1.本技术涉及船舶管理技术领域,尤其是涉及一种船舶靠离泊调度安全评估模型。
背景技术:
2.船舶靠离泊调度计划是船舶靠离码头的计划安排,内容包含计划类型(靠泊/移泊/离泊)、计划时间、计划地点(码头/泊位/锚地/浮筒)、使用航道、船舶吃水、是否引航、拖轮数量等信息。船舶靠离泊过程中可能会出现船舶搁浅、撞船、撞码头、船舶倾覆的安全事故,事故原因一般分为:船舶调度计划安排失误、船舶驾驶失误、引航失误、拖轮协作失误几种;其中,船舶调度计划安排失误是是导致安全事故的原因中占比较大的一项。
3.为避免船舶调度计划安排失误,在规划船舶靠离泊调度计划时,一般是根据水文资料分析计划安排是否安全可行,这种分析方法纯粹依赖计划人员工作经验,人工分析缺乏效率,无法统筹分析全局风险因素,存在较高的安全风险。
4.公开号为cn112668778a的专利公开了一种智能船舶调度系统、方法及计算机存储介质,其系统包括以下模块,数据接入模块,其用于实时接入气象数据、过程时间数据、码头数据和船舶数据;排船核心模块,其用于根据实时接入的天气数据、过程时间数据、码头数据和船舶数据,采用智能泊位船舶调度方法对待排船船只进行排船,得到排船结果,并利用泊位时间轴对象对排船结果进行时间优化,且将进行时间优化后的排船结果作为最优调度方案。
5.上述技术方案,可通过计算机帮助工作人员规划船舶泊位调度计划,提高船舶靠离泊安全性,但是其存在以下缺陷:不便对已有的船舶靠离泊调度计划的做风险评估,因此本技术提出一种新的技术方案。
技术实现要素:
6.为了改善分析船舶靠离泊调度计划风险的效率,减小人工分析结果可能存在的误差,本技术提供一种船舶靠离泊调度安全评估模型。
7.本技术提供一种船舶靠离泊调度安全评估模型,采用如下的技术方案:
8.一种船舶靠离泊调度安全评估模型,包括:
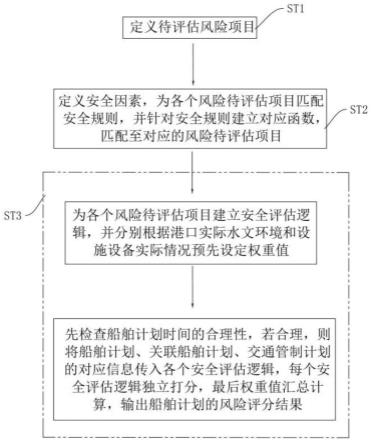
9.st1、定义待评估风险项目,其包括:对船舶是否会搁浅和船舶靠离潮汐流速是否安全定义;
10.其中,所述船舶是否会搁浅包括:航道搁浅风险和码头港池搁浅风险;所述船舶靠离潮汐流速是否安全包括:港池水流过快风险和涨退水冲突风险;
11.st2、定义安全因素,并为各个风险待评估项目匹配安全规则,其包括:
12.定义船舶计划、关联船舶计划、交通管制计划为计划因素并说明;以及,
13.定义船舶航行路径、潮汐表、航道水深规则、港池水深规则、潮汐安全规则和涨退水规则为安全规则,建立对应函数,并匹配至对应的风险待评估项目;
14.st3、为各个风险待评估项目建立安全评估逻辑,并分别根据港口实际水文环境和
设施设备实际情况预先设定权重值;且,
15.先检查船舶计划时间的合理性,若合理,则将船舶计划、关联船舶计划、交通管制计划的对应信息传入各个安全评估逻辑,每个安全评估逻辑独立打分,最后权重值汇总计算,输出船舶计划的风险评分结果。
16.可选的,所述船舶计划包括:定义英文标识shpl是本次评估的船舶计划信息,其包含计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr、靠泊计划的计划时间shpl.plti-b、离泊计划的计划时间shpl.plti-l、移泊计划的计划时间shpl.plti-m、船舶类型shpl.sht、船舶长度shpl.shl、船舶载重吨shpl.dwt、计划引航标志shpl.pim、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、拖轮总数shpl.tbn、拖轮清单shpl.tuglist[拖轮功率shpl.tugtype][拖轮功率对应数量shpl.ttnum]、计划前桩位shpl.prp、计划后桩位shpl.nep、计划前桩位的距原点米数shpl.prpd、计划后桩位的距原点米数shpl.nepd、管制船类型shpl.cst、计划指定经过的单向航道shpl.onch和船舶当前位置(含泊位锚地浮筒)shpl.cube;
[0017]
