1.本发明涉及车辆工程技术领域,特别涉及一种智能无轨列车、超长货物运输车、前进及倒车控制方法。
背景技术:
2.在车辆工程领域,提升驾驶效率、降低能源消耗、提高车辆续航能力是发展的重要方向和目标;目前,大型商用车,特别是货运车辆如能成列行驶并实现电动化则可大幅提升驾驶效率,并使能耗成本大幅下降,对于碳达峰碳中和也有着重要的意义;但是由于公路列车转弯时,前后车辆的行驶轨迹并不一致,且大型商用车特别是重型货车行驶时能耗较高;基于这两种原因,一方面难以实现较长公路列车的正常行驶,另一方面,由于化学动力电池能量密度有限,大型电动车的普及仍有难度。
3.若能实现车辆的自动转向控制并使其智能成列行驶,将大幅的提升驾驶效率;同时增程器是一种可行的电动车辆补能方案,只是现有增程器较复杂,不便操作和使用;因此本发明研制了一种智能无轨列车、超长货物运输车、前进及倒车控制方法,以解决现有技术中存在的问题,经检索,未发现与本发明相同或相似的技术方案。
技术实现要素:
4.本发明目的是:提供一种智能无轨列车、超长货物运输车、前进及倒车控制方法,以解决现有技术中车辆成列行驶难度大,而使驾驶效率难以提升的问题,同时解决大型电动车的续航里程较短的问题。
5.本发明的技术方案是:一种智能无轨列车,其创新点在于,包括:
6.若干成列行驶的车辆,包括行驶于首位的牵引车,以及跟随牵引车行驶的若干挂车,若干所述挂车中,位于行驶队列尾部的为增程器挂车;
7.定位及转向控制模块,植入所有车辆内,在车辆前进及倒车时,获取沿行驶方向处于首位车辆的行驶轨迹,并控制其余各车辆跟随此行驶轨迹转向。
8.优选的,所述定位及转向控制模块包括:
9.定位模块,分别植入各车辆内,获取各挂车车轴中心点相对于牵引车的实时位置信息;
10.惯性导航模块,植入牵引车内,用于解算沿行驶方向处于首位车辆的行驶轨迹;
11.转向控制器,以及电动转向机构,分别植入各车辆内,可以控制各挂车的转向。
12.优选的,所述挂车还包括用于提供动力的电动驱动机构,用于实现前后方车辆铰连的铰连机构;所述定位模块包括角度测量装置,所述角度测量装置安装于铰连机构上;
13.所述铰连机构包括与前方车辆尾部固定的前车铰连件,以及与后方车辆前部固定的后车铰连件,所述前车铰连件具有一铰接主销,所述后车铰连件具有一与铰接主销配合实现铰接的铰连环;
14.所述角度测量装置包括传感器基座、顶丝、角度传感器、支架、万向传动轴、花键槽
和花键;所述传感器基座固定于前车铰连件上,并与铰接主销同轴;所述角度传感器固定于传感器基座内,具有定子和转子;所述支架固定于后车铰连件上,所述花键设置于其上部,并与铰连环同轴;所述万向传动轴两端分别具有万向节,一端万向节与角度传感器的转子固定连接,另一端万向节与花键固定连接,所述花键插接配合于花键槽内。
15.优选的,所述增程器挂车还包括电源及整流罩,所述电源可采用化学电池、燃料电池、发电机中的一种或多种的组合,所述整流罩外形与前方车辆外形相配合,使列车整体呈流线型。
16.基于一种智能无轨列车,本发明还研制了一种超长货物运输车,包括上述所述的牵引车及一辆挂车,植入牵引车及挂车内的定位及转向控制模块,还包括安置于牵引车的销轴、插入销轴的转向拖盘,所述转向拖盘可绕销轴旋转;
17.超长货物一端固定于转向拖盘,另一端固定于挂车上,所述挂车在定位及转向控制模块的作用下跟随牵引车的行驶轨迹行驶并转向。
