642与uav 102的控制器142(图1中所示)基本类似。
84.在示例性实施例中,材料分配系统612是干材料分配系统,并且包括用于将材料从储存容器604分配到目标位置(例如,田地)的散布器650。使用任何合适的机械连接,比如经由螺纹连接、卡扣配合连接等,将散布器650联接到储存容器604。在如图17和图18中,散布器650被实施为包括可旋转盘654的水平散布器652。盘654的内部空腔(未示出)与储存容器604连通联接,使得材料从储存容器604流入盘654中。在操作中,使盘654旋转(例如,使用由控制系统642操作的未示出的马达),以将材料从其中分配到目标位置上。
85.现在转向图19和图20,更详细地示出了柔性储存容器604。柔性储存容器604包括本体702和嘴部704。在示例性实施例中,储存容器604的本体702是薄壁的并且由柔性可变形材料构成,比如高密度聚乙烯(hdpe)、低密度聚乙烯(ldpe)、聚酯或聚对苯二甲酸乙二酯(pete)、聚碳酸酯、生物塑料等。在一些实施例中,本体702是由比嘴部704更薄或更柔性的材料形成的,使得嘴部704比本体702更刚性。在至少一些实施例中,储存容器604可以使用注射吹塑工艺由聚合树脂材料(例如,低线密度树脂)形成。在这些实施例中,本体702和/或嘴部704的厚度可以基于用于形成本体702和/或嘴部704的树脂材料的量来控制。在一些实施例中,储存容器604可以使用热封工艺由层压材料和/或膜材料形成。可以将层压材料和/或膜材料的片材操纵成储存容器604的期望形状并热密封。在这些实施例中,本体702和/或嘴部704的厚度可以基于用于形成本体702和/或嘴部704的膜/层压材料的相对厚度来控制。
86.本体702包括基部706(例如,本体702的与嘴部704相反的一端)和侧壁708。侧壁708可以是至少部分半透明的或透明的,使得可以透过该侧壁看到储存容器604的内容物。替代地,侧壁708可以是不透明的。基部706和侧壁708至少部分地限定用于容纳要由材料分配系统612分配的材料的空腔710。储存容器604被配置为容纳可流动化学产品(未示出),比如液体、可流动颗粒或可流动粉末。
87.在所示实施例中,基部706包括在第一水平或非成角度部分714与第二水平部分716之间延伸的角度部分712。角度部分712从第一水平部分714到第二水平部分716向内(例如,朝向嘴部704)成角度。在此实施例中,储存容器604的基部706因此限定了切口或口袋718,使得储存容器604可以容纳电源640、控制系统642和/或uav 602的定位在uav机身606的底部上的其他部件。在其他实施例中,基部706可以是完全平坦的或水平的,或者可以具有任何其他形状。
88.在示例性实施例中,储存容器604从基部706朝向嘴部704逐渐变细,以将储存容器604内的材料朝向嘴部704汇集。具体地,侧壁708包括基本上围绕整个储存容器604延伸的角度部分720。角度部分720相对于水平面724限定角度722。特定角度722可以被选择为至少
与储存在储存容器604中的材料的休止角一样大,使得材料将在重力作用下沿着角度722从储存容器604流出。在一些实施例中,角度722是在约40
°
与约60
°
之间,或在约50
°
与约60
°
之间,或为约55
°
。
89.在示例性实施例中,储存容器604被配置为容纳干燥的可流动产品(例如,可流动颗粒或粉末)。嘴部704是单个孔口,该孔口既作为用于将干燥的可流动产品接收到储存容器604中的入口起作用,又作为用于将干燥的可流动产品供应到材料分配系统612的出口起作用。在替代性实施例中,储存容器604包括两个单独的孔口,其中一个作为入口起作用并且其中一个作为出口起作用。
90.在一个实施例中,储存容器604被配置为在填充取向(未示出)下通过嘴部704接收材料。为了从储存容器604分配材料(例如,可流动颗粒或粉末),储存容器604被倒置成分配取向726,如图19和图20所示。在分配取向726下,储存容器604被配置为通过嘴部704分配材料。在示例性实施例中,如图17和图18所示,储存容器604安装到uav机身606并呈倒置的分配取向726联接到材料分配系统612。在倒置的分配取向726下,干燥的可流动产品在重力作用下通过嘴部704分配到材料分配系统612。