所述关联船舶计划,其包括:定义英文标识otsp是根据安全规则关联找到的一组与本次评估的船舶计划产生安全冲突的船舶计划信息,其包含船舶计划编号otsp.no、计划靠离码头otsp.dock、计划前桩位otsp.prp、计划后桩位otsp.nep、计划前桩位的距原点米数otsp.prpd、计划后桩位的距原点米数otsp.nepd、船舶长度otsp.shl、计划泊位(含锚地浮筒)otsp.ber、计划类型otsp.spt、计划时间otsp.plti、靠泊计划的计划时间otsp.plti-b、离泊计划的计划时间otsp.plti-l、移泊计划的计划时间otsp.plti-m、计划指定经过的单向航道otsp.onch和船舶当前位置(含泊位锚地浮筒)otsp.cube;
[0018]
所述交通管制计划,其包括:定义英文标识tcp是交通管理部门制定的一组管制计划信息,其包含交通管制计划编号tcp.no、交通管制船类型tcp.cst、管制船进出口标志tcp.iema、管制船抵达关键节点名称tcp.keypo、管制船抵达关键节点的计划时间tcp.keyti。
[0019]
可选的,所述检查船舶计划时间的合理性,其包括:定义英文标识为ptrc,且是根据船舶靠泊计划时间、移泊计划时间、离泊计划时间获取计划时间是否合理的一个函数;且,
[0020]
函数代表符号为:f(shpl.plti-b,shpl.plti-m,shpl.dock-l);函数内部要素包括靠泊计划时间ptrc.plti-b、移泊计划时间ptrc.plti-m、离泊计划时间ptrc.dock-l和合理标志ptrc.rama;
[0021]
所述函数集合的应用规则,其包括:
[0022]
接收参数shpl.plti-b,shpl.plti-m,shpl.dock-l,并调用内部要素;
[0023]
赋值,其包括:
[0024]
shpl.plti-b=ptrc.plti-b;
[0025]
shpl.plti-m=ptrc.plti-m;
[0026]
shpl.dock-l=ptrc.dock-l;
[0027]
判断ptrc.plti-b<ptrc.plti-m是否成立,如果成立,则执行下一判断;如果不成立,则ptrc.rama=n;
[0028]
判断shpl.plti-m=ptrc.plti-m<ptrc.dock-l是否成立,如果成立,则
ptrc.rama=y;如果不成立,则ptrc.rama=n。
[0029]
可选的,为所述航道搁浅风险建立的安全评估逻辑,其包括:
[0030]
传入计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr、当前位置shpl.cube、计划泊位shpl.ber;
[0031]
调用船舶航行路径函数,以获取船舶经过的航道序号snp.num、船舶经过的航道名称snp.chan;
[0032]
调用潮汐表函数,以获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,以公式1-1计算计划时间对应的平均潮高tid.mth;其中,公式1-1:tid.mth=(tid.prt tid.net)/2;
[0033]
根据船舶经过的航道序号snp.num循环开展每个航道的风险评估,风险权重值初始默认为0;且调用航道水深规则函数,获取航道水深chru.chd、航道水深警戒值chru.wav;
[0034]
将各数据代入公式1:chru.chd tid.mth>shpl.pdr*chru.wav,判断公式1是否成立,并记录风险评估信息,如果成立,则风险权重值不变;如果不成立风险权重值=1;
[0035]
循环处理完所有船舶经过的航道后,汇总风险评估信息、风险权重值,结束流程。
[0036]
可选的,为所述码头港池搁浅风险建立的安全评估逻辑,其包括:
[0037]
传入计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr;
[0038]
调用港池水深规则函数,获取港池使用水深haru.had、港池使用水深警戒值haru.wav;
[0039]
调用潮汐表函数,获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,并以所述公式1-1计算计划时间对应的平均潮高tid.mth;
[0040]
将各数据代入计算公式2:haru.had tid.mth>shpl.pdr haru.wav,判断公式2是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立风险权重值=1;
