1.本发明属于火炮领域,特别涉及一种航炮炮击试验设备。
背景技术:
2.炮击试验是考核中大型战斗部可靠性试验的重要项目,现有试验方法直接采用在航空机关炮上安装固定式试验架的方式,人工通过校靶镜将战斗部着弹点放置在炮口火线位置,人员撤离后进行击发试验。这种瞄准方式效率低,且试验过程中遇到特殊情况在远端无法操控和修正火炮指向,给人员抵近作业带来安全隐患。
技术实现要素:
3.本发明解决的技术问题是:为解决炮击试验效率低、安全性差以及试验过程无法实时方位及高低调整的问题,本发明提供一种航炮炮击试验设备,本设备能够结合航空机关炮进行远距离随动、观瞄、火控为一体进行炮击试验。
4.本发明技术方案是:一种航炮炮击试验设备,包括控制器、底板、回转支承、座圈、瞄具、托架组合、花键轴组合、摇架组合、电机组合、齿弧板组合、高低限位组合和方位限位组合;
5.所述座圈一端固连在发射平台上,另一端与回转支承内圈固连,回转支承外圈与底板固连,回转支承转动,能够带动座圈和底板旋转;托架组合与底板固连;摇架组合通过花键轴组合连接在两个托架组合之间,能够绕花键轴组合俯仰转动,待试验航炮安装在摇架组合上;齿弧板组合通过花键轴组合与托架组合侧壁连接;
6.一个电机组合与回转支撑内圈轮齿啮合,将动力传递给回转支撑,实现方位回转运动;另一个电机组合与托架组合固连,并与安装在托架组合上的齿弧板组合啮合,通过齿弧板组合将电机组合的动力传递摇架组合,实现高低俯仰运动;
7.所述瞄具连接在托架组合上,控制器用于接收、解算瞄具发送的瞄准调整信号,并向电机组合下达方位回转运动或高低俯仰运动动作指令;
8.靠近摇架组合位置处安装有高低限位组合,用于实现对待试验航炮高低俯仰运动的限位;所述座圈底部安装有方位限位组合,用于实现对待试验航炮方位回转运动的限位;
9.进一步地,所述托架组合包括左托架组合和右托架组合,左托架组合和右托架组合均包括托架底板、两个托架立板多个支角、支撑板和轴瓦;支撑板固连在两个托架立板及托架底板之间,起加强作用;花键轴组合连接于两个托架立板顶部。
10.进一步地,所诉花键轴组合包括花键轴、端盖、轴瓦和轴承;所述轴瓦为拱形结构,安装于托架组合的两个托架立板顶部弧形结构上,两个轴瓦之间形成腔体,花键轴位于腔体中,花键轴两端轴肩处分别安装轴承,端盖固连在轴瓦两端,用于限位轴承。
11.进一步地,所述摇架组合包括摇架、前导轨支撑、耳轴、后导轨支撑;摇架两侧壁上对称开设花键孔,与花键轴配合连接;摇架为框架结构,一端对称开设矩形导轨,前导轨支撑上开设矩形导槽,矩形导槽能够沿矩形导轨滑动,前导轨支撑底部开设到t型导轨,用于
连接待试验航炮;耳轴安装与摇架一端靠近矩形导轨处,耳轴与待试验航炮连接;后导轨支撑固连在摇架另一端,两侧开设矩形导槽,与待试验航炮连接。
12.进一步地,所述高低限位组合包括高低电器限位组合,所述高低电器限位组合包括高低接近传感器,和高低感应螺栓;两个高低接近传感器安装在托架组合侧壁上,通过与安装在齿弧板组合上的两个高低感应螺栓配合,实现高低电器限位。
13.进一步地,还包括高低机械限位组合;高低机械限位组合包括高低前限位组合、高低后限位组合;高低前限位组合包括高低前机械限位块、第ⅰ缓冲器;高低前机械限位块两端固连在两个托架组合上,且靠近到试验航炮炮口端,高低前机械限位块上安装有第ⅰ缓冲器;高低后限位组合固连在底板上,且靠近航炮尾端,高低后限位组合包括第ⅰ缓冲器、高低后机械限位块,高低后机械限位块上安装有第ⅰ缓冲器;
14.当航炮炮口下压时,摇架组合上且靠近航炮炮口一端下压,撞在高低前限位组合上的第ⅰ缓冲器上;当航炮炮口抬升室,摇架组合上且靠近航炮炮尾一端下压,撞在高低后限位组合的第ⅰ缓冲器上,从而实现高低机械限位作用。
