技术特征:
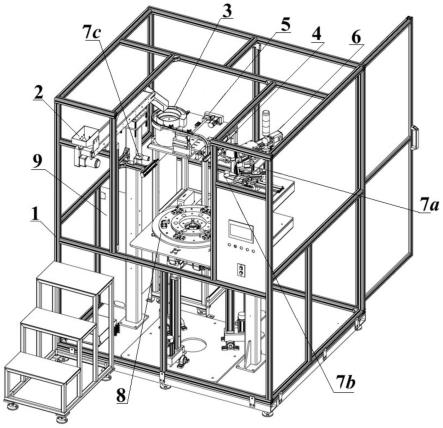
1.一种点阵式破片智能铺贴平台,其特征在于:包括所述辅助装置(1)、物料输送装置(2)、物料整理装置(3)、破片铺贴装置(4)、铺贴平台移动装置(5)、点胶装置(6)、第一检测装置(7a)、测量装置(7b)、第二检测装置(7c)、筒体姿态调整装置(8)和控制系统放置电柜(9)。所述辅助装置(1)包括平台外部防护框架(101)和若干透明挡板(102),平台外部防护框架(101)为矩形框架,若干透明挡板(102)安装在平台外部防护框架(101)上形成透明腔室s;所述透明腔室s内安装有物料输送装置机架(110)、铺贴平台移动装置机架(111)、点胶装置机架(112)、测量检测装置机架(113)和筒体姿态调整装置机架(114);所述物料输送装置(2)安装在物料输送装置机架(110)上,铺贴平台移动装置(5)固定在铺贴平台移动装置机架(111)上,物料整理装置(3)安装在铺贴平台移动装置(5)上且与物料输送装置(2)对应;所述破片铺贴装置(4)包括铺贴装置基板(401)、铺贴气缸(402)、铰接头(403)、推杆(404)、光电传感器(405)、铺贴头(406)和铺贴头盖板(407);所述铺贴装置基板(401)固定在铺贴平台移动装置(5)上,铺贴气缸(402)和铺贴头(406)均连接在铺贴装置基板(401)上;所述光电传感器(405)安装在铺贴头(406)内,铺贴头(406)上表面开设有凹槽,铺贴头盖板(407)安装在凹槽的槽口处,铺贴头盖板(407)与凹槽在铺贴头(406)上形成推动破片铺贴的通道,铺贴头盖板(407)设有供破片落入的开口;所述铺贴气缸(402)的输出端通过铰接头(403)与推杆(404)连接,推杆(404)伸入铺贴头(406)上的通道;所述点胶装置(6)包括点胶安装基板(601)、电机集成位移平台底座(602)、电机集成位移平台滑块(603)、点胶基板(604)、胶水存储器(605)、点胶姿态调整块(606)、红外传感器(607)、点胶滑动基板(608)、点胶姿态调整底座(609)、送胶管(610)、点胶针管(611)和点胶头(612);所述点胶安装基板(601)倾斜设置并固定在点胶装置机架(112) 上,电机集成位移平台底座(602)安装在点胶安装基板(601)上,点胶基板(604)通过电机集成位移平台滑块(603)与电机集成位移平台底座(602)滑动连接,滑动方向与点胶安装基板(601)的倾斜方向一致;所述点胶基板(604)在其滑动方向的低位端与点胶滑动基板(608)连接,红外传感器(607)和点胶姿态调整底座(609)均安装在点胶滑动基板(608)上,点胶姿态调整块(606)铰接在点胶滑动基板(608)上,点胶头(612)安装在点胶姿态调整块(606)上并通过送胶管(610)与胶水存储器(605)连接,点胶针管(611)安装在点胶头(612)上;所述第一检测装置(7a)和测量装置(7b)均安装在测量检测装置机架(113)上,测量装置(7b)包括测量摩擦轮(711)、编码器(712)、直线导轨(713)、测量装置基板(714)、压缩弹簧(715)和测量气缸(716);所述测量装置基板(714)安装在测量检测装置机架(113)上,直线导轨(713)和测量气缸(716)均安装在测量装置基板(714)上,测量气缸(716)的活动方向与直线导轨(713)方向一致;