18.基于一种智能无轨列车,本发明还研制了一种车辆前进控制方法,所述前进控制方法具体如下:
19.(1)定义坐标系和时间序列,以牵引车前轴中心点f1为坐标原点,其中沿车身方向且朝向车头的一侧为y轴正方向,垂直于车身方向且朝向车身右侧为x轴正方向,定义坐标系z;
20.定义时间序列k,任一时刻为k时刻;
21.(2)初始化,k=0;
22.(3)经过时间δt后,时间序列k增加1,即k=k 1;
23.(4)定位模块解算出各挂车在牵引车坐标系下的位置坐标;
24.(5)惯性导航模块基于牵引车坐标系解算出牵引车行驶轨迹;
25.(6)转向控制器基于各挂车车轴中心点在坐标系下的坐标值及牵引车的行驶轨迹,控制各挂车对应的电动转向机构实现转向;
26.(7)若车辆退出行驶状态,步骤结束;若车辆继续行驶,回到步骤(3)。
27.优选的,所述步骤(4)中,采用车辆间的角度测量装置确定各挂车在牵引车坐标系下的位置坐标,具体方法为:
28.在前后车辆发生相对转角时,固定安装于后车铰连件上的花键槽带动花键转动,并通过万向传动轴带动角度传感器的转子转动,从而测量出前后车辆间的相对转角,进一步结合车辆尺寸链推算出各挂车间的相对位置关系及在牵引车坐标系下的坐标。
29.优选的,所述步骤(5)中,基于自身坐标系解算出牵引车行驶轨迹的方法为:
30.(1)给定k时刻牵引车前轴中心点坐标,在k时刻牵引车前轴中心点f1是坐标原点,其坐标为f
1k
(x
1k
=0,y
1k
=0);
31.(2)推算从k-1时刻到k时刻坐标系z的变化参数,其中,解算从k-1时刻到k时刻牵引车的转角θk,θk=ωk*δt,ωk为k时刻牵引车的旋转角速度,可由惯性导航模块的陀螺仪测量;安装于牵引车的车速传感器监测到其前轴中心点f1在k时刻的速度为vk,解算出:
32.x轴变化量a=-δt*vk*sinθk,
33.y轴变化量b=δt*vk*cosθk;
34.(3)坐标变换,将k-1时刻前,且包含k-1时刻,f1(f
1k-1
,f
1k-2
,
…
,f
1k-n
)的坐标值变
换成当前k时刻坐标系的坐标值,其中,坐标原点由f
1k-1
变换到f
1k
,坐标系的转角θk,经变换的x轴和y轴坐标值分别为:
35.x
1m’=(x
1m-a)*cosθk (y
1m-b)*sinθk,
36.y
1m’=(y
1m-b)*cosθ
k-(x
1m-a)*sinθk;
37.其中,m取值依次为k-1,k-2,
……
,k-n;定义尾部挂车的车轴中心点为fr,在k时刻尾部挂车车轴中心点fr在牵引车坐标系下的y轴坐标值为y
rk
,该值可由定位模块解算;需保证y
1m’>y
rk
,以确定n的取值,当y
1m’<y
rk
时,此时该点已经在尾部挂车车轴的后方;
38.(4)根据在当前时刻(k时刻)坐标系下,牵引车行驶过程中前轴中心点f1在不同时刻的坐标位置f
1k
,f
1k-1
,f
1k-2
,
…
,f
1k-n
可拟合出其行驶轨迹。
39.基于一种智能无轨列车,本发明还研制了一种车辆倒车控制方法,所述倒车控制方法具体如下:
40.倒车时,通过牵引车内的方向盘控制行车队列尾部挂车的电动转向机构,直接控制行车队列尾部的挂车转向;其余车辆的转向由定位及转向控制模块控制,通过获取尾部挂车车轴中心点的行驶轨迹,控制各车辆跟随尾部挂车轨迹自动转向;
41.具体步骤为:
42.(1)定义坐标系和时间序列;以牵引车前轴中心点f1为坐标原点,沿车身方向且朝向车头的一侧为y轴正方向,垂直于车身方向且朝向车身右侧为x轴正方向,定义坐标系z;
43.定义时间序列k,任一时刻为k时刻;
44.(2)初始化,k=0;
45.(3)经过时间δt后,时间序列k增加1,即k=k 1;
46.(4)定位模块解算出各车辆车轴中心点在牵引车坐标系下的位置坐标;
47.(5)惯性导航模块基于牵引车坐标系解算尾部挂车的行驶轨迹;
48.(6)除尾部挂车外,各车辆包括牵引车和其余挂车的转向控制器基于各车辆在所述坐标系下的坐标值及尾部挂车行驶轨迹控制各车辆电动转向机构,使各车辆沿尾部挂车轨迹倒车;
49.(7)若车辆退出行驶状态,步骤结束;若车辆继续行驶,回到步骤(3)。优选的,所述步骤(5)中尾部挂车的行驶轨迹解算方法具体为:
50.(1)定位模块解算当前时刻在坐标系z下,尾部挂车车轴中心点fr的坐标值f
rk
(x
rk
,y
rk
);
51.(2)推算从k-1时刻到k时刻坐标系z的变化参数,其中,解算从k-1时刻到k时刻牵引车的转角θk,θk=ωk*δt,ωk为k时刻牵引车的旋转角速度,可由惯性导航模块的陀螺仪测量;安装于牵引车的车速传感器监测到其前轴中心点f1在k时刻的速度为vk,解算出:
52.x轴变化量a=-δt*vk*sinθk,
53.y轴变化量b=δt*vk*cosθk;
54.(3)坐标变换,将k-1时刻前,且包含k-1时刻,fr(f
rk-1
,f
rk-2
,
…
,f
rk-n
)的坐标值变换成当前k时刻坐标系的坐标值,其中,坐标原点由f
1k-1
变换到f
1k
,坐标系的转角θk,经变换的x轴和y轴坐标值分别为:
55.x
rm’=(x
rm-a)*cosθk (y
rm-b)*sinθk,
56.y
rm’=(y
rm-b)*cosθ
k-(x
rm-a)*sinθk;
57.其中,m取值依次为k-1,k-2,
……
,k-n,且保证y
rm’《0,以确定n的取值,倒车时,行驶方向为前方,当y
rm’》0时,此时该点已经在牵引车前轴行驶方向的后方;
58.(4)根据在当前k时刻坐标系下,尾部挂车行驶过程中车轴中心点fr在不同时刻的位置f
rk
,f
rk-1
,f
rk-2
,
…
,f
rk-n
可拟合出其行驶轨迹。
59.与现有技术相比,本发明的优点是:
60.(1)本发明将牵引车与挂车组合,并基于前进与倒车控制方法,实现车辆的成列行驶,可大幅提升驾驶效率;同时位于行驶队列尾部的为增程器挂车,换电储电方便,能够有效增加车辆的行驶里程,续航能力强。
61.(2)该增程器挂车的功能是提供电能,有多种形式,包括化学电池、燃料电池、发电机中的一种或多种的组合;采用独立运输载具,只需停车位和充电桩,几乎可无人值守;整体结构设置灵活,保证大型电动车辆跨气候长距离行驶,同时也可作为乘用车的移动充电电源使用;外部罩设有整流罩,降低车辆的空气阻力。
附图说明
62.下面结合附图及实施例对本发明作进一步描述:
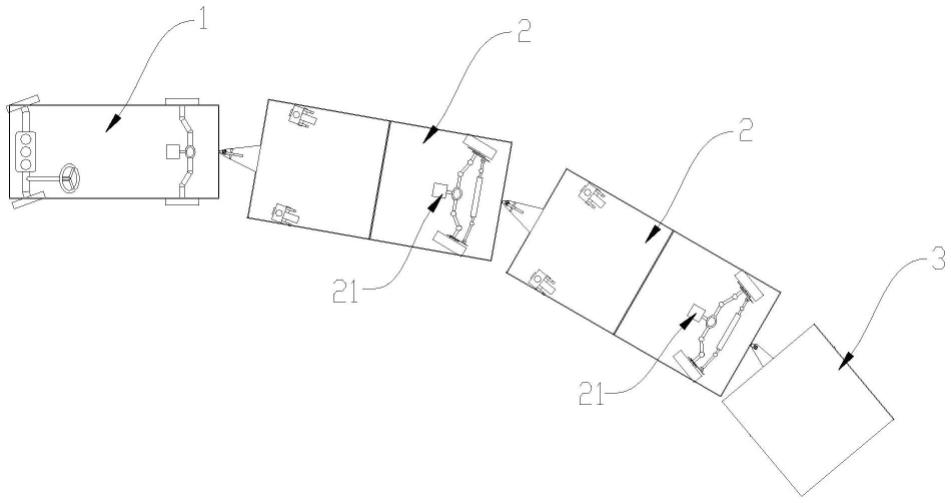
63.图1为本发明所述的一种智能无轨列车的俯视图;
64.图2为本发明所述铰连机构及角度传感器的结构放大图;
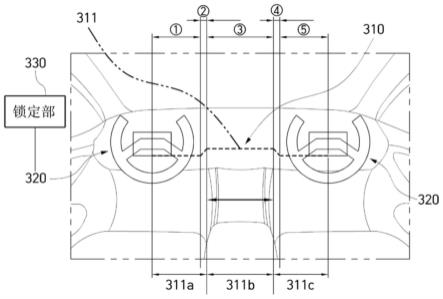
65.图3为本发明所述增程器挂车的设置结构放大图;
66.图4为本发明所述的一种超长货物运输车的结构示意图;