15.进一步地,所述方位限位组合包括方位机械限位块、第ⅰ缓冲器和撞块;撞块固连在底板底部,两个方位机械限位块一端固连在座圈上,且位于撞块回转运动的两侧切线上,两个方位机械限位块位置夹角根据试验要求确定;第ⅰ缓冲器安装在方位机械限位块另一端;底板旋转带动撞块转动,座圈旋转带动两个方位机械限位块转动,撞块与第ⅰ缓冲器相撞,实现方位机械限位。
16.进一步地,所述方位机械限位块上还安装有方位感应螺栓,轴线与第ⅰ缓冲器轴线垂直;底板上撞块安装位置两端,分别安装有方位接近传感器;两个方位接近传感器随底板回转,能够沿回转切线方向接近方位感应螺栓,实现方位电器限位。
17.进一步地,所述齿弧板组合包括齿弧板;齿弧板为扇形结构,根部加工有花键槽,与花键轴组合配合连接;弧形端加工有轮齿,与连接在托架组合上的电机组合啮合。
18.进一步地,还包括高低安全销;齿弧板组合及托架组合侧壁上加工有销孔,不进行试验时,通过高低安全销将齿弧板组合固定在托架组合上,从而保证停止试验或运输状态下的设备和人员安全。
19.进一步地,还包括高低安全销和方位安全销;底板、齿弧板组合及托架组合侧壁上加工有销孔,不进行试验时,通过高低安全销将齿弧板组合固定在托架组合上,通过方位安全销将底板与回转支承内圈轮齿固定,齿弧板、底板与回转支承停止转动,从而保证停止试验或运输状态下的设备和人员安全
20.发明效果
21.本发明的技术效果在于:
22.1、本发明试验设备中瞄具将瞄准调整信号发送给控制器,控制器解算收到的瞄准调整信号,向两个电机组合下达动作指令:一个电机组合通过齿轮将动力传递给回转支承,回转支承带动航空机关炮1进行方位回转;另一个电机组合通过齿轮将动力传递给齿弧板,齿弧板组合通过花键轴带动摇架组合及航空机关炮做俯仰运动,实现了火炮方位旋转、高低俯仰的随动远距瞄准控制;这样人员在远端即可进行瞄准操控,提高了作业效率的同时,保证了人员始终处于安全区域操作,避免了人员抵近作业带来的人身安全问题。
23.2、本发明通过设计安装高低限位组合及方位限位组合,实现对待试验航炮高低俯
仰运动及方位回转运动的限位;
24.3、本发明通过高低安全销12将齿弧板39齿端固定在第ⅱ托架立板29上,通过方位安全销13将底板2固定在回转支承3的齿圈上,从而保证停止试验或运输状态下的设备和人员安全;工作时解脱高低安全销12和方位安全销13即可;
25.4、本发明中前导轨支撑33与后导轨支撑35,采用矩形导轨与矩形导槽配合方式与摇架连接,便于待试验航炮的拆装;
26.5、本发明中与航空机关炮连接的后导轨支撑采用一体沉入式结构,提升了射击精度。
27.6、本发明中摇架组合采用全框型结构,保证刚度的同时减轻设备重量。
附图说明
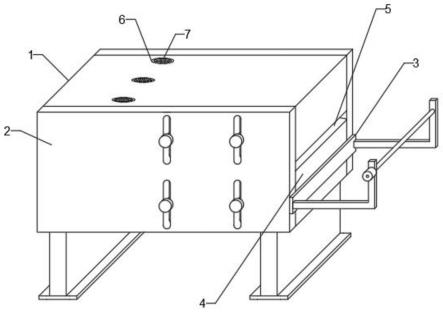
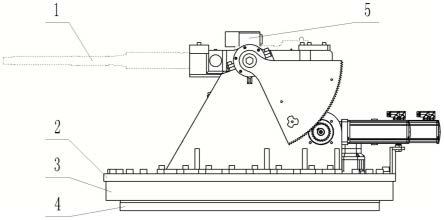
28.图1是本发明航炮炮击试验设备的主视图
29.图2是图1本发明航炮炮击试验设备的俯视图
30.图3是图1本发明航炮炮击试验设备的后视图
31.图4是本发明航炮炮击试验设备的立体结构示意图一
32.图5是本发明航炮炮击试验设备的立体结构示意图二
33.图6是底板的结构示意图
34.图7是回转支承的结构示意图
35.图8是图7回转支承的剖视图
36.图9是图8的局部放大图
37.图10是座圈的结构示意图
38.图11是瞄具的结构示意图
39.图12是右托架组合的结构示意图
40.图13是图12中花键轴组合的剖视图
41.图14是图12中第ⅰ托架立板的结构示意图
42.图15是图12中支角的结构示意图
43.图16是图12中右托架底板的结构示意图
44.图17是图12中第ⅰ托架支承板的结构示意图
45.图18是图12中第ⅱ托架支承板的结构示意图