若干所述压缩弹簧(715)连接在两块推板之间,两块推板均滑动连接在直线导轨(713)上,远离测量气缸(716)的一块推板上连接有测量摩擦轮(711)和编码器(712),编码器(712)位于测量摩擦轮(711)的上方,编码器(712)向下的正投影与测量摩擦轮(711)的中心重合;所述第一检测装置(7a)包括均安装在测量检测装置机架(113)上的第二补光灯源(701)、第二摄像头(702)和第三补光灯源(703),第二补光灯源(701)和第三补光灯源(703)分别位于第二摄像头(702)的下方和上方;所述筒体姿态调整装置(8)包括升降电缸(802)、连接块(803)、旋转电机(804)、减速箱(805)、气滑环(810)、转角气缸(808)、辅助旋转支撑滑轮(806)、筒体安装基板(807)和筒体固定平台(809);若干所述升降电缸(802)的下端连接在筒体姿态调整装置机架(114)上,上端通过连接块(803)与筒体安装基板(807)连接,若干连接块(803)在筒体安装基板(807)的下表面呈环形间隔布置;所述旋转电机(804)安装在筒体安装基板(807)的下表面,气滑环(810)和辅助旋转支撑滑轮(806)安装在筒体安装基板(807)的上表面,减速箱(805)与旋转电机(804)连接,减速箱(805)的输出轴穿过筒体安装基板(807)并与气滑环(810)连接,筒体固定平台(809)连接在气滑环(810)上,辅助旋转支撑滑轮(806)与筒体固定平台(809)下表面接触,若干转角气缸(808)以气滑环(810)的轴线为中心呈环形间隔布置且均固定在筒体固定平台(809)上;所述控制系统放置电柜(9)位于透明腔室s内,控制系统放置电柜(9)内放置的部件包括plc控制器、电机驱动器和电磁阀控制板;工作时,将筒体竖直放置在所述筒体固定平台(809)上并采用若干转角气缸(808)固定,若干破片通过物料输送装置(2)传入物料整理装置(3),经整理后的破片落入铺贴头(406)的通道内,若干升降电缸(802)将筒体待安装一层破片的区域调整到与铺贴头(406)以及点胶针管(611)齐平的高度;所述测量摩擦轮(711)在测量气缸(716)的推动下与筒体外壁接触,旋转电机(804)带动筒体旋转一周,测量摩擦轮(711)测量出当前铺贴层的外表面直径,结合破片尺寸得到该层需铺贴破片的数量;所述测量摩擦轮(711)回退,铺贴头(406)和点胶针管(611)移动并靠近筒体外壁,先后进行点胶和铺贴作业,每隔设定的时间转动筒体设定角度,重复点胶和铺贴,当一层的铺贴数量满足计算所得的数量时,升降电缸(802)将筒体待安装另一层破片的区域调整到与铺贴头(406)以及点胶针管(611)齐平的高度,重复铺贴,直到破片铺贴的总数量满足要求。2.根据权利要求1所述的一种点阵式破片智能铺贴平台,其特征在于:所述平台外部防护框架(101)固定在平台底座机架(104)上,平台底座机架(104)设置在地面上;所述透明腔室s为长方体腔体,透明腔室s相对的两个竖直侧壁分别记为前侧和后侧;所述透明腔室s的外侧设置有工作梯(103),工作梯(103)位于透明腔室s的前侧;所述透明腔室s的顶部安装有指示灯(108),透明腔室s的后侧开设有平台后门(109),透明腔室s前侧的外壁上设置有物料输送装置调速旋钮(105)、若干物理按键(106)和显示屏操作面板(107);工作时,使用者踏上所述工作梯(103)向物料输送装置(2)中添料,通过若干物理按键