[0041]
汇总风险评估信息、风险权重值,结束流程。
[0042]
可选的,为所述港池水流过快风险建立的安全评估逻辑,其包括:
[0043]
传入计划时间shpl.plti、计划靠离码头shpl.dock;
[0044]
调用潮汐安全规则函数,以获取潮汐落差警戒值tsru.tiwav;
[0045]
调用潮汐表函数,以获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,以公式3-1计算计划时间对应的平均潮高tid.tidiv;其中,公式3-1:tid.tidiv=tid.net-tid.prt;
[0046]
将各数据代入计算公式3:tid.tidiv>=tsru.tiwav,判断公式3是否成立,并记录风险评估信息,如果成立,则风险权重值=1;如果不成立,则风险权重值=0;
[0047]
汇总风险评估信息、风险权重值,结束流程。
[0048]
可选的,为所述涨退水冲突风险建立的安全评估逻辑,其包括:
[0049]
传入计划靠离码头shpl.dock、靠泊计划时间shpl.plti-b、离泊计划时间shpl.plti-l;
[0050]
调用潮汐表函数,分别获取靠泊计划、离泊计划的计划时间对应的前一个整点潮汐tid.prt-b、tid.prt-l、计划时间对应的后一个整点潮汐tid.net-b、tid.net-l,计算计划时间对应的平均潮高tid.tidiv-b、tid.tidiv-l;其中,tid.tidiv-b=tid.net-b-tid.prt-b,tid.tidiv-l=tid.net-l-tid.prt-l
[0051]
调用涨退水函数,获取离泊允许的涨退水状态rfru.exall;
[0052]
将各数据代入计算公式4:tid.exrfw=rfru.exall,判断公式4是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0053]
汇总风险评估信息、风险权重值,结束流程。
[0054]
可选的,所述st1、定义待评估风险项目,其还包括:对引航拖轮安排是否合理定义;
[0055]
所述引航拖轮安排是否合理包括:引航需求风险和拖轮需求风险;
[0056]
所述st2、定义安全因素,并为各个风险待评估项目匹配安全规则,其还包括:
[0057]
定义引航需求规则和拖轮需求规则为安全规则,建立对应函数,并匹配至对应的风险待评估项目。
[0058]
可选的,为所述引航需求风险建立的安全评估逻辑,其包括:
[0059]
传入船舶类型shpl.sht、计划靠离码头shpl.dock、船舶长度shpl.shl、船舶计划吃水shpl.pdr、船舶载重吨shpl.dwt、计划引航标志shpl.pim;
[0060]
调用引航需求规则函数,获取引航需求标志piru.pim;
[0061]
将各数据代入计算公式5:shpl.pim=piru.pim,判断公式5是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0062]
汇总风险评估信息、风险权重值,结束流程。
[0063]
可选的,为所述拖轮需求风险建立的安全评估逻辑,其包括:
[0064]
传入船舶长度shpl.shl、船舶计划吃水shpl.pdr、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、船舶类型shpl.sht、拖轮总数shpl.tbn、拖轮清单shpl.tuglist[拖轮功率shpl.tugtype][拖轮功率对应数量shpl.ttnum];
[0065]
调用拖轮需求规则函数,获取拖轮需求总数最小值tbs.mintbn、拖轮需求总数最大值tbs.maxtbn、特殊功率类型tbs.sptype、特殊功率拖轮需求数最小值tbs.minsptbn、特殊功率拖轮需求数最大值tbs.maxsptbn;
[0066]
将各数据代入计算公式6-1:total(tbn)=shpl.tbn∈[tbs.mintbn,tbs.maxtbn];
[0067]
将各数据代入计算公式6-2:ttamount=(shpl.tugtype1,shpl.ttnum1) (shpl.tugtype2,shpl.ttnum2) ... (shpl.tu gtypen,shpl.ttnumn),计算拖轮功率大于需求的拖轮总数;
