1.本发明涉及基于机器人的生产加工领域,尤其涉及一种高速机器人的生产工艺及装置。
背景技术:
2.为了降低煤炭的使用,减小环境污染,现有技术提出一种生物质燃料块,其由椰子壳、淀粉和水组成,现有设备生产此类生物质燃料块时,先将椰子壳破碎成小块,然后将小块椰子壳、淀粉和水加热搅拌得到粘稠混合物,再对粘稠混合物烘干得到生物质燃料块,为了提高生物质燃料块的燃烧效率,一般会在生物质燃料块上开设若干个通孔,提高氧气接触面积,而小块椰子壳的硬度相对较大,同时淀粉的硬度相对小,导致打孔过程中硬度较小的淀粉无法对硬度较大的椰子壳提供足够的应力,从而使钻孔过程中钻头拨动椰子壳运动,椰子壳拨动淀粉运动,从而将淀粉拨散,大大降低生物质燃料块的结构稳定性,甚至生物质燃料块出现崩裂的现象。
3.因此,需要研发一种高速机器人的生产工艺及装置。
技术实现要素:
4.为了克服现有设备在生物质燃料块上开设通孔提高燃烧效率时,硬度较小的淀粉无法对硬度较大的椰子壳提供足够的应力,从而使钻孔过程中钻头拨动椰子壳运动,椰子壳拨动淀粉运动,大大降低生物质燃料块的结构稳定性的缺点,本发明提供一种高速机器人的生产工艺及装置。
5.本发明的技术实施方案是:一种高速机器人的生产工艺,包括以下工作步骤:
6.s1:破碎,将椰子壳破碎成小块;
7.s2:混合,将s1制得的小块椰子壳、淀粉和水混合在一起得到混合物;
8.s3:加热搅拌,对s2中的混合物进行加热搅拌,得到粘稠混合物;
9.s4:上料,将s3中制得的粘稠混合物倒入至特定模具中,通过振动将粘稠混合物填满模具,避免出现空包现象,并使粘稠混合物中部形成六个长圆孔;
10.s5:成型,将粘稠混合物六个长圆孔的孔径扩大,然后将其烘干成型,避免出现粘连现象,制得生物质燃料块;
11.s6:摆料,将s5制得的生物质燃料块取出并放入至收纳框中。
12.一种高速机器人的生产装置,包括有工作台、支撑板、机械臂、电动夹具、第一长管、第二长管、圆杆、承接组件、成型组件和清理组件;工作台上侧后部固接有支撑板;工作台上侧右部安装有机械臂;机械臂左部安装有电动夹具;支撑板前侧下部安装有具有防止出现空包现象功能的承接组件;支撑板前侧上部安装有成型组件;成型组件中部安装有六个第一长管,并且六个第一长管为环形阵列设置;六个第一长管外侧均套设有一个第二长管;第一长管和第二长管上均开设有若干个通孔,并且第一长管和第二长管的通孔相互错开;每个第二长管外环面均固接有若干个圆杆;将粘稠混合物倒入至承接组件中,通过第一
长管、第二长管和圆杆相配合对粘稠混合物圆周拨动限位,成型组件对粘稠混合物进行烘干,使粘稠混合物成型后内部形成六个长圆孔;成型组件与承接组件相接触;支撑板前侧上部安装有清理组件,并且清理组件位于成型组件外侧;通过成型组件和清理组件相配合将残留在热气循环路径上的杂质清除。
13.作为更进一步的优选方案,承接组件包括有第一连接板、第一圆筒、第一弹力伸缩杆、第二圆筒、第一伸缩气缸、半圆筒、第一联动集合、第一驱动集合和第二联动集合;支撑板前侧下部固接有第一连接板;第一连接板内部转动连接有第一圆筒;第一圆筒上侧固接有若干个第一弹力伸缩杆;多个第一弹力伸缩杆的伸缩端之间固接有一个第二圆筒;第二圆筒内侧左部和内侧右部均固接有一个第一伸缩气缸;两个第一伸缩气缸的伸缩端均固接有一个半圆筒;两个半圆筒相接触;第一连接板上侧安装有第一联动集合;第一连接板上侧安装有第一驱动集合和,并且第一驱动集合位于第一联动集合下方;两个半圆筒下侧安装有第二联动集合。