(106)控制整个装置的启动、急停、停止和复位,通过物料输送装置调速旋钮(105)调控物料输送装置(2)的输送速度,通过显示屏操作面板(107)输入工艺参数并显示出各原动件的运动实时参数;当需要对装置进行检修时,使用者通过平台后门(109)进入透明腔室s进行检修。3.根据权利要求2所述的一种点阵式破片智能铺贴平台,其特征在于:所述物料输送装置(2)包括送料口(201)、调速电机(202)、同步带轮(203)、同步带(204)、传送带(205)、出料口(206)和安装板(207);所述安装板(207)安装在物料输送装置机架(110)上,开口朝上的矩形槽(208)固定在安装板(207)上,矩形槽(208)的两端敞口;所述传送带(205)安装在矩形槽(208)内,传送带(205)的驱动轴伸出矩形槽(208)的侧壁并通过同步带(204)与同步带轮(203)连接,同步带轮(203)安装在调速电机(202)的输出轴上,调速电机(202)固定在矩形槽(208)的下表面;所述送料口(201)和出料口(206)均固定在矩形槽(208)上且分别位于矩形槽(208)的两端,送料口(201)位于传送带(205)上方且伸出透明腔室s的前侧;工作时,使用者向所述送料口(201)添料。4.根据权利要求3所述的一种点阵式破片智能铺贴平台,其特征在于:所述铺贴平台移动装置(5)包括铺贴平台基板(501)、导轨(502)、滑块(503)、安装块(504)、铺贴平台安装板(505)、丝杠(506)、限位光电传感器(507)和移动电机(508);所述铺贴平台基板(501)固定在铺贴平台移动装置机架(111)上,相互平行的两根导轨(502)间隔布置在铺贴平台基板(501) 上,每根导轨(502)上安装有若干滑块(503),每个滑块(503)上连接有安装块(504),铺贴平台安装板(505)固定在若干安装块(504)上;所述移动电机(508)和两个限位光电传感器(507)均固定在铺贴平台基板(501)上,移动电机(508)的输出端与丝杠(506)连接,丝杠(506)位于两根导轨(502)之间且平行于导轨(502),两个限位光电传感器(507)沿丝杠(506)间隔布置;所述丝杠(506)上旋有螺母,螺母与铺贴平台安装板(505)连接;所述铺贴装置基板(401)固定在铺贴平台安装板(505)上,工作时,移动电机(508)带动铺贴平台安装板(505)沿导轨(502)滑动,带动铺贴头(406)靠近筒体外壁或回退。5.根据权利要求4所述的一种点阵式破片智能铺贴平台,其特征在于:所述物料整理装置(3)包括整理装置基板(301)、振动筛(302)、破片收集盘(303)、破片排序轨道(304)、第一光纤传感器(305)、直线轨道(306)、直线振动器(307)、直振基座(308)、第二光纤传感器(309)和曲线轨道(310);所述整理装置基板(301)固定在铺贴平台安装板(505)上,振动筛(302)和直振基座(308)固定在整理装置基板(301)上,直线振动器(307)安装在直振基座(308)上;所述破片收集盘(303)安装在振动筛(302)上且位于出料口(206)的正下方,破片收集盘(303)为平面朝下的球缺结构;所述破片收集盘(303)的边缘与轨道本体焊接,轨道本体为轴线竖直且开设有中央通孔的圆柱体,破片收集盘(303)与轨道本体的内壁焊接且靠近轨道本体的下端口;所述轨道本体上设置有破片排序轨道(304),破片排序轨道(304)包括依次连接且呈螺旋上升的第一层轨道s1、第二层轨道s2、第三层轨道s3、第四层轨道s4和第五层轨道s5;
