技术特征:
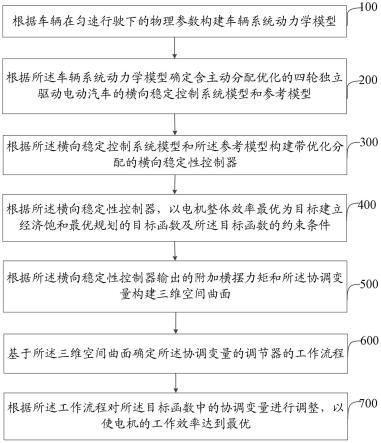
1.一种面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,包括:根据车辆在匀速行驶下的物理参数构建车辆系统动力学模型;根据所述车辆系统动力学模型确定含主动分配优化的四轮独立驱动电动汽车的横向稳定控制系统模型和参考模型;所述横向稳定控制系统模型包括协调变量;根据所述横向稳定控制系统模型和所述参考模型构建带优化分配的横向稳定性控制器;根据所述横向稳定性控制器,以电机整体效率最优为目标建立经济饱和最优规划的目标函数及所述目标函数的约束条件;根据所述横向稳定性控制器输出的附加横摆力矩和所述协调变量构建三维空间曲面;基于所述三维空间曲面确定所述协调变量的调节器的工作流程;根据所述工作流程对所述目标函数中的协调变量进行调整,以使电机的工作效率达到最优。2.根据权利要求1所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述车辆系统动力学模型为:其中,状态向量控制向量系统矩阵控制矩阵常数矩阵常数矩阵为状态向量x的一阶微分,m为整车质量,v
y
为侧向速度,v
x
为纵向速度,r为横摆角速度,δm为附加横摆力矩,i
z
为车辆质心处绕z轴的转动惯量,l
f
、l
r
分别为质心到前、后轮中心的距离,c
f
、c
r
分别为前、后轮的侧偏刚度,δ
f
为驾驶员输入的前轮转向角,δδ
f
为主动前轮转向角,β为车辆的质心侧偏角。3.根据权利要求2所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述横向稳定控制系统模型为:其中,系统状态量与参考模型的偏差其中,系统状态量与参考模型的偏差为质心侧偏角偏差,为横摆角速度偏差,为的一阶微分,系数矩阵
l为所述协调变量,系数矩阵4.根据权利要求2所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述参考模型为:特征在于,所述参考模型为:其中,δ为前轮转向角,β
ref
和r
ref
分别为期望的质心侧偏角及横摆角速度。5.根据权利要求2所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述横向稳定性控制器为:特征在于,所述横向稳定性控制器为:特征在于,所述横向稳定性控制器为:特征在于,所述横向稳定性控制器为:特征在于,所述横向稳定性控制器为:其中,j为横向稳定性控制系统的代价函数,矩阵q、r均为常值正定矩阵,ρ为权重系数,t为单位步长时间间隔,n
p
为预测步长,x
ref
(t)、分别为t时刻的参考值和第k个预测步长的状态量,i为单位矩阵,δu为控制量的变化值,δu分别为δu的上下限,为松弛变量,σ
δ
、σ
u
均为松弛系数。6.根据权利要求2所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述目标函数为:
其中,j
e
为轮毂电机扭矩分配的代价函数,系数矩阵λ=[1 1
ꢀ‑1ꢀ‑
1]b/(2r),r为车轮半径,b为左右车轮轮距,控制量u
t
=[t
lf t
lr t
rf t
rr
]
t
,t
i
(i=lf、lr、rr、rf)为电机扭矩,下标lf、lr、rr、rf分别代表左前轮、左后轮、右后轮、右前轮,v
ei
和p
t
均为权重系数,q
t
、r
t
均为权重矩阵,sat()为饱和函数。7.根据权利要求6所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述目标函数的约束条件为:[1 1 1 1]u
t
=t
r
;其中,δu
t
分别为增量δu
t
的最大值和最小值,t
r
为总驱动扭矩,u
tmax
为最大的控制输入,sign()为符号函数。8.根据权利要求2所述的面向电动汽车横向稳定控制的经济型优化策略构建方法,其特征在于,所述基于所述三维空间曲面确定所述协调变量的调节器的工作流程,包括:根据所述三维空间曲面确定二维平面;所述二维平面是在所述三维空间曲面的纵轴为零时的平面;所述三维空间曲面的坐标轴x
t
、坐标轴y
t
均为轮毂电机扭矩,所述三维空间曲面的坐标轴z
e
为电机效率;构建轮毂电机的扭矩约束;所述扭矩约束为:其中,轮毂电机扭矩t
lf
、t
lr
、t
rr
、t
rf
分别为x1、y1、x2、y2,t
r
/2记为z
*
,rδm/b记为δz;将所述扭矩约束的几何关系确定第一线条和第二线条;所述二维平面内第一线条和第二线条上的点在x和y坐标轴的投影分别为轮毂电机扭矩x1、y1、x2、y2;基于gauss曲面理论分析,根据所述第一线条、所述第二线条、所述三维空间曲面和所述二维平面确定所述工作流程。9.一种面向电动汽车横向稳定控制的经济型优化策略构建系统,其特征在于,包括:动力学模型构建模块,用于根据车辆在匀速行驶下的物理参数构建车辆系统动力学模型;控制系统模型构建模块,用于根据所述车辆系统动力学模型确定含主动分配优化的四轮独立驱动电动汽车的横向稳定控制系统模型和参考模型;所述横向稳定控制系统模型包括协调变量;控制器确定模块,用于根据所述横向稳定控制系统模型和所述参考模型构建带优化分配的横向稳定性控制器;约束条件确定模块,用于根据所述横向稳定性控制器,以电机整体效率最优为目标建立经济饱和最优规划的目标函数及所述目标函数的约束条件;曲面构建模块,用于根据所述横向稳定性控制器输出的附加横摆力矩和所述协调变量
构建三维空间曲面;流程确定模块,用于基于所述三维空间曲面确定所述协调变量的调节器的工作流程;调节模块,用于根据所述工作流程对所述目标函数中的协调变量进行调整,以使电机的工作效率达到最优。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1到8中任一项记载的面向电动汽车横向稳定控制的经济型优化策略构建方法中的步骤。
技术总结
本发明涉及一种面向电动汽车横向稳定控制的经济型优化策略构建方法、系统及计算机可读存储介质,首先构建含主动分配优化的横向稳定控制系统模型,借助协调变量L实现对各部分有效工作区间的协调分配。其次,基于含主动分配优化的系统模型,在模型预测控制框架下设计横向稳定性控制器。其中,所设计的目标函数J使车辆的运动状态跟踪稳态时的期望值,目标函数J
技术研发人员:陈建锋 叶贻财 汤传业 赵景波 吴强 周卫琪 姚文卿 孙文
受保护的技术使用者:江苏大学 安徽大学
技术研发日:2022.06.16
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。