14.作为更进一步的优选方案,第一联动集合包括有联动环、第一联动块、第一连接块、连接环和第二联动块;第二圆筒外侧下部固接有联动环;联动环下侧固接有若干个第一联动块,并且若干个第一联动块为环形阵列设置;第一连接板上侧左部和上侧右部均固接有一个第一连接块;两个第一连接块上侧之间固接有一个连接环;连接环上侧固接有若干个第二联动块,并且若干个第二联动块为环形阵列设置。
15.作为更进一步的优选方案,第二联动集合包括有第二连接块、第二弹力伸缩杆和底板;两个半圆筒下部均固接有一个第二连接块;两个第二连接块下部均固接有一个第二弹力伸缩杆;两个第二弹力伸缩杆的伸缩端均固接有一个底板;两个底板分别与相邻的半圆筒滑动连接;两个底板相接触。
16.作为更进一步的优选方案,成型组件包括有第二驱动集合、第二连接板、连接杆、第三连接板、隔板、清理集合、第三驱动集合和烘干集合;支撑板前侧上部安装有第二驱动集合;第二驱动集合前侧下部安装有第二连接板;第二连接板上侧中部固接有四个连接杆;四个连接杆上部之间固接有一个第三连接板;第三连接板下侧与六个第一长管固接;六个第一长管内侧均固接有一个隔板,六个隔板均与第三连接板固接;六个隔板下端安装有清理集合;第三连接板下侧中部安装有第三驱动集合;第二连接板上侧安装有烘干集合。
17.作为更进一步的优选方案,清理集合包括有第三弹力伸缩杆、遮挡块和第三联动块;六个隔板下侧中部均固接有一个第三弹力伸缩杆;六个第三弹力伸缩杆的伸缩端均固接有一个遮挡块;遮挡块上侧与相邻的第二长管相接触;遮挡块上侧与相邻的第一长管相接触;遮挡块外侧与相邻的圆杆相接触;六个遮挡块离心侧均固接有一个第三联动块,六个第三联动块为环形阵列设置。
18.作为更进一步的优选方案,烘干集合包括有热循环气箱、第一管道、环形舱体、第二管道、第三管道、圆形舱体和第四管道;第二连接板上侧前部固接有热循环气箱;热循环气箱输出端连通有第一管道;四个第三连接板上部之间固接有环形舱体;第一管道与环形舱体相连通;环形舱体内侧连通有六个环形舱体第二管道;六个第二管道下端均穿过第三连接板;第二管道与相邻的第一长管相连通;第三连接板上贯穿设置有六个第三管道,六个第三管道与相邻的第一长管相连通;六个第三管道上端之间连通有一个圆形舱体;圆形舱体上部连通有第四管道;第四管道前端与热循环气箱输入端相连通。
19.作为更进一步的优选方案,清理组件包括有第四连接块、第二伸缩气缸、第四联动块、第一限位块和第二限位块;支撑板前侧上部固接有两个第四连接块;两个第四连接块前部均固接有一个第二伸缩气缸;两个第二伸缩气缸的伸缩端均固接有一个第四联动块;两个第四联动块内侧均固接有两个第一限位块;两个第四联动块内侧均固接有两个第二限位块。
20.作为更进一步的优选方案,还包括有收集组件,支撑板前侧下部安装有收集组件,收集组件包括有第五连接块、第二电动滑轨、第二电动滑块、第五联动块和收纳筒;支撑板前侧下部固接有第五连接块;第五连接块前侧固接有第二电动滑轨;第二电动滑轨上滑动连接有第二电动滑块;第二电动滑块前侧固接有第五联动块;第五联动块前侧固接有收纳筒。
21.本发明具有以下优点:使用时通过六个第二长管对成型固化前的粘稠混合物进行限位,从而使固化成型后的粘稠混合物中自然形成六个长圆孔,避免了后续打孔产生的诸多问题,并且通过第二长管带动圆杆进行圆周运动将长圆孔的孔径扩大,避免混合物固化后粘接在第二长管表面,从而避免了难以将固化后的混合从第二长管上取出的问题;
22.通过第一联动块和第二联动块相配合使两个半圆筒进行振动,使粘稠混合物将两个半圆筒内部空腔填满,避免成型后的生物至内部出现空包现象;
23.通过第二限位块对向上运动的第三联动块进行阻挡限位,将遮挡块打开,从而将残留在第一长管中的杂质清除,避免杂质将热气循环路径堵塞,从而避免影响后续烘干工序。
附图说明