所述轨道本体的顶部开设有螺旋状的破片回收槽,破片回收槽的最下端与破片收集盘(303)连通,第一层轨道s1、第二层轨道s2和第三层轨道s3位于轨道本体面向破片收集盘(303)的内壁上,第四层轨道s4连接在第三层轨道s3与破片回收槽之间,第五层轨道s5位于轨道本体面向破片回收槽的内壁上;待铺贴破片为长方体结构,待铺贴破片的尺寸为a
×
b
×
c,a>b>c>0,所述第一层轨道s1的下端与破片收集盘(303)连接,第一层轨道s1和第二层轨道s2的螺旋平面宽度等于a,第三层轨道s3上设置有螺旋状的内侧加装挡板,第三层轨道s3的螺旋平面宽度等于b;所述第三层轨道s3与第四层轨道s4的接壤处设置有台阶面且第四层轨道s4高于第三层轨道s3,第四层轨道s4上设置有盖板,盖板与第四层轨道s4底部的间距为b,第五层轨道s5的螺旋平面宽度等于c,第五层轨道s5的上端与螺旋状的输出轨道连接,输出轨道安装在轨道本体顶部;所述输出轨道与直线轨道(306)连接,直线轨道(306)安装在直线振动器(307)上,直线轨道(306)与曲线轨道(310)连接,曲线轨道(310)的出口与铺贴头盖板(407)的开口对应且存在间隙;所述直线轨道(306)上安装有第一光纤传感器(305)和第二光纤传感器(309),第一光纤传感器(305)靠近输出轨道,第二光纤传感器(309)靠近曲线轨道(310);工作时,若干所述待铺贴破片经出料口(206)落入破片收集盘(303),启动振动筛(302),若干待铺贴破片在破片排序轨道(304)中层层筛选,有序的若干待铺贴破片进入直线轨道(306),启动直线振动器(307),有序的若干待铺贴破片经曲线轨道(310)进入铺贴头盖板(407)的通道内,铺贴气缸(402)通过推杆(404)将待铺贴破片推出并铺贴在筒体外壁上,铺贴气缸(402)来回推动,重复铺贴;若干所述待铺贴破片经出料口(206)在破片排序轨道(304)上移动时,位于第二层轨道s2上且摆姿不符合第三层轨道s3宽度要求的待铺贴破片从第二层轨道s2和第三层轨道s3的连接处落入破片收集盘(303),位于第三层轨道s3上且摆姿高度为a的待铺贴破片在台阶面作用下翻转进入第四层轨道s4或在第四层轨道s4的盖板阻挡下落入破片收集盘(303),位于第四层轨道s4上且摆姿不符合第五层轨道s5宽度要求的待铺贴破片从第四层轨道s4和第五层轨道s5的连接处落入破片回收槽,破片回收槽中的待铺贴破片回传至破片收集盘(303)。6.根据权利要求5所述的一种点阵式破片智能铺贴平台,其特征在于:所述振动筛(302)通过其橡胶脚座的限制圈与整理装置基板(301)固定。7.根据权利要求1所述的一种点阵式破片智能铺贴平台,其特征在于:所述平台外部防护框架(101)由铝合金型材制成,透明挡板(102)由透明亚克力板制成。8.根据权利要求1所述的一种点阵式破片智能铺贴平台,其特征在于:所述第二检测装置(7c)包括均安装在平台外部防护框架(101)上的第一补光灯源和第一摄像头。9.根据权利要求1~8任意一项所述的一种点阵式破片智能铺贴平台的控制方法,其特征在于,包括以下步骤:1)将所述平台外接电源及供气装置,使用者在送料口(201)补充待铺贴破片,并在筒体固定平台(809)上安放筒体,打开电源,平台进入自检程序;2)所述物料输送装置(2)将待铺贴破片输送到物料整理装置(3)中进行整理排序,有序