67.图5为本发明所述的一种车辆前进控制方法的流程图;
68.图6为本发明所述的一种车辆倒车控制方法的流程图。
69.其中:1、牵引车;
70.2、挂车,21、电动驱动机构;
71.3、增程器挂车,31、整流罩;
72.4、铰连机构,41、前车铰连件,42、后车铰连件,43、主销,44、铰连环;
73.5、角度测量装置,51、传感器基座,52、角度传感器,53、支架,54、万向传动轴,55、花键槽,56、花键;
74.6、转向拖盘,61、销轴。
具体实施方式
75.下面结合具体实施例,对本发明的内容做进一步的详细说明:
76.一种智能无轨列车,包括若干成列行驶的车辆、定位及转向控制模块。
77.如图1所示,关于若干成列行驶的车辆,包括行驶于首位的牵引车1,以及跟随牵引车1行驶的若干挂车2,若干挂车2中,位于行驶队列尾部的为增程器挂车3;挂车2还包括用于提供动力的电动驱动机构21,用于实现前后方车辆铰连的铰连机构4,以及安装于铰连机构4上的角度测量装置5。
78.电动驱动机构21用于为挂车2提供动力,增加车辆的动力性能,爬坡加速更灵活,同样的动力要求下,也可减轻牵引车1的功率。
79.如图2所示,铰连机构4包括与前方车辆尾部固定的前车铰连件41,以及与后方车
辆前部固定的后车铰连件42,前车铰连件41具有一铰接主销43,后车铰连件42具有一与铰接主销43配合实现铰接的铰连环44。
80.如图2所示,角度测量装置5包括传感器基座51、顶丝、角度传感器52、支架53、万向传动轴54、花键槽55和花键56;传感器基座51固定于前车铰连件41上,并与铰接主销43同轴;角度传感器52固定于传感器基座51内,具有定子和转子;支架53固定于后车铰连件42上,花键56设置于其上部,并与铰连环44同轴;万向传动轴54两端分别具有万向节,一端万向节与角度传感器52的转子固定连接,另一端万向节与花键56固定连接,花键56插接配合于花键槽55内。
81.增程器挂车3还包括电源及整流罩31,电源可采用化学电池、燃料电池、发电机中的一种或多种的组合,一般情况下是化学电池,主要是因为燃料电池目前价格还很高,功率尚比较小;特殊情况下,化学电池或燃料电池不便使用时,可以使用燃油发电机替代;如用在高寒高温等特殊气侯条件下,或是山区行驶时,化学电池无法满足要求的条件下使用;如图3所示,整流罩31呈流线型,用于降低车辆的空气阻力;车辆在高速行驶时,能耗相当大程度上消耗于空气阻力;而车辆的空气阻力不仅因为前方气流压力的增大,而是在相当大程度上源于后方气流压力的减小;整流罩31外形与前方车辆外形相配合,使列车整体呈流线型,在不改变列车头部外形的情况下,可有效的改善车辆尾流流场形态,相对增加尾部气流的整体压强,从而大幅降低空气阻力。
82.关于增程器挂车3的使用,将其铰接于车辆尾部,当电量用完时,可以在换电站更换,只需将铰连机构4解锁脱钩,并更换新的增程器挂车3即可;如果换下的增程器是化学电池增程器,则充电即可;如果是燃料电池,则加注氢气即可;如果是燃油发电机增程器,重新加注燃油或其它燃料即可。