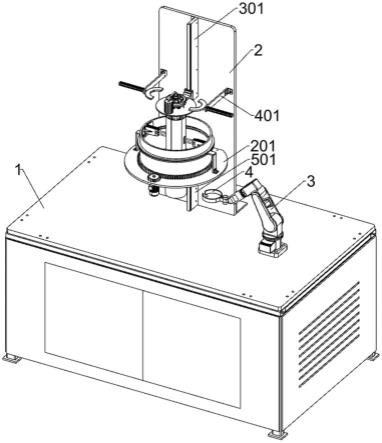
24.图1是本发明高速机器人的生产装置的第一种结构示意图;
25.图2是本发明高速机器人的生产装置的第二种结构示意图;
26.图3是本发明承接组件的结构示意图;
27.图4是本发明承接组件的第一种部分结构示意图;
28.图5是本发明承接组件的第二种部分结构示意图;
29.图6是本发明承接组件的第三种部分结构示意图;
30.图7是本发明成型组件的结构示意图;
31.图8是本发明成型组件的第一种部分结构示意图;
32.图9是本发明成型组件的第二种部分结构示意图;
33.图10是本发明成型组件的第三种部分结构示意图;
34.图11是本发明成型组件的第四种部分结构示意图;
35.图12是本发明清理组件部分结构的俯视图;
36.图13是本发明收集组件的结构示意图。
37.附图标号:1-工作台,2-支撑板,3-机械臂,4-电动夹具,201-第一连接板,202-第一圆筒,203-第一弹力伸缩杆,204-第二圆筒,205-第一伸缩气缸,206-半圆筒,207-联动环,208-第一联动块,209-第一连接块,2010-连接环,2011-第二联动块,2012-第一电机,2013-第一直齿轮,2014-第一齿环,2015-第二连接块,2016-第二弹力伸缩杆,2017-底板,301-支撑架,302-第一电动滑轨,303-第一电动滑块,304-第三连接块,305-第二连接板,
306-连接杆,307-第三连接板,308-第一长管,309-隔板,3010-第二长管,3011-圆杆,3012-第三弹力伸缩杆,3013-遮挡块,3014-第三联动块,3015-第二电机,3016-第二直齿轮,3017-第二齿环,3018-热循环气箱,3019-第一管道,3020-环形舱体,3021-第二管道,3022-第三管道,3023-圆形舱体,3024-第四管道,401-第四连接块,402-第二伸缩气缸,403-第四联动块,404-第一限位块,405-第二限位块,501-第五连接块,502-第二电动滑轨,503-第二电动滑块,504-第五联动块,505-收纳筒。
具体实施方式
38.下面结合附图和实施例对本发明作进一步的说明。
39.实施例1
40.一种高速机器人的生产装置,如图1-6所示,包括有工作台1、支撑板2、机械臂3、电动夹具4、第一长管308、第二长管3010、圆杆3011、承接组件、成型组件和清理组件;工作台1上侧后部螺栓连接有支撑板2;工作台1上侧右部安装有机械臂3;机械臂3左部安装有电动夹具4;支撑板2前侧下部安装有承接组件;支撑板2前侧上部安装有成型组件;成型组件中部安装有六个第一长管308,并且六个第一长管308为环形阵列设置;六个第一长管308外侧均套设有一个第二长管3010;第一长管308和第二长管3010上均开设有若干个通孔,并且第一长管308和第二长管3010的通孔相互错开;每个第二长管3010外环面均固接有若干个圆杆3011;成型组件与承接组件相接触;支撑板2前侧上部安装有清理组件,并且清理组件位于成型组件外侧。
41.承接组件包括有第一连接板201、第一圆筒202、第一弹力伸缩杆203、第二圆筒204、第一伸缩气缸205、半圆筒206、第一联动集合、第一驱动集合和第二联动集合;支撑板2前侧下部螺栓连接有第一连接板201;第一连接板201内部转动连接有第一圆筒202;第一圆筒202上侧固接有若干个第一弹力伸缩杆203;多个第一弹力伸缩杆203的伸缩端之间固接有一个第二圆筒204;第二圆筒204内侧左部和内侧右部均固接有一个第一伸缩气缸205;两个第一伸缩气缸205的伸缩端均固接有一个半圆筒206;两个半圆筒206相接触;第一连接板201上侧安装有第一联动集合;第一连接板201上侧安装有第一驱动集合和,并且第一驱动集合位于第一联动集合下方;两个半圆筒206下侧安装有第二联动集合。