的待铺贴破片输送到铺贴头(406)的通道内;3)若干所述升降电缸(802)将筒体待安装一层破片的区域调整到与铺贴头(406)以及点胶针管(611)齐平的高度;4)所述测量摩擦轮(711)在测量气缸(716)的推动下与筒体外壁接触,旋转电机(804)带动筒体旋转一周,测量摩擦轮(711)测量出当前铺贴层的外表面直径,结合破片尺寸得到该层需铺贴破片的数量;所述测量摩擦轮(711)回退,铺贴平台移动装置(5)将铺贴头(406)移动至铺贴位置,将点胶针管(611)移动至点胶位置;5)所述点胶装置(6)先进行点胶作业,每完成一次点胶作业,点胶针管(611)回退,旋转电机(804)驱动筒体固定平台(809)逆时针旋转设定角度,重复点胶作业,当第一点胶位置移动到铺贴头(406)对应位置时,铺贴气缸(402)通过推杆(404)将待铺贴破片推出并铺贴在筒体外壁上,每完成一次点胶作业,铺贴气缸(402)回退,待筒体逆时针旋转设定角度后,重复铺贴作业,直到铺贴气缸(402)的铺贴次数满足步骤4)得到的该层需铺贴破片的数量;6)所述铺贴平台移动装置(5)带动破片铺贴装置(4)和点胶装置(6)退回;7)所述升降电缸(802)将筒体待安装另一层破片的区域调整到与铺贴头(406)以及点胶针管(611)齐平的高度,并重复步骤4)~6),直到破片铺贴层数满足要求。10.根据权利要求1~8任意一项所述的一种点阵式破片智能铺贴平台的控制方法,其特征在于,包括以下步骤:1)将所述平台外接电源及供气装置,使用者在送料口(201)补充待铺贴破片,并在筒体固定平台(809)上安放筒体,打开电源,平台进入自检程序;其中,所述筒体的外壁上均匀涂抹有强力压敏胶;2)所述物料输送装置(2)将待铺贴破片输送到物料整理装置(3)中进行整理排序,有序的待铺贴破片输送到铺贴头(406)的通道内;3)若干所述升降电缸(802)将筒体待安装一层破片的区域调整到与铺贴头(406)齐平的高度;4)所述测量摩擦轮(711)在测量气缸(716)的推动下与筒体外壁接触,旋转电机(804)带动筒体旋转一周,测量摩擦轮(711)测量出当前铺贴层的外表面直径,结合破片尺寸得到该层需铺贴破片的数量;所述测量摩擦轮(711)回退,铺贴平台移动装置(5)将铺贴头(406)移动至铺贴位置;5)所述铺贴气缸(402)通过推杆(404)将待铺贴破片推出并铺贴在筒体外壁上,每完成一次铺贴作业,铺贴气缸(402)回退,待筒体逆时针旋转设定角度后,重复铺贴作业,直到铺贴气缸(402)的铺贴次数满足步骤4)得到的该层需铺贴破片的数量;6)所述铺贴平台移动装置(5)带动破片铺贴装置(4)退回;7)所述升降电缸(802)将筒体待安装另一层破片的区域调整到与铺贴头(406)齐平的高度,并重复步骤4)~6),直到破片铺贴层数满足要求。
技术总结
本发明公开了一种点阵式破片智能铺贴平台及控制方法,该平台包括辅助装置、物料输送装置、物料整理装置、破片铺贴装置、铺贴平台移动装置、点胶装置、第一检测装置a、测量装置b、第二检测装置c、筒体姿态调整装置和控制系统放置电柜。工作时,将筒体竖直固定在筒体固定平台上,破片通过物料输送装置传入物料整理装置,经整理后的破片落入铺贴头的通道内。测量摩擦轮与筒体外壁接触,筒体旋转一周,测量出当前铺贴层的外表面直径,得到该层需铺贴破片的数量。先后进行点胶和铺贴作业,每隔设定的时间转动筒体设定角度,重复点胶和铺贴,当一层的铺贴数量满足计算所得的数量时,升降电缸调整筒体的高度,重复铺贴。重复铺贴。重复铺贴。
技术研发人员:曹华军 黄潇辉 江沛 黄淇 王彦
受保护的技术使用者:重庆大学
技术研发日:2022.06.15
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。