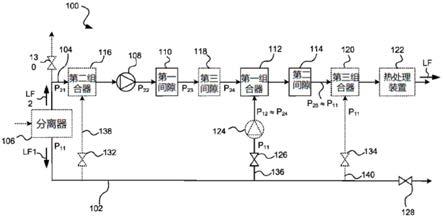
91.图21图示了第一示例性材料分配系统612,该系统包括实施为旋转散布器800的散布器650。旋转散布器800包括入口802、出口804、马达806和由马达806驱动以围绕旋转轴线810旋转的旋转分配器808。旋转散布器800的入口802联接到储存容器604的嘴部704,使得储存容器604内的材料(例如,干燥的可流动产品)将从嘴部704分配到入口802。入口802与出口804连通联接,使得材料将进一步从入口802分配到出口804并分配到目标位置上。
92.在所示实施例中,旋转分配器808,在图22中更详细地示出,定位在入口802与出口804之间并被配置为控制材料从出口804的分配。旋转分配器808包括围绕其外边缘814定位的多个口袋812。口袋812被配置为当材料通过入口802分配到第一位置816(对应于旋转分配器808的顶部818)时,在其中接收材料。当马达806使旋转分配器808旋转时,容纳在口袋812内的材料沿着旋转分配器的外边缘814移动。一旦口袋812到达第二位置820(对应于旋转分配器808的底部822),其中的材料从口袋812中排出并通过出口804。相应地,旋转分配器808控制或计量从旋转散布器800分配的材料的量。
93.图23至图25图示了另一个示例性材料分配系统612,该系统包括实施为空气散布器900的散布器650。空气散布器900包括入口902、出口904和从入口902延伸到出口904的通道906。在示例性实施例中,通道906被多个壁或翅片910分成多个子通道908。出口904同样被分成相应的多个子出口912。通道906部分地由从出口904到入口902向上成角度的底部壁914限定。底部壁914部分地限定了冲压空气入口916,该冲压空气入口被配置为通过其将空气吸入子通道908中。底部壁914可以选择性地移动以增加或减少冲压空气入口916的面积。冲压空气916进一步由成角度的入口壁918限定。
94.空气散布器900的入口902联接到储存容器604的嘴部704,使得材料(例如,干燥的可流动产品)可以从储存容器604流到空气散布器900。在所示实施例中,入口902包括门920,该门可以选择性地打开和关闭以发起或终止将材料从储存容器604分配到空气散布器900。在操作中,门920被打开以允许材料流过入口902。当uav朝向前方向飞行时,通过冲压空气入口916吸入空气,从而产生文丘里效应,使得在入口902附近生成相对较低的压力区域,以促进材料从储存容器604流入空气散布器900中。通过冲压空气入口916接收的空气进
一步促进控制材料通过子通道908的分布和分配。
95.现在参考图26,图示了使用或操作图1至图5中所示的空中材料输送系统100的方法1000的流程图。在一些实施例中,方法1000,包括其一个或多个步骤,可以应用于图17和图18中所示的空中材料输送系统。方法1000包括提供1002容纳可流动化学产品的可折叠储存容器。储存容器包括至少一个联接器。方法1000还包括将储存容器可释放地安装1004到无人驾驶飞行器(uav)、以及使用至少一个联接器将储存容器联接1006到安装到uav的材料分配系统。方法1000还包括使用材料分配系统从uav分配1008可流动化学产品。
96.在一些实施例中,安装1004包括使用联接到uav的机身的框架将储存容器可释放地安装1004到uav。方法1000进一步可以包括将框架可移除地联接到uav机身。
97.在一些实施例中,分配1008包括:操作uav使得uav飞过田地;以及在uav飞过田地的同时从uav分配1008可流动化学产品,使得将可流动化学产品施加到田地。
98.图27图示了使用或操作图1至图5中所示的空中材料输送系统100的另一种方法1100。在一些实施例中,方法1100,包括其一个或多个步骤,可以应用于图17和图18中所示的空中材料输送系统。方法1100包括将液体引入1102到容纳预定剂量的化学产品的可折叠液体储存容器中以形成液体混合物。该液体储存容器包括至少一个流体联接器。方法1100还包括将液体储存容器可释放地安装1104到无人驾驶飞行器(uav)、以及使用至少一个流体联接器将液体储存容器流体联接1106到安装到uav的液体分配系统。方法1100进一步包括使用液体分配系统从uav分配1108液体混合物。