83.关于定位及转向控制模块,植入所有车辆内,在车辆前进及倒车时,获取沿行驶方向处于首位车辆的行驶轨迹,并控制其余各车辆跟随此行驶轨迹转向;主要包括定位模块、惯性导航模块、转向控制器及电动转向机构;定位模块分别植入各车辆内,获取各挂车2车轴中心点相对于牵引车1的实时位置信息,安装于铰连机构4上的角度测量装置5即属于定位模块的组成部分,该角度测量装置5的功能在于:由于前后车辆间的相对运动复杂,即包括沿x轴、y轴、z轴的相对运动,也包括沿x轴、y轴、z轴的相对转动;本实施例中的角度测量装置5可以在前后车辆相对复杂运动的情况下,精度较高的测量出前后车辆的相对水平转角;惯性导航模块一般包括陀螺仪、车速传感器,植入牵引车1内,用于解算沿行驶方向处于首位车辆的行驶轨迹;转向控制器,以及电动转向机构,分别植入各车辆内,可以控制各挂车2的转向。
84.如图4所示,基于一种智能无轨列车,本发明还研制了一种超长货物运输车,包括上述的牵引车1及一辆挂车2,植入牵引车1及挂车2内的定位及转向控制模块,还包括安置于牵引车1的销轴61、插入销轴61的转向拖盘6,转向拖盘6可绕销轴61旋转;超长货物一端固定于转向拖盘6,另一端固定于挂车2上,挂车2在定位及转向控制模块的作用下跟随牵引车1的行驶轨迹行驶并转向。
85.本实施例中,牵引车1与挂车2之间无需设置铰连机构4,超长货物本身充当了连接牵引车1与挂车2之间的连接件;同时,挂车2后方也可设置增程器挂车3。
86.基于一种智能无轨列车,本发明还研制了一种车辆前进控制方法,如图5所示,前
进控制方法具体如下:
87.a、定义坐标系和时间序列,以牵引车前轴中心点f1为坐标原点,其中沿车身方向且朝向车头的一侧为y轴正方向,垂直于车身方向且朝向车身右侧为x轴正方向,定义坐标系z;
88.定义时间序列k,任一时刻为k时刻;
89.b、初始化,k=0;
90.c、经过时间δt后,时间序列k增加1,即k=k 1;
91.d、定位模块采用车辆间的角度测量装置确定各挂车在牵引车坐标系下的位置坐标,在前后车辆发生相对转角时,固定安装于后车铰连件上的花键槽带动花键转动,并通过万向传动轴带动角度传感器的转子转动,从而测量出前后车辆间的相对转角,进一步结合车辆尺寸链推算出各挂车间的相对位置关系及在牵引车坐标系下的坐标;
92.e、惯性导航模块基于牵引车坐标系解算出牵引车行驶轨迹,具体如下:
93.(1)给定k时刻牵引车前轴中心点坐标,在k时刻牵引车前轴中心点f1是坐标原点,其坐标为f
1k
(x
1k
=0,y
1k
=0);
94.(2)推算从k-1时刻到k时刻坐标系z的变化参数,其中,解算从k-1时刻到k时刻牵引车的转角θk,θk=ωk*δt,ωk为k时刻牵引车的旋转角速度,可由惯性导航模块的陀螺仪测量;安装于牵引车的车速传感器监测到其前轴中心点f1在k时刻的速度为vk,解算出:
95.x轴变化量a=-δt*vk*sinθk,
96.y轴变化量b=δt*vk*cosθk;
97.(3)坐标变换,将k-1时刻前,且包含k-1时刻,f1(f
1k-1
,f
1k-2
,
…
,f
1k-n
)的坐标值变换成当前k时刻坐标系的坐标值,其中,坐标原点由f
1k-1
变换到f
1k
,坐标系的转角θk,经变换的x轴和y轴坐标值分别为:
98.x
1m’=(x
1m-a)*cosθk (y
1m-b)*sinθk,
99.y
1m’=(y
1m-b)*cosθ
k-(x
1m-a)*sinθk;
100.其中,m取值依次为k-1,k-2,
……
,k-n;定义尾部挂车的车轴中心点为fr,在k时刻尾部挂车车轴中心点fr在牵引车坐标系下的y轴坐标值为y
rk
,该值可由定位模块解算;需保证y
1m’>y
