1.发明属于声发射/微震传感器数据校准技术领域,具体涉及一种声发射/微震传感器校准系数量化方法。
背景技术:
2.随着我国大型土建工程规模的不断增大,如矿山工程、核电工程、隧道工程等,岩石力学理论及相应更加精细的岩体内部破裂机理的研究愈发重要。声发射是岩石材料在外载荷作用下由于自身变形断裂导致储存的应变能以应力波的形式快速释放的一种现象,声发射现象反映了岩石微裂纹萌生扩展及贯通破坏过程,是探究岩石破裂机理的一种重要监测手段,利用声发射波形信息对深入研究和理解岩石的破坏特征、损伤演化等具有重要意义。
3.随着岩石力学的不断发展,对岩石内部破裂机制的研究逐渐深入,近年来越来越多的学者将矩张量理论引入到岩石内部破裂的震源机制研究中,以期得到岩石裂纹萌生、扩展、贯通及相互作用的内部损伤演化过程和规律及其与应力之间的对应关系,从而应用于工程中指导生产。而波形信息采集的准确性是矩张量反演方法的合理性的必要条件,初动振幅幅值作为矩张量反演的初始参数其准确性直接影响反演结果。
4.然而,实验采集声发射应力波初动振幅时,由于传感器与岩壁耦合效果差等因素,导致传感器接收到的应力波初动振幅与真实应力波初动振幅大小存在差异,因此,亟需一种传感器校准系数量化方法,提高初动振幅提取精度,为真实解算岩石内部裂纹大小与演化规律奠定基础。
技术实现要素:
5.为了解决上述问题,本发明提供一种声发射/微震传感器校准系数量化方法。
6.本发明提供一种声发射/微震传感器校准系数量化方法,包括如下步骤:
7.步骤1、落球实验及其三维数值模型的建立:利用声发射/微震传感器采集实验中落球在岩石中激发的应力波,建立落球实验对应的三维实体模型,划分网格并对落球及岩石的网格单元进行物理力学参数的赋值,建成三维数值模型;
8.步骤2、落球激发应力波传播过程的数值模拟:对三维数值模型施加边界条件,并模拟球体下落、撞击岩石并在岩石中激发应力波的传播过程;
9.步骤3、比较落球实验及数值模拟结果,确定各声发射/微震传感器的校准系数。
10.在本发明的声发射/微震传感器校准系数量化方法中,所述步骤1 具体为:
11.步骤1.1、落球实验:在制作好的直径为5cm、高为10cm的圆柱体的标准岩样的表面标记点处涂抹凡士林并贴置声发射/微震传感器;将直径为0.8cm的钢球置于岩样上表面中心点正上方10cm处;准备就绪后,让钢球做自由落体撞击岩样上表面中心点并实时采集落球激发的应力波波形信息,重复3次上述实验以减小实验误差;
12.步骤1.2、三维实体建模:采用数值模拟软件建立以球体、圆柱体为基本构件,球体
位于圆柱体正上方10cm处为相对空间位置的三维实体模型,其中球体、圆柱体尺寸与声发射实验选取的钢球和标准岩样的物理模型尺寸相一致;
13.步骤1.3、网格划分:三维实体模型结构简单,尺寸较小,网格尺度选择极细化处理以保证模型计算精度;
14.步骤1.4、物理力学参数的赋值:通过数值模拟软件分别对钢球和标准岩样进行物理力学参数赋值,包括杨氏模量、泊松比、密度,由于多数数值模拟软件无法直接对波速赋值,通过赋予材料弹性模量及密度来间接赋值波速,波速与弹性模量、密度间的关系如下式表示:
[0015][0016]
式中,e为标准岩样的弹性模量,单位pa;ρ为标准岩样的密度,单位kg/m3。
[0017]
在本发明的声发射/微震传感器校准系数量化方法中,所述步骤2 中对三维数值模型施加边界条件具体为:
[0018]
首先,钢球撞击标准岩样上表面,钢球及标准岩样表面区域独立且不会发生表面穿透,因此将钢球与标准岩样上表面设置为接触对,钢球设置为源,标准岩样上表面设置为目标;
[0019]
其次,为简化模拟过程,使钢球以匀速状态撞击标准岩样上表面中心点,设置钢球初始速度为v
p
:
[0020][0021]
式中:v
p
为钢球的初始速度,单位为m/s;d为钢球下表面到标准岩样上表面的初值距离,单位为m;g为重力加速度;