99.在一些实施例中,引入1102包括将可折叠液体储存容器填充到填充线指示符,该填充线指示符对应于实现液体混合物的预定浓度所需的液体容器的液体填充水平。
100.在一些实施例中,至少一个流体联接器包括单个流体联接器,并且引入1102包括经由流体联接器将液体引入1102到液体储存容器中。联接1106可以包括经由同一流体联接器将液体储存容器流体联接到液体分配系统。
101.在一些实施例中,安装1104包括使用联接到uav的机身的框架将液体储存容器可释放地安装1104到uav。方法1100进一步可以包括将框架可移除地联接到uav机身。
102.在一些实施例中,分配1108包括:操作uav使得uav飞过田地;以及在uav飞过田地的同时从uav分配1108液体混合物,使得将液体混合物施加到田地。
103.应当理解,本文所述的实施例和方法不限于空中材料输送系统。例如,本文所述的材料输送系统的特征和部件可以与基于地面的材料输送系统一起使用或以其他方式实现在基于地面的材料输送系统上,比如基于背包的材料输送系统。
104.图28至图31图示了根据本披露内容的另一实施例的基于地面的材料输送系统1200的一个示例性实施例。在示例性实施例中,基于地面的材料输送系统1200包括框架1202和安装到其上的可折叠储存容器1204。框架1202联接到包括至少一个肩带1207的背包组件1205(广义地,可穿戴或人便携式携带设备,如图31中所示),使得基于地面的材料输送系统1200可以被携带并且由人工操作员操作。在所示实施例中,背包组件1205包括一对肩带1207和腰带1209,用于将背包组件1205固定到用户的躯干上,但是背包组件1205可以具有使基于地面的输送系统1200如本文所述起作用的任何其他合适的配置。在其他实施例中,例如,背包组件1205可以包括单个肩带1207和/或可以不包括腰带1209。
105.储存容器1204包括容纳在其中的可流动化学材料(未示出),以使用基于地面的材
料输送系统1200进行分配。储存容器1204可以与图1至图16中所示的储存容器104和/或图17至图20所示的储存容器604基本类似。
106.在示例性实施例中,储存容器1204可释放地或可移除地安装到框架1202。在示例性实施例中,框架1202具有顶部1206、底部1208和在顶部1206与底部1208之间延伸的多个侧面1210。框架顶部1206为储存容器1204提供安装位置,使得储存容器1204可以从框架1202悬挂。在一些实施例中,框架1202包括一个或多个机械联接器1212,以用于将储存容器1204联接到其上。例如,框架1202包括钩子(例如,一对钩子),这些钩子联接到框架顶部1206并且被配置为接收储存容器1204。框架可以包括联接到框架1202的任何部分的任何合适的机械联接器1212,比如卡扣、按钮、螺栓等。此外,框架1202中可以包括一个或多个孔,该一个或多个孔作为机械联接器1212(例如,用于接收钩子等)起作用。在示例性实施例中,储存容器包括至少一个机械联接器1214,该至少一个机械联接器被配置用于可释放地联接到框架1202。储存容器1204的至少一个机械联接器1214可以包括例如但不限于索环、钩子、按钮、卡扣、夹子、夹具和/或螺栓。在示例性实施例中,机械联接器1214包括一对索环1216,这对索环被配置用于联接到框架1202的机械联接器1212(例如,一对钩子)。
107.用于从储存容器1204分配材料的材料分配系统(未具体示出)联接到背包组件1205和储存容器1204。材料分配系统可以是液体材料分配系统或干材料分配系统,该系统被配置为分配可流动或可倾倒的材料,比如液体或非气态流体、颗粒和/或粉末。材料分配系统可以类似于液体材料分配系统112(图1至图5中所示)和/或可以类似于干材料分配系统612(图17、图18和图21至图25中所示)。因此,尽管泵1218被示出为作为材料分配系统的一部分而联接到储存容器1204,但应该容易理解,对于材料分配系统的某些实现方式而言可能不需要泵。附加地或替代地,材料分配系统可以包括一个或多个手持棒、涂抹器或小吊杆,用于手动施加材料。