rk
,以确定n的取值,当y
1m’<y
rk
时,此时该点已经在尾部挂车车轴的后方;
101.(4)根据在当前时刻(k时刻)坐标系下,牵引车行驶过程中前轴中心点f1在不同时刻的坐标位置f
1k
,f
1k-1
,f
1k-2
,
…
,f
1k-n
可拟合出其行驶轨迹。
102.f、转向控制器基于各挂车车轴中心点在坐标系下的坐标值及牵引车的行驶轨迹,控制各挂车对应的电动转向机构实现转向。
103.g、若车辆退出行驶状态,步骤结束;若车辆继续行驶,回到步骤c。
104.基于一种智能无轨列车,本发明还研制了一种车辆倒车控制方法,如图6所示,倒车控制方法具体如下:
105.倒车时,通过牵引车内的方向盘控制行车队列尾部挂车的电动转向机构,直接控制行车队列尾部的挂车转向;其余车辆的转向由定位及转向控制模块控制,通过获取尾部挂车车轴中心点的行驶轨迹,控制各车辆跟随尾部挂车轨迹自动转向;
106.具体步骤为:
107.a、定义坐标系和时间序列;以牵引车前轴中心点f1为坐标原点,沿车身方向且朝
向车头的一侧为y轴正方向,垂直于车身方向且朝向车身右侧为x轴正方向,定义坐标系z;
108.定义时间序列k,任一时刻为k时刻;
109.b、初始化,k=0;
110.c、经过时间δt后,时间序列k增加1,即k=k 1;
111.d、定位模块解算出各车辆车轴中心点在牵引车坐标系下的位置坐标;
112.e、惯性导航模块基于牵引车坐标系解算出尾部挂车行驶轨迹,具体方法为:
113.(1)定位模块解算当前时刻在坐标系z下,尾部挂车车轴中心点fr的坐标值f
rk
(x
rk
,y
rk
);
114.(2)推算从k-1时刻到k时刻坐标系z的变化参数,其中,解算从k-1时刻到k时刻牵引车的转角θk,θk=ωk*δt,ωk为k时刻牵引车的旋转角速度,可由惯性导航模块的陀螺仪测量;安装于牵引车的车速传感器监测到其前轴中心点f1在k时刻的速度为vk,解算出:
115.x轴变化量a=-δt*vk*sinθk,
116.y轴变化量b=δt*vk*cosθk;
117.(3)坐标变换,将k-1时刻前,且包含k-1时刻,fr(f
rk-1
,f
rk-2
,
…
,f
rk-n
)的坐标值变换成当前k时刻坐标系的坐标值,其中,坐标原点由f
1k-1
变换到f
1k
,坐标系的转角θk,经变换的x轴和y轴坐标值分别为:
118.x
rm’=(x
rm-a)*cosθk (y
rm-b)*sinθk,
119.y
rm’=(y
rm-b)*cosθ
k-(x
rm-a)*sinθk;
120.其中,m取值依次为k-1,k-2,
……
,k-n,且保证y
rm’《0,以确定n的取值,倒车时,行驶方向为前方,当y
rm’》0时,此时该点已经在牵引车前轴行驶方向的后方;
121.(4)根据在当前k时刻坐标系下,尾部挂车行驶过程中车轴中心点fr在不同时刻的位置f
rk
,f
rk-1
,f
rk-2
,
…
,f
rk-n
可拟合出其行驶轨迹。
122.f、除尾部挂车外,各车辆包括牵引车和其余挂车的转向控制器基于各车辆在坐标系下的坐标值及尾部挂车行驶轨迹控制各车辆电动转向机构,使各车辆沿尾部挂车轨迹倒车;
123.g、若车辆退出行驶状态,步骤结束;若车辆继续行驶,回到步骤c。
124.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。