[0022]
最后,需解算标准岩样表面的固体力学速度场波形数据,只对岩石的底面设置固定约束。
[0023]
在本发明的声发射/微震传感器校准系数量化方法中,所述步骤3 具体包括如下步骤:
[0024]
步骤3.1:提取落球实验中的应力波初动振幅;
[0025]
步骤3.2:提取数值模拟结果中的应力波初动振幅;
[0026]
步骤3.3:分别解算应力波在岩石中传播的衰减率和传感器、岩壁耦合界面对应力波的衰减系数,对声发射/微震传感器精确校准。
[0027]
在本发明的声发射/微震传感器校准系数量化方法中,所述步骤 3.1具体包括如下步骤:
[0028]
步骤3.1.1:对声发射/微震传感器采集的波形数据进行预处理,将电信号波形转换为速度波形(传感器电压-速度转换系数v/(m/s):501.19),去掉尾部四分之一波形数据,并截取第一个非0点至最后一个非0点之间的波形数据作为最终波形数据;
[0029]
步骤3.1.2:采用赤池信息准则aic方法依次计算初始到时:选取不同的波形节点,截取不同长度的波形数据,计算不同截取方式对应的aic值,提取aic最小值对应的波形节点作为初始到时:
[0030]
aic=k
×
lgs
12
k2×
lgs
12
[0031]
式中:k为截取的波形长度,为截取的波形数据的方差,k2为剩余波形长度,剩余波形数据的方差;
[0032]
步骤3.1.3:根据下式提取速度波形初动振幅:
[0033]
au'n=max||bon||
∞
[0034]
式中:au'n为落球实验中第n个声发射/微震传感器采集的应力波的初动振幅,bon为第n个声发射/微震传感器采集到的波形数据中从初始到时至下一个非0数据之间的波速矩阵,||bon||
∞
表示对波速矩阵bon中的元素取绝对值,max||bon||
∞
表示选取波速矩阵的元素绝对值的最大值。
[0035]
在本发明的声发射/微震传感器校准系数量化方法中,所述步骤 3.2具体包括如下步骤:
[0036]
步骤3.2.1:根据数值模拟结果,提取数值模拟中各个模拟传感器监测点处的速度分量矩阵,并依次计算出沿模拟传感器监测点方向的速度波形矩阵:
[0037]vm
=[v
xm
,v
ym
,v
zm
]
[0038]v′m=im×vm
[0039]
式中,vm为数值模拟中第m个模拟传感器监测点处的速度分量矩阵,v
xm
,v
ym
,v
zm
分别为x、y、z方向的速度分量,单位m/s,v
′m为垂直于第m个模拟传感器监测点方向的速度矩阵,im为各模拟传感器监测点的方向向量;
[0040]
步骤3.2.2:根据下式计算数值模拟中各波形数据的初动振幅:
[0041]
aum=max||bom||
∞
[0042]
式中,aum为数值模拟中第m个模拟传感器监测点采集的应力波的初动振幅;m为模拟传感器监测点的序号,bom为v
′m中截取从初始到时到下一个非0数据点之间的波速矩阵,||bom||
∞
表示对波速矩阵bom中的元素取绝对值,max||bom||
∞
表示选取波速矩阵的元素绝对值的最大值,初始到时的计算方法与步骤3.1.2相同。
[0043]
在本发明的声发射/微震传感器校准系数量化方法中,所述步骤 3.3具体为:
[0044]
步骤3.3.1:声发射/微震传感器的校准系数计算:在模拟计算中岩石材料往往设置为均值材料,而真实的岩石材料内部构造十分复杂,应力波在岩石内部传播过程中衰减更加明显,设置应力波在该岩石材料中传播单位长度的幅值衰减系数为:
[0045][0046]
式中:n表示落球实验中声发射/微震传感器的数量和数值模拟中模拟传感器监测点数量;d为应力波在岩石中传播的衰减率;li为声源到第i个声发射/微震传感器的距离,lj为声源到第j个声发射/ 微震传感器的距离;aui为数值模拟中第i个模拟传感器监测点采集的应力波的初动振幅,auj为数值模拟中第j个模拟传感器监测点采集的应力波的初动振幅;au