42.第一联动集合包括有联动环207、第一联动块208、第一连接块209、连接环2010和第二联动块2011;第二圆筒204外侧下部焊接有联动环207;联动环207下侧焊接有若干个第一联动块208,并且若干个第一联动块208为环形阵列设置;第一连接板201上侧左部和上侧右部均螺栓连接有一个第一连接块209;两个第一连接块209上侧之间焊接有一个连接环2010;连接环2010上侧焊接有若干个第二联动块2011,并且若干个第二联动块2011为环形阵列设置。
43.第一驱动集合包括有第一电机2012、第一直齿轮2013和第一齿环2014;第一连接板201下侧前部固接有第一电机2012;第一电机2012的输出端固接有第一直齿轮2013;第一圆筒202外侧下部固接有第一齿环2014;第一直齿轮2013与第一齿环2014相啮合。
44.第二联动集合包括有第二连接块2015、第二弹力伸缩杆2016和底板2017;两个半圆筒206下部均螺栓连接有一个第二连接块2015;两个第二连接块2015下部均固接有一个第二弹力伸缩杆2016;两个第二弹力伸缩杆2016的伸缩端均固接有一个底板2017;两个底
板2017分别与相邻的半圆筒206滑动连接;两个底板2017相接触。
45.首先,将椰子壳破碎成小块,然后加入淀粉和水加热搅拌,得到含有小块椰子壳的粘稠混合物,然后将粘稠混合物倒入至两个半圆筒206中,启动第一电机2012,第一电机2012带动第一直齿轮2013往复转动,第一直齿轮2013带动第一齿环2014往复转动,第一齿环2014带动第一圆筒202往复转动,第一圆筒202带动第一弹力伸缩杆203运动,第一弹力伸缩杆203带动第二圆筒204运动,第二圆筒204带动联动环207往复转动,联动环207带动多个第一联动块208进行往复圆周运动,此过程中第二联动块2011对第一联动块208限位,使第一联动块208在第二联动块2011表面滑动时,第一联动块208会向上运动一定距离,第一联动块208带动联动环207向上运动,联动环207带动第二圆筒204向上运动,并对第一弹力伸缩杆203进行拉伸,当第一联动块208经过第二联动块2011时,第一弹力伸缩杆203回弹带动第二圆筒204运动回原位,从而使第二圆筒204进行往复转动的同时进行上下方向的小幅振动,第二圆筒204带动其上的零件运动,从而使两个半圆筒206进行上下方向的小幅振动,进而使粘稠混合物填满两个半圆筒206内部空腔,避免出现空包现象,从而避免影响产品品质,两个半圆筒206运动回原位,关闭第一电机2012。
46.实施例2
47.在实施例1的基础上,如图1和图7-13所示,成型组件包括有第二驱动集合、第二连接板305、连接杆306、第三连接板307、隔板309、清理集合、第三驱动集合和烘干集合;支撑板2前侧上部安装有第二驱动集合;第二驱动集合前侧下部安装有第二连接板305;第二连接板305上侧中部焊接有四个连接杆306;四个连接杆306上部之间固接有一个第三连接板307;第三连接板307下侧与六个第一长管308固接;六个第一长管308内侧均固接有一个隔板309,六个隔板309均与第三连接板307固接;六个隔板309下端安装有清理集合;第三连接板307下侧中部安装有第三驱动集合;第二连接板305上侧安装有烘干集合。