108.储存容器1204可释放地安装到框架1202。当储存容器1204安装到框架1202时,储存容器1204处于倒置的分配取向1220。从储存容器1204分配的材料在重力作用下通过材料分配系统排出到目标(例如,田地)上。
109.本披露的化学品和材料输送系统适合于与多种化学产品一起使用,这些化学产品包括例如但不限于,农用化学品如肥料、杀昆虫剂、杀真菌剂、杀线虫剂、杀细菌剂、杀螨剂、除草剂、除草剂安全剂、生长调节剂如昆虫蜕皮抑制剂和生根刺激剂、化学不育剂、化学信息素、驱虫剂、引诱剂、信息素、取食刺激剂、其他生物活性化合物或昆虫病原细菌、病毒或真菌,以形成多组分杀有害生物剂。
110.在某些实施例中,化学产品包括包含以下各项的组合物:(a)至少一种具有式i或式ii的化合物、或前述化合物的组合,以及含有它们的组合物:
[0111][0112]
其中n是0、1或2;或者
[0113][0114]
其中r是ch3或cf2h;
[0115]
或前述化合物的组合;和
[0116]
(b)至少一种不同于具有式i的化合物或具有式ii的化合物的额外的有害生物防治剂。
[0117]
可以与本披露的化学品和材料输送系统一起使用的合适的化学产品的实施例包括但不限于下面描述的那些。
[0118]
实施例1.一种具有式i的化合物。
[0119]
实施例2.一种具有式i的化合物,其中n是0、1或2。
[0120]
实施例3.一种具有式i的化合物,其中n是0。
[0121]
实施例4.一种具有式i的化合物,其中n是1。
[0122]
实施例5.一种具有式i的化合物,其中n是2。
[0123]
实施例6.一种具有式ii的化合物,其中r是ch3或cf2h
[0124]
实施例7.一种具有式ii的化合物,其中r是ch3。
[0125]
实施例8.一种具有式ii的化合物,其中r是cf2h。
[0126]
实施例9.一种组合物,其包含至少一种根据实施例1-8中任一项所述的化合物,或前述化合物的组合。
[0127]
实施例10.根据实施例1-9中任一项所述的组合物,和至少一种不同于具有式i或式ii的化合物的额外的生物活性化合物或有害生物防治剂。
[0128]
实施例11.根据实施例1-10中任一项所述的组合物,和至少一种选自以下的额外的组分:表面活性剂、固体稀释剂以及液体稀释剂。
[0129]
实施例12.根据实施例1-11中任一项所述的组合物,至少一种额外的生物活性化合物或有害生物防治剂,和至少一种选自以下的额外的组分:表面活性剂、固体稀释剂以及液体稀释剂。
[0130]
实施例13.根据实施例9-12中任一项所述的组合物,其中具有式i或ii的化合物选自n-[1,1-二甲基-2-(甲硫基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、n-[1,1-二甲基-2-(甲基亚磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、n-[1,1-二甲基-2-(甲基磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、n-(1-甲基环丙基)-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、以及n-[1-(二氟甲基)环丙基]-2-(3-吡啶基)-2h-吲唑-4-甲酰胺;或前述化合物的任何组合。
[0131]
实施例14.根据实施例9-12中任一项所述的组合物,其中具有式i或ii的化合物选自n-[1,1-二甲基-2-(甲硫基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、n-[1,1-二甲基-2-(甲基亚磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、以及n-[1,1-二甲基-2-(甲基磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺。
[0132]
实施例15.根据实施例9-12中任一项所述的组合物,其中具有式i或ii的化合物选自n-(1-甲基环丙基)-2-(3-吡啶基)-2h-吲唑-4-甲酰胺、以及n-[1-(二氟甲基)环丙基]-2-(3-吡啶基)-2h-吲唑-4-甲酰胺。
[0133]