46.图19是图13中花键轴的结构示意图
47.图20是图13中端盖的结构示意图
48.图21是图13中轴瓦的结构示意图
49.图22是左托架组合的结构示意图
50.图23是图22中第ⅱ托架立板的结构示意图
51.图24是图22中左托架底板的结构示意图
52.图25是摇架组合的结构示意图
53.图26是图25中摇架的结构示意图
54.图27是图25中前导轨支撑的结构示意图
55.图28是图25中耳轴的结构示意图
56.图29是图25中后导轨支撑的结构示意图
57.图30是图2中电机组合的结构示意图
58.图31是图3中齿弧板组合的结构示意图
59.图32是图3中高低前机械限位组合的结构示意图
60.图33是图3中电机支撑组合的结构示意图
61.图34是图4中高低后机械限位组合的结构示意图
62.图35是图5中撞块的结构示意图
63.图36是图5中方位限位组合的结构示意图
64.图37是图36中机械限位块的结构示意图
65.图中,1-航空机关炮、2-底板、3-回转支承、301-外圈、302-滚珠、303-内圈、4-座圈、5-瞄具、6-右托架组合、7-左托架组合、8-摇架组合、9-电机组合、10-齿弧板组合、11-高低前限位组合、12-高低安全销、13-方位安全销、14-电机支撑组合、15-高低后限位组合、16-撞块、17-方位接近传感器、18-方位限位组合、19-花键轴组合、20-第ⅰ托架立板、21-支角、22-右托架底板、23-第ⅰ托架支承板、24-第ⅱ托架支承板、25-花键轴、26-端盖、27-轴瓦、28-轴承、29-第ⅱ托架立板、30-左托架底板、31-高低接近传感器、32-摇架、33-前导轨支撑、34-耳轴、35-后导轨支撑、36-电机、37-减速机、38-齿轮、39-齿弧板、40-高低感应螺栓、41-高低前机械限位块、42-第ⅰ缓冲器、43-电机支撑板、44-第ⅱ缓冲器、45-高低后机械限位块、46-方位感应螺栓、47-方位机械限位块、a-矩形导轨、b-矩形导槽、c-齿轮过孔、d-撞块安装孔
具体实施方式
66.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
67.参见图1—图37,一种航炮炮击试验设备,包括控制器、底板2、回转支撑3、安装座圈4、瞄具5、右托架组合6、左托架组合7、摇架组合8、电机组合9、齿弧板组合10、高低前限位组合11、电机支撑组合14、高低后限位组合15、撞块16、方位接近传感器17、方位限位组合18;回转支承3内圈与座圈4固连,底板2与回转支承3外圈固连;右托架组合6、左托架组合7通过螺栓与底板2固连;高低前限位组合11通过螺栓将右托架组合6与左托架组合7固连;摇架组合8通过花键轴25与右托架组合6、左托架组合7连接;航空机关炮1安装在摇架组合8上;高低后限位组合15、电机支撑组合14通过螺栓与底板2固连;一个电机组合9与底板2固连并与回转支承3啮合;另一个电机组合9通过螺栓与左托架组合7固连,齿弧板组合10与左托架组合7通过花键连接,并与所述另一个电机组合9的齿轮啮合;瞄具5与右托架组合6通过花键固连;高低安全销12将齿弧板组合10定位在左托架组合7上,方位安全销13将底板2定位在回转支承3上;撞块16、两个方位接近传感器17通过螺栓与底板2固连,两个方位限位组合18通过螺栓安装在座圈4底部的安装槽中,当底板2做回转运动时,方位接近传感器17通过方位限位组合18上的感应螺栓46实现电器限位,撞块16通过与第ⅰ缓冲器42实现机械
限位。