48.第二驱动集合包括有支撑架301、第一电动滑轨302、第一电动滑块303和第三连接块304;支撑板2前侧上部螺栓连接有支撑架301;支撑架301前侧固接有第一电动滑轨302;第一电动滑轨302上滑动连接有第一电动滑块303;第一电动滑块303前侧固接有第三连接块304;第三连接块304前部与第二连接板305固接。
49.清理集合包括有第三弹力伸缩杆3012、遮挡块3013和第三联动块3014;六个隔板309下侧中部均固接有一个第三弹力伸缩杆3012;六个第三弹力伸缩杆3012的伸缩端均固接有一个遮挡块3013;遮挡块3013上侧与相邻的第二长管3010相接触;遮挡块3013上侧与相邻的第一长管308相接触;遮挡块3013外侧与相邻的圆杆3011相接触;六个遮挡块3013离心侧均焊接有一个第三联动块3014,六个第三联动块3014为环形阵列设置。
50.第三驱动集合包括有第二电机3015、第二直齿轮3016和第二齿环3017;第三连接板307下侧中部固接有第二电机3015;第二电机3015的输出端固接有第二直齿轮3016;六个第二长管3010上端均固接有一个第二齿环3017;六个第二齿环3017均与第二直齿轮3016相啮合。
51.烘干集合包括有热循环气箱3018、第一管道3019、环形舱体3020、第二管道3021、第三管道3022、圆形舱体3023和第四管道3024;第二连接板305上侧前部固接有热循环气箱3018;热循环气箱3018输出端连通有第一管道3019;四个第三连接板307上部之间固接有环形舱体3020;第一管道3019与环形舱体3020相连通;环形舱体3020内侧连通有六个环形舱
体3020第二管道3021;六个第二管道3021下端均穿过第三连接板307;第二管道3021与相邻的第一长管308相连通;第三连接板307上贯穿设置有六个第三管道3022,六个第三管道3022与相邻的第一长管308相连通;六个第三管道3022上端之间连通有一个圆形舱体3023;圆形舱体3023上部连通有第四管道3024;第四管道3024前端与热循环气箱3018输入端相连通。
52.清理组件包括有第四连接块401、第二伸缩气缸402、第四联动块403、第一限位块404和第二限位块405;支撑板2前侧上部螺栓连接有两个第四连接块401;两个第四连接块401前部均固接有一个第二伸缩气缸402;两个第二伸缩气缸402的伸缩端均固接有一个第四联动块403;两个第四联动块403内侧均固接有两个第一限位块404;两个第四联动块403内侧均固接有两个第二限位块405。
53.还包括有收集组件,支撑板2前侧下部安装有收集组件,收集组件包括有第五连接块501、第二电动滑轨502、第二电动滑块503、第五联动块504和收纳筒505;支撑板2前侧下部螺栓连接有第五连接块501;第五连接块501前侧固接有第二电动滑轨502;第二电动滑轨502上滑动连接有第二电动滑块503;第二电动滑块503前侧固接有第五联动块504;第五联动块504前侧固接有收纳筒505。
54.两个半圆筒206进行振动时,半圆筒206带动第二连接块2015向上运动,第二连接块2015带动第二弹力伸缩杆2016向上运动,而底板2017被遮挡块3013阻挡无法向上运动,从而使第二连接块2015对第二弹力伸缩杆2016进行压缩,即振动过程中底板2017始终与遮挡块3013相接触,装填完成后,粘稠混合呈圆柱状,通过六个第二长管3010和六个遮挡块3013的限位作用,使粘稠混合物中部形成六个长圆孔,振动过程中底板2017始终与遮挡块3013相接触,避免粘稠混合物蔓延至遮挡块3013和底板2017之间的间隙中,从而避免长圆孔下部出现堵塞现象,进而避免燃烧效率;启动第二电机3015,第二电机3