实施例16.根据实施例10-15中任一项所述的组合物,其中该有害生物防治化合物或试剂选自杀昆虫剂、杀真菌剂、杀线虫剂、以及杀细菌剂,或前述的组合。
[0134]
实施例17.根据实施例10-16中任一项所述的组合物,其中该有害生物防治化合物或试剂是杀昆虫剂。
[0135]
实施例18.根据实施例10-16中任一项所述的组合物,其中该有害生物防治化合物或试剂是杀真菌剂。
[0136]
实施例17.根据实施例10-16中任一项所述的组合物,其中该有害生物防治化合物或试剂是杀线虫剂。
[0137]
实施例18.根据实施例10-16中任一项所述的组合物,其中该有害生物防治化合物或试剂是杀细菌剂。
[0138]
实施例19.根据实施例10-18中任一项所述的组合物,其中该至少一种额外的生物活性化合物或试剂选自阿巴美丁、高灭磷、灭螨醌、啶虫脒、氟丙菊酯、阿赛纳洛必(acynonapyr)、啶喃环丙虫酯(afidopyropen)([(3s,4r,4ar,6s,6as,12r,12as,12bs)-3-[(环丙基羰基)氧基]-1,3,4,4a,5,6,6a,12,12a,12b-十氢-6,12-二羟基-4,6a,12b-三甲基-11-氧代-9-(3-吡啶基)-2h,11h-萘并[2,1-b]吡喃并[3,4-e]吡喃-4-基]甲基环丙烷甲酸酯)、磺胺螨酯、双甲脒、阿维菌素、印楝素、谷硫磷、丙硫克百威、杀虫磺、苯并吡咯烷(benzpyrimoxan)、联苯菊酯、k-联苯菊酯、联苯肼酯、双三氟虫脲、硼酸盐、溴虫氟苯双酰胺、噻嗪酮、硫线磷、甲萘威、克百威、杀螟丹、伐虫脒、氯虫苯甲酰胺、溴虫腈、定虫隆、反式氯炔丙菊酯(chloroprallethrin)、毒死蜱、乙基毒死蜱、甲基毒死蜱、环虫酰肼、螨死净
a]嘧啶鎓内盐)、杀虫隆、噻氯吡唑啉(tyclopyrazoflor)、ζ-氯氰菊酯、苏云金芽孢杆菌δ-内毒素、昆虫病原细菌、昆虫病原病毒、以及昆虫病原真菌。
[0139]
实施例20.根据实施例10-19中任一项所述的组合物,其中该至少一种额外的生物活性化合物或有害生物防治剂选自额外的生物活性有害生物防治化合物或试剂,其中该至少一种额外的生物活性化合物或试剂选自氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、或茚虫威。阿维菌素、芽孢杆菌、其任何活性晶体蛋白、噻嗪酮、克百威、溴虫腈、毒死蜱、噻虫胺、灭蝇胺、丁醚脲、呋虫胺、甲维盐、氟虫腈、氟啶虫酰胺、氟吡呋喃酮、灭多虫甲氧虫酰肼、双苯氟脲、扑灭司林、吡丙醚、砜虫啶、噻虫嗪、γ-三氟氯氰菊酯、或ζ-氯氰菊酯、溴虫氟苯双酰胺、嗪虫唑酰胺、异噁唑虫酰胺、四氯虫酰胺、噁唑磺基、噻氯吡唑啉、氟吡吡啉、甲氧哌啶乙酯、阿赛纳洛必、苯并吡咯烷、反式氯炔丙菊酯、ε-甲氧苄氟菊酯、k-联苯菊酯、二氯噻吡嘧啶(dicloromezotiaz)、以及k-七氟菊酯。
[0140]
实施例21.根据实施例10-20中任一项所述的组合物,其中该至少一种额外的生物活性化合物或试剂选自氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0141]
实施例22.根据实施例10-21中任一项所述的组合物,其中该具有式i或式ii的化合物是n-[1,1-二甲基-2-(甲硫基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺并且其中该至少一种额外的生物活性化合物或有害生物防治剂是选自以下中的至少一种:氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0142]
实施例23.根据实施例10-21中任一项所述的组合物,其中该具有式i或式ii的化合物是n-[1,1-二甲基-2-(甲基亚磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺并且其中该至少一种额外的生物活性化合物或有害生物防治剂是选自以下中的至少一种:氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0143]