68.工作时解脱高低安全销12和方位安全销13,一个电机组合9将动力通过齿轮传递给回转支承3,回转支承3带动整体做方位回转运动,另一个电机组合9将动力通过齿轮传递给齿弧板组合10,齿弧板组合10通过花键轴25带动摇架组合8做俯仰运动;瞄具5与航空机关炮1通过花键轴25实现同轴刚性连接,瞄具5将观测信息传递给控制器,控制器通过指令由电机组合9将航空机关炮1的炮口调整直至对准目标,完成炮击试验。
69.参照图6,底板2采用钢材制造,整体为圆盘状,主要起承载作用,底板2固连于回转支撑3外圈上,回转支撑3转动带动底板2旋转;底板2上开设有齿轮过孔c,电机组合中齿轮穿过底板2上的齿轮过孔c,与回转支承3内圈轮齿啮合;靠近齿轮过孔位置处还开设有撞块安装孔d,撞块16固连安装在撞块安装孔d处;
70.参照图7,回转支承3,采用国家标准件;包括内圈301、滚珠302和外圈303,内圈与外圈通过滚珠相互旋转,起方位回转作用,其内圈与外圈端面上均布若干螺孔,回转支承3外圈与底板2通过螺栓固连,回转支承3内圈与座圈4通过螺栓固连;回转支承3内圈设有轮齿,电机组合9上齿轮穿过底板2上过孔与回转支撑承3内圈啮合,电机组合9输出动力,回转支承内圈转动,进而带动底板2转动;
°
71.参照图10,座圈4采用钢材制造,是整个设备的安装基础,整体为圆环状,其环面上开设有两个u型槽,用于安装方位限位组合18,本实施例中u型槽位置夹角为40
°
,即方位限位角度为 20
°‑
20
°°
座圈一面与回转支承3内圈固连,另一面与发射平台固连;电机组合9输出动力,回转支承内圈转动,带动座圈4转动;
72.参照图11,瞄具5用于引导航空机关炮瞄准目标。瞄具5将瞄准调整信号发送给控制器,控制器解算收到的瞄准调整信号,向两个电机组合9下达方位回转或高低俯仰动作指令。
73.参照图12;右托架组合6包括第ⅰ托架立板20、支角21、右托架底板22、第ⅰ托架支承板23、第ⅱ托架支承板24;两个第ⅰ托架立板20焊接固连在右托架底板22上,第ⅰ托架支承板23与第ⅱ托架支承板24插在右托架底板22中部的安装槽内,且位于两个第ⅰ托架立板20之间,第ⅰ托架立板20侧壁且靠近右托架底板22位置处各安装有两个支角21,第ⅰ托架立板20顶部安装有花键轴组合19;上述零件焊接成一体;
74.参照图13;所述花键轴组合19包括花键轴25、端盖26、轴瓦27、轴承28;两个轴瓦27通过螺栓固连在两个第ⅰ托架立板20的圆弧处;两个轴承28分别安装在花键轴25两侧轴肩处,端盖26通过螺栓固连在轴瓦27两端,用于限位轴承28;花键轴25由钢材制造,其两端用于连接摇架组合8、瞄具5、齿弧板组合10;
75.参照图14;所述第ⅰ托架立板20为三角形,其顶角处开设弧状结构,所述弧状结构用于支撑花键轴组合19,所述弧形面上开设有凹槽,所述第ⅰ托架支承板23一端的轴肩凸台卡在所述凹槽中。
76.参照图16;所述右托架底板22为长方形板件,其中部开设有长方形槽,第ⅰ托架支承板23与第ⅱ托架支承板24安装在所述长方形槽中。
77.参照图21;所述轴瓦27为拱形结构,中部半圆形,两端有凸块,两个所述轴瓦27两端凸块通过螺栓固连为一体,中间形成腔体,用于安装所述花键轴组合19。
78.参照图22-图24;左托架组合7包括花键轴组合19、第ⅱ托架立板29、支角21、左托
架底板30、第ⅰ托架支承板23、第ⅱ托架支承板24;所述第ⅱ托架立板29为三角形,其顶角处开设弧状结构,所述弧状结构用于支撑花键轴组合19,所述弧形面上开设有凹槽,所述第ⅰ托架支承板23一端的轴肩凸台卡在所述凹槽中;所述第ⅱ托架立板29一端上安装有两个高低接近传感器31,通过与安装在齿弧板39上的高低感应螺栓40起高低电器限位作用;所述第ⅱ托架立板29一端上且靠近高低接近传感器31安装位置处开设通孔,一个电机组合9上的齿轮穿过所述通孔,所述电机组合与所述第ⅱ托架立板29固连;