015带动第二直齿轮3016转动,第二直齿轮3016带动第二齿环3017转动,第二齿环3017带动第二长管3010转动,第二长管3010带动多个圆杆3011进行圆周运动,使圆周运动的圆杆3011对混合物长圆孔进行扩张,同时启动热循环气箱3018,热循环气箱3018将热气通过第一管道3019输送至环形舱体3020中,环形舱体3020中的热气通过第二管道3021流入至第一长管308一侧的空腔中,热气流动至空腔底部后,绕过隔板309流入至第一长管308另一侧空腔中,然后向上流入至第三管道3022中,再依次通过圆形舱体3023和第四管道3024流回至热循环气箱3018内部,从而形成热气流循环,对第一长管308和第二长管3010加热,然后第二长管3010将热量扩散至混合物长圆孔内壁,将长圆孔内壁处的进行烘干,从而使长圆孔内壁固化,此时混合物长圆孔的孔径大于第二长管3010的孔径,第二长管3010上的圆孔与第一长管308上的圆孔重叠后,关闭第二电机3015,循环流动的热气通过第一长管308和第二长管3010上的圆孔直接与混合物长圆孔内壁接触,大大提高烘干效率;当对混合物烘干完成后,制得生物质燃料块,然后启动第二电机3015,第二电机3015带动第二直齿轮3016转动,第二直齿轮3016带动第二齿环3017转动,第二齿环3017带动第二长管3010转动回初始位置,第二长管3010带动其上的零件运动回初始位置,关闭第二电机3015,然后第一电动滑块303在第一电动滑轨302上向上滑动,第一电动滑块303带动第三连接块304向上运动,第三连接块304带动第二连接板305向上运动,第二连接板305带动其上的零件向上运动,使第二长管3010向上运动脱离生物质燃料块,通过圆杆3011将生物质燃料块长圆孔的孔径扩大,避免成型后的生物
质燃料块粘紧在第二长管3010表面,从而避免了第二长管3010难以远离生物质燃料块的问题;成型过程中,部分杂通过第一长管308和第二长管3010上的小孔流动至第一长管308内部,长此以往会将第一长管308下部堵塞,从而使将热气的循环路径堵塞,严重影响烘干工序,当第一长管308向上远离生物质燃料块后,两个第二伸缩气缸402带动两个第四联动块403相向运动,第四联动块403带动其上的零件运动,使位于前方的两个第二限位块405相接触并位于第三联动块3014上方,然后第一电动滑块303继续向上运动,使第三联动块3014向上运动接触位于前方的两个第二限位块405,位于前方的两个第二限位块405同时对第三联动块3014阻挡限位,使隔板309继续向上运动时,第三联动块3014保持进行,从而使隔板309对第三弹力伸缩杆3012进行拉伸,遮挡块3013远离第一长管308和第二长管3010,从而使得遮挡块3013上的杂质向下流出,然后两个第二伸缩气缸402带动两个第四联动块403运动回原位,使第二限位块405运动回原位,然后第三弹力伸缩杆3012回弹带动遮挡块3013运动回原位;制得生物质燃料块后,两个第一伸缩气缸205带动两个半圆筒206进行相离运动,生物质燃料块下落至收纳筒505中,然后第二电动滑块503在第二电动滑轨502上向下滑动,第二电动滑块503带动第五联动块504向下运动,第五联动块504带动收纳筒505向下运动,收纳筒505带动生物质燃料块向下运动,然后机械臂3带动电动夹具4向生物质燃料块运动,电动夹具4将生物质燃料块夹紧,然后机械臂3带动电动夹具4向右运动,使得电动夹具4带动生物质燃料块向右运动至外置收纳框中进行收集。
55.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