′i为落球实验中第i个声发射/微震传感器采集的应力波的初动振幅,au'j为落球实验中第j个声发射/微震传感器采集的应力波的初动振幅;
[0047]
步骤3.3.2:在实验中因传感器与岩壁耦合效果差原因导致提取的初动振幅降低,
其振幅的衰减系数为t,即传感器、岩壁耦合界面对应力波的衰减率,因此定义数值模拟计算应力波初动振幅au与实验提取的应力波初动振幅au'关系为:
[0048]
au'=t
×
(au-d
×
l)
[0049][0050]
式中:t为传感器、岩壁耦合界面对应力波的衰减率;ln为声源到第n个声发射/微震传感器n的距离;
[0051]
分别解算应力波在岩石中传播的衰减率和传感器、岩壁耦合界面对应力波的衰减系数,对声发射/微震传感器精确校准。
[0052]
步骤3.3.3:声发射/微震传感器的校准计算公式为:
[0053][0054]
其中,用d和t表示声发射/微震传感器的校准系数校准系数。
[0055]
本发明的一种声发射/微震传感器校准系数量化方法,具有以下有益效果:
[0056]
该方法克服了不同传感器与岩壁耦合效果存在差异,以及应力波幅值在复杂的岩石材料中的衰减导致传感器接收到的应力波初动振幅与真实应力波初动振幅大小存在差异的难点,为声发射定位以及运矩张量方法对声发射破裂类型进行解算等问题提供准确的基础参数,提高计算精度。另为基于comsol模拟软件的仿真app的开发,可针对不同岩性、不同传感器布置方式及通道数量的物理实验进行模拟计算,使该计算方式具有普遍使用性。
附图说明
[0057]
图1是本发明的一种声发射/微震传感器校准系数量化方法的流程图;
[0058]
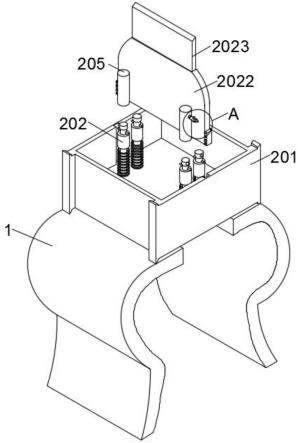
图2是实施例中声发射/微震传感器的位置;
[0059]
图3是划分网格后的三维数值模型;
[0060]
图4a是实施例中钢球撞击实验的数值模拟结果;
[0061]
图4b是实施例中钢球撞击实验的数值模拟结果俯视图;
[0062]
图5a是实施例中实测声发射波形示意图;
[0063]
图5b是实施例中模拟声发射波形示意图。
具体实施方式
[0064]
以下结合附图和具体实施例对本发明作进一步的介绍。
[0065]
如图1所示,本发明提供一种声发射/微震传感器校准系数量化方法,包括如下步骤:
[0066]
步骤1、落球实验及其三维数值模型的建立:利用声发射/微震传感器采集实验中落球在岩石中激发的应力波,建立落球实验对应的三维实体模型,划分网格并对落球及岩石的网格单元进行物理力学参数的赋值,建成三维数值模型,具体包括如下步骤:
[0067]
步骤1.1、落球实验:在制作好的直径为5cm、高为10cm的圆柱体的标准岩样的表面
标记点处涂抹凡士林并贴置声发射/微震传感器;将直径为0.8cm的钢球置于岩样上表面中心点正上方10cm处;准备就绪后,让钢球做自由落体撞击岩样上表面中心点并实时采集落球激发的应力波波形信息,重复3次上述实验以减小实验误差;
[0068]
步骤1.2、三维实体建模:采用数值模拟软件建立以球体、圆柱体为基本构件,球体位于圆柱体正上方10cm处为相对空间位置的三维实体模型,其中球体、圆柱体尺寸与声发射实验选取的钢球和标准岩样的物理模型尺寸相一致;
[0069]
步骤1.3、网格划分:三维实体模型结构简单,尺寸较小,网格尺度选择极细化处理以保证模型计算精度;
[0070]
步骤1.4、物理力学参数的赋值:通过数值模拟软件分别对钢球和标准岩样进行物理力学参数赋值,包括杨氏模量、泊松比、密度,由于多数数值模拟软件无法直接对波速赋值,通过赋予材料弹性模量及密度来间接赋值波速,波速与弹性模量、密度间的关系如下式表示:
[0071][0072]
式中,e为标准岩样的弹性模量,单位pa;ρ为标准岩样的密度,单位kg/m3。