实施例24.根据实施例10-21中任一项所述的组合物,其中该具有式i或式ii的化合物是n-[1,1-二甲基-2-(甲基磺酰基)乙基]-7-氟-2-(3-吡啶基)-2h-吲唑-4-甲酰胺并且其中该至少一种额外的生物活性化合物或有害生物防治剂是选自以下中的至少一种:氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0144]
实施例25.根据实施例10-21中任一项所述的组合物,其中该具有式i或式ii的化合物是n-(1-甲基环丙基)-2-(3-吡啶基)-2h-吲唑-4-甲酰胺并且其中该至少一种额外的生物活性化合物或有害生物防治剂是选自以下中的至少一种:氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0145]
实施例26.根据实施例10-21中任一项所述的组合物,其中该具有式i或式ii的化合物是n-[1-(二氟甲基)环丙基]-2-(3-吡啶基)-2h-吲唑-4-甲酰胺并且其中该至少一种额外的生物活性化合物或有害生物防治剂是选自以下中的至少一种:氰虫酰胺、啶虫脒、吡虫啉、螺虫乙酯、氯虫苯甲酰胺、联苯菊酯、以及茚虫威。
[0146]
实施例27.根据实施例10-26中任一项所述的组合物,其中该具有式i的化合物或该具有式ii的化合物与该至少一种额外的生物活性化合物或有害生物防治剂组分的重量比是从10000:1至1:50。
[0147]
实施例28.根据实施例10-26中任一项所述的组合物,其中该具有式i的化合物或该具有式ii的化合物与该至少一种额外的生物活性化合物或有害生物防治剂组分的重量
比是从100:1至1:10。
[0148]
实施例29.根据实施例10-26中任一项所述的组合物,其中该具有式i的化合物或该具有式ii的化合物与该至少一种额外的生物活性化合物或有害生物防治剂组分的重量比是从1:50至5:1。
[0149]
实施例30.根据实施例9-29中任一项所述的组合物,其进一步包含至少一种选自以下的额外的组分:表面活性剂、固体稀释剂、以及液体稀释剂。
[0150]
实施例31.根据实施例9-30中任一项所述的组合物,其进一步包含液体肥料。
[0151]
实施例32.根据实施例31所述的组合物,其中该液体肥料是水基的。
[0152]
实施例33.一种土壤浸液配制品,其包含根据实施例9-32中任一项所述的组合物。
[0153]
实施例34.一种喷雾组合物,其包含根据实施例9-32中任一项所述的组合物。
[0154]
实施例35.一种饵料组合物,其包含根据实施例9-32中任一项所述的组合物。
[0155]
实施例36.根据实施例35所述的饵料组合物,其进一步包含一种或多种食物材料。
[0156]
实施例37.根据实施例35或36所述的饵料组合物,其进一步包含引诱剂。
[0157]
实施例38.根据实施例35-37中任一项所述的饵料组合物,其进一步包含湿润剂。
[0158]
实施例39.根据实施例9-30中任一项所述的组合物,其中该组合物是选自以下的固体组合物:粉剂、粉末、颗粒剂、球剂、粒料、锭剂、片剂、以及填充膜。
[0159]
实施例40.根据实施例39所述的组合物,其中该固体组合物是水可分散性的或水溶性的。
[0160]
实施例41.一种液体或干燥配制品,其包含根据实施例9-32或39-40中任一项所述的组合物,用于滴灌系统或种植期间的垄沟中。
[0161]
实施例42.一种经处理的种子,其包含按处理前该种子的重量计从约0.0001%至1%的量的根据实施例9-32或39-40中任一项所述的组合物。
[0162]
尽管本披露内容的各种实施例的具体特征可能在一些附图中而不在其他附图中示出,但这仅是为了方便。根据本披露内容的原理,可以结合任何其他附图的任何特征来引用和/或要求附图的任何特征。
[0163]
该书面描述使用示例来说明本披露内容,包括最佳模式,并且还使本领域的任何技术人员能够实践本披露内容,包括制造和使用任何设备或系统以及执行任何结合的方法。本披露内容的专利范围由权利要求限定,并且可以包括本领域技术人员想到的其他示例。如果这类其他示例具有与权利要求的字面语言没有区别的结构元素,或者如果它们包括与权利要求的字面语言没有实质性差异的等效结构元素,则它们旨在处于权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。