79.左托架底板30由钢材制造,其中部开设有长方形槽,用于支撑安装第ⅱ托架立板29,第ⅰ托架支承板23、第ⅱ托架支承板24;焊接成为一体;
80.参照图25-29;摇架组合8包括摇架32、前导轨支撑33、耳轴34、后导轨支撑35;摇架组合8用于安装航空机关炮1;前导轨支撑33通过其两端的矩形导槽b安装在摇架32一端的矩形导轨a上,并通过螺栓定位、连接;后导轨支撑35安装在摇架32另一端,沉入摇架32腔体内,并通过螺栓定位、连接;两个耳轴34安装在摇架32两侧的安装孔中并用螺钉定位和连接;
81.摇架32由钢材制造,其两侧壁上对称开设花键孔,与右托架组合6、左托架组合7上的花键轴25连接,摇架32随花键轴25的转动进行高低俯仰转动;摇架32一端为u型槽状,槽壁上加工有矩形导轨,前导轨支撑33上的矩形导槽可卡在所述矩形导轨上,u型槽壁一端加工通孔,用于安装耳轴34;摇架32一端截面为矩形,后导轨支撑35固连在矩形面上;
82.前导轨支撑33为矩形,其一侧的两端加工有矩形导槽,可与摇架32一端的矩形导轨配合;其一侧中部加工有导轨,截面为t型,所述导轨与航空机关炮1连接;
83.耳轴34由钢材制造,为二阶柱状,其一端开设盲孔,与航空机关炮1连接;
84.后导轨支撑35由钢材制造,整体为u型,开口两端对称设有凸块,凸块上加工有矩形导槽;后导轨支撑35通过螺栓固连在摇架32另一端,凸块沉入摇架32腔体内,凸块侧壁与摇架内壁向贴合,具备更好地刚性支撑;后导轨支撑35通过其上矩形导槽与航空机关炮1连接;后导轨支撑35开设长条孔,后导轨支撑35与摇架32连接的四个螺栓解脱后,所述长条孔使得后导轨支撑3可以沿摇架32上端面向后部滑动,便于后导轨支撑35与航空机关炮1的安装和拆卸。
85.参照图30,电机组合9包括电机36、减速机37、齿轮38;本发明中采用两个电机组合;一个电机组合9安装在底板2上,并通过底板2上通孔与回转支承3啮合,将动力通过电机组合9的齿轮38传递给回转支撑3,实现设备的方位回转运动;另一个电机组合9安装在左托架组合7的第ⅱ托架立板29的安装孔上,并与齿弧板组合10的齿弧板39啮合,将动力通过齿轮38传递给齿弧板39,实现摇架组合8的高低俯仰运动。
86.参照图31,齿弧板组合10包括齿弧板39、高低感应螺栓40;齿弧板39将电机组合9的动力传递到摇架组合8上,高低感应螺栓40通过与安装在左托架组合7上的高低接近传感器31感应形成高低电器限位;齿弧板39为扇形结构,弧形端加工有轮齿,圆心处加工有花键槽,齿弧板39通过花键轴(25)与左托架组合7上的第ⅱ托架立板29连接;
87.参照图32,高低前限位组合11包括高低前机械限位块41、第ⅰ缓冲器42;所述限位块41为矩形块,两端设有折耳,折耳上开设螺孔,高低前机械限位块41两端通过螺栓连接在右托架组合6、左托架组合7上,且靠近摇架32上安装前导轨支撑33的一端;当航空机关炮1炮口下压,摇架32前部下压撞在第ⅰ缓冲器42上,即达到机械限位作用;第ⅰ缓冲器42为外购
件。
88.参照图33,电机支撑组合14包括电机支撑板43、第ⅱ缓冲器44;电机支撑板43为z型,一端固连在底板2上,另一端上安装有两个第ⅱ缓冲器44,分别对两个电机36起支撑作用;第ⅱ缓冲器44为外购件。
89.参照图34,高低后限位组合15固连在底板2上且靠近摇架32另一端,所述高低限位组合15包括第ⅰ缓冲器42、高低后机械限位块45,高低后机械限位块45整体为三角形支座,顶部安装第ⅰ缓冲器42;当航空机关炮1炮口抬升,摇架32后部下压撞在第ⅰ缓冲器42上,即达到机械限位作用。
90.参照图35,撞块16采用钢材制造,撞块为t型,所述撞块16固定安装在底板2底部撞块安装孔d上,且位于两个方位限位组合18之间;当航空机关炮1做方位回转时,撞块16随底板2回转,沿切线两个方向分别撞到方位限位组合18上的第ⅰ缓冲器42上,即达到方位机械限位作用。