[0073]
步骤2、落球激发应力波传播过程的数值模拟:对步骤1中建立的三维数值模型施加边界条件,并模拟球体下落、撞击岩石并在岩石中激发应力波的传播过程;
[0074]
首先,钢球撞击标准岩样上表面,钢球及标准岩样表面区域独立且不会发生表面穿透,因此将钢球与标准岩样上表面设置为接触对,钢球设置为源,标准岩样上表面设置为目标;
[0075]
其次,为简化模拟过程,使钢球以匀速状态撞击标准岩样上表面中心点,设置钢球初始速度为v
p
:
[0076][0077]
式中:v
p
为钢球的初始速度,单位为m/s;d为钢球下表面到标准岩样上表面的初值距离,单位为m;g为重力加速度;
[0078]
最后,需解算岩石表面的固体力学速度场波形数据,因此,只对岩石的底面设置固定约束。
[0079]
步骤3、比较落球实验及数值模拟结果,确定各声发射/微震传感器的校准系数,具体包括如下步骤:
[0080]
步骤3.1、提取落球实验中的应力波初动振幅,具体为:
[0081]
步骤3.1.1:对声发射/微震传感器采集的波形数据进行预处理,将电信号波形转换为速度波形(传感器电压-速度转换系数v/(m/s): 501.19),去掉尾部四分之一波形数据,并截取第一个非0点至最后一个非0点之间的波形数据作为最终波形数据;
[0082]
步骤3.1.2:采用赤池信息准则aic方法依次计算初始到时:选取不同的波形节点,截取不同长度的波形数据,计算不同截取方式对应的aic值,提取aic最小值对应的波形节点作为初始到时:
[0083]
aic=k
×
lgs
12
k2×
lgs
12
[0084]
式中:k为截取的波形长度,为截取的波形数据的方差,k2为剩余波形长度,剩
余波形数据的方差;
[0085]
步骤3.1.3:根据下式提取速度波形初动振幅:
[0086]
au'n=max||bon||
∞
[0087]
式中:au'n为落球实验中第n个声发射/微震传感器采集的应力波的初动振幅,bon为第n个声发射/微震传感器采集到的波形数据中从初始到时至下一个非0数据之间的波速矩阵,||bon||
∞
表示对波速矩阵bon中的元素取绝对值,max||bon||
∞
表示选取波速矩阵的元素绝对值的最大值。
[0088]
步骤3.2、提取数值模拟结果中的应力波初动振幅,具体为
[0089]
步骤3.2.1:根据数值模拟结果,提取数值模拟中各个模拟传感器监测点处的速度分量矩阵,并依次计算出沿模拟传感器监测点方向的速度波形矩阵:
[0090]vm
=[v
xm
,v
ym
,v
zm
]
[0091]v′m=im×vm
[0092]
式中,vm为数值模拟中第m个模拟传感器监测点处的速度分量矩阵,v
xm
,v
ym
,v
zm
分别为x、y、z方向的速度分量,单位m/s,v
′m为垂直于第m个模拟传感器监测点方向的速度矩阵,im为各模拟传感器监测点的方向向量;
[0093]
步骤3.2.2:根据下式计算数值模拟中各波形数据的初动振幅:
[0094]
aum=max||bom||
∞
[0095]
式中,aum为数值模拟中第m个模拟传感器监测点采集的应力波的初动振幅;m为模拟传感器监测点的序号,bom为v
′m中截取从初始到时到下一个非0数据点之间的波速矩阵,||bom||
∞
表示对波速矩阵bom中的元素取绝对值,max||bom||
∞
表示选取波速矩阵的元素绝对值的最大值,初始到时的计算方法与步骤3.1.2相同。
[0096]
步骤3.3、分别解算应力波在岩石中传播的衰减率和传感器、岩壁耦合界面对应力波的衰减系数,对声发射/微震传感器精确校准,具体为:
[0097]
步骤3.3.1:声发射/微震传感器的校准系数计算:在模拟计算中岩石材料往往设置为均值材料,而真实的岩石材料内部构造十分复杂,应力波在岩石内部传播过程中衰减更加明显,设置应力波在该岩石材料中传播单位长度的幅值衰减系数为:
[0098][0099]
式中:n表示落球实验中声发射/微震传感器的数量和数值模拟中模拟传感器监测点数量;d为应力波在岩石中传播的衰减率;li为声源到第i个声发射/微震传感器的距离,lj为声源到第j个声发射/ 微震传感器的距离;aui为数值模拟中第i个模拟传感器监测点采集的应力波的初动振幅,auj为数值模拟中第j个模拟传感器监测点采集的应力波的初动振幅;au
′i为落球实验中第i个声发射/微震传感器采集的应力波的初动振幅,au'j为落球实验中第j个声发射/微震传感器采集的应力波的初动振幅;
[0100]
步骤3.3.2:在实验中因传感器与岩壁耦合效果差原因导致提取的初动振幅降低,其振幅的衰减系数为t,即传感器、岩壁耦合界面对应力波的衰减率,因此定义数值模拟计算应力波初动振幅au与实验提取的应力波初动振幅au'关系为:
[0101]
au'=t
×
(au-d
×
l)
[0102][0103]
式中:t为传感器、岩壁耦合界面对应力波的衰减率;ln为声源到第n个声发射/微震传感器n的距离;
[0104]
分别解算应力波在岩石中传播的衰减率和传感器、岩壁耦合界面对应力波的衰减系数,对声发射/微震传感器精确校准。
[0105]
步骤3.3.3:声发射/微震传感器的校准计算公式为:
[0106][0107]
其中,用d和t表示声发射/微震传感器的校准系数校准系数。
[0108]
具体实施时,为适应不同的岩石材料、试件尺寸以及不同传感器布置等环境进行模拟计算,基于comsol模拟软件开发仿真app,界面参数设置包括,岩石/钢球的杨氏模量、密度、泊松比以及监测点位置信息、模型尺寸、网格监测等。
[0109]
实施例:
[0110]
1、根据实验设计建立三维实体模型,如图2所示,假定有9个声发射/微震传感器s1-s9,声发射/微震传感器位置坐标如表1所示。
[0111]
表1:声发射/微震传感器位置
[0112][0113]
2、对图2的三维实体地质模型进行网格划分,如图3所示。
[0114]
3、对网格单元赋物理力学参数值,简起见,本实施例中采用统一岩性的均匀介质。
[0115]
4、设置边界条件,以材料弹性模量及密度来间接赋以波速值。
[0116]
5、模拟钢球撞击岩样激发应力波过程,图4a是实施例中钢球撞击实验的数值模拟结果;图4b是实施例中钢球撞击实验的数值模拟结果俯视图;图5b是本实施例中模拟声发射波形示意图。设置9个模拟传感器监测点z1-z9,根据模拟结果提取九个监测点处速度波形初动振幅,如表2。
[0117]
表2:各模拟传感器监测点采集应力波的初动振幅
[0118]
模拟传感器监测点初动振幅(au)z19.02e-05z28.99e-05z39.04e-05z48.82e-05z58.79e-05z60.000088z70.000235z80.000235z90.000235
[0119]
6、图5a是本实施例中实测声发射波形示意图,采集钢球撞击实验中九个传感器的声发射数据,提取应力波初动振幅。如表3。
[0120]
表3各传感器采集应力波的初动振幅
[0121]
声发射/微震传感器初动振幅(au')s16.70e-06s23.17e-05s32.56e-05s43.90e-05s58.53e-05s65.54e-05s71.35e-04s82.21e-04s92.02e-04
[0122]
7、根据两初动振幅进行解算,得到岩石材料中传播单位长度的幅值衰减率为d=0.0011,传感器与岩壁耦合界面导致的振幅衰减系数 t。如表4所示。
[0123]
表4
[0124][0125][0126]
以上所述仅为本发明的较佳实施例,并不用以限制本发明的思想,凡在本发明的
精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。