91.参照图36-图37;方位电器限位18包括方位感应螺栓46、方位机械限位块47、第ⅰ缓冲器42,方位电器限位18在结构上集电器限位和机械限位两个作用于一身;一端为两个柱体结构焊接而成,俩柱体轴线垂直;第ⅰ缓冲器42安装在一柱体中心孔中,方位感应螺栓46安装于另一柱体中心孔中;方位机械限位块47另一端安装在座圈4的两个u形槽中,位于撞块16回转运动的两侧切线上;本实施例中方位电器限位18为两个,本实施例中两个方位电器限位18位置夹角为40
°
即方位限位角度为-20- 20
°
;也可根据试验要求调整设计;方位机械限位块47采用钢材制造,可焊接而成;
92.当航空机关炮1做方位回转时,两个方位接近传感器17随底板2回转,沿切线方向分别接近方位电器限位18上的两个方位感应螺栓46,即达到电器限位作用;当电器限位失效,固连于底板2底部的撞块16分别与方位电器限位18上的两个第ⅰ缓冲器42相撞,达到方位机械限位的作用。
93.安装时,自下而上安装:
94.1、将两个方位电器限位18分别安装在座圈4的两个u形槽中,回转支承3的齿圈通过螺栓与座圈4固连;
95.2、将底板2通过螺栓与回转支承3的外圈固连,再将撞块16用螺栓固定在底板2底部,且位于两个方位电器限位18之间;
96.3、将右托架组合6、左托架组合7通过螺栓固定在底板2顶部两侧,并将高低前限位组合11通过螺栓固连在右托架组合6、左托架组合7之间,且靠近炮口端;
97.4、将摇架组合8安装在右托架组合6、左托架组合7之间,底部通过螺栓与底板2固连;通过其侧壁上的花键槽分别与右托架组合6、左托架组合7上的两个花键轴25配合;
98.5、将高低后限位组合15通过螺栓固定在底板2上,且靠近炮尾端;
99.6、将电机支撑组合14通过螺栓固连在底板2上;
100.将一个电机组合9通过螺栓固连在底板2上,其上齿轮38穿过底板2上通孔与回转支承3内圈齿啮合;
101.7、将另一个电机组合9的齿轮38穿过右托架组合7上的第ⅱ托架立板29的通孔,并通过螺栓将电机组合9与第ⅱ托架立板29固连;
102.将齿弧板组合10与左托架组合7上的花键轴25固连,并通过螺栓和垫圈紧固、限
位,同时保证齿弧板39与齿轮38啮合;
103.8、将瞄具5与右托架组合6上的花键轴25固连,并通过螺栓和垫圈紧固、限位;
104.将两个方位接近传感器17安装在底板2上,再将两个高低接近传感器31安装在左托架组合7的第ⅱ托架立板29上;
105.不进行试验时,可通过高低安全销12将齿弧板39齿端固定在第ⅱ托架立板29上,通过方位安全销13将底板2固定在回转支承3的齿圈上,从而保证停止或运输状态下的设备和人员安全;工作时解脱高低安全销12和方位安全销13。
106.工作时,瞄具5将瞄准调整信号发送给控制器,控制器解算收到的瞄准调整信号,向两个电机组合9下达动作指令:一个电机组合9通过齿轮将动力传递给回转支承3,回转支承3带动航空机关炮1进行方位回转;另一个电机组合9通过齿轮将动力传递给齿弧板39,齿弧板组合10通过花键轴25带动摇架组合8及航空机关炮1做俯仰运动;直至航空机关炮1的炮口瞄准试验目标,即完成炮击试验。
107.试验过程中,所述第ⅱ托架立板29一端上安装有两个高低接近传感器31,通过与安装在齿弧板39上的高低感应螺栓40配合,实现高低电器限位;安装于底板2底部的两个方位接近传感器17,通过与方位电器限位18上的方位感应螺栓46配合,实现方位电器限位;高低前限位组合11和高低后限位组合15实现高低机械限位。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。