[0068]
将各数据代入计算公式6-3:sp(tta)=ttamount∈[tbs.minsptbn,tbs.maxsptbn],判断公式6-3是否成立,并记录风险评估信息;
[0069]
将公式6-1、公式6-3的结果代入公式6:total(tbn)∧sp(tta)=true,判断公式6是否成立,并记录风险评估信息,如果公式成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0070]
汇总风险评估信息、风险权重值,结束流程。
[0071]
综上所述,本技术包括以下至少一种有益技术效果:本技术所述的船舶靠离泊调度计划的安全性评估包含了多因素多场景多规则的评估流程;比对低效的人工分析,应用本技术的评估模型能实现业务系统自动快速评估,瞬间完成复杂的评估流程,极大提高分析效率。
附图说明
[0072]
图1是本技术的整体流程示意图。
[0073]
图2是本技术的船舶航行路径的函数集合应用流程示意图;
[0074]
图3是本技术的潮汐表的函数集合应用流程示意图;
[0075]
图4是本技术的航道水深规则的函数集合应用流程示意图;
[0076]
图5是本技术的港池水深规则的函数集合应用流程示意图;
[0077]
图6是本技术的潮汐安全规则的函数集合应用流程示意图;
[0078]
图7是本技术的涨退水规则的函数集合应用流程示意图;
[0079]
图8是本技术的船舶计划时间的合理性检测的流程示意图。
具体实施方式
[0080]
以下结合附图1对本技术作进一步详细说明。
[0081]
本技术实施例公开一种船舶靠离泊调度安全评估模型。
[0082]
实施例1:
[0083]
参照图1,船舶靠离泊调度安全评估模型包括:
[0084]
st1、定义待评估风险项目;
[0085]
st2、定义安全因素,为各个风险待评估项目匹配安全规则,并针对安全规则建立对应函数,匹配至对应的风险待评估项目;
[0086]
st3、为各个风险待评估项目建立安全评估逻辑,并分别根据港口实际水文环境和设施设备实际情况预先设定权重值;且,
[0087]
先检查船舶计划时间的合理性,若合理,则将船舶计划、关联船舶计划、交通管制计划的对应信息传入各个安全评估逻辑,每个安全评估逻辑独立打分,最后权重值汇总计算,输出船舶计划的风险评分结果。
[0088]
各个项目,以0代表无明显风险,若为1代表风险较高为例:汇总输出风险评分结果范围在0-10分之间,0代表无明显风险,10代表存在极大风险。
[0089]
本技术旨在为船舶靠离泊调度计划提供一种包含多个安全风险因素的快速评估工具,有效解决目前人工分析存在的分析缺乏效率,分析结果可能存在误差,导致不能指导实际生产的问题。
[0090]
本技术能实现自动快速评估,极大提高分析效率,下述其他实施例,多因素、多场景具体说明,因此不再赘述。
[0091]
实施例2,其与实施例1的区别在于:
[0092]
st1、其包括:对船舶是否会搁浅和船舶靠离潮汐流速是否安全定义。
[0093]
其中,所述船舶是否会搁浅,指的是船舶在靠离泊过程中是否存在航道或港池触底搁浅风险;其包括:
[0094]
1)、航道搁浅风险,指的是船舶在公共航道航行时存在触底搁浅风险。
[0095]
2)、码头港池搁浅风险,指的是船舶在码头港池靠离泊时存在触底搁浅风险。
[0096]
船舶靠离潮汐流速是否安全,指的是船舶在靠离泊过程中码头港池的潮汐流速是否会威胁到船舶安全,其包括:
[0097]
1)、港池水流过快风险,指的是码头港池的水流速度超过警戒值,影响船舶靠离泊
安全,存在碰撞码头的风险。
[0098]
2)、涨退水冲突风险,指的是船舶在靠离泊时不符合交通管制的涨退水靠离泊规则,存在安全风险。
[0099]
st2、其包括:
[0100]
定义船舶计划、关联船舶计划、交通管制计划为计划因素并说明;以及,
[0101]
定义船舶航行路径、潮汐表、航道水深规则、港池水深规则、潮汐安全规则、涨退水规则为安全规则,建立对应函数,并匹配至对应的风险待评估项目。
[0102]
可以理解的是,为保证内容连贯的同时用作区分,下述实施例中有补入(1)、(2)、(3)......;但是,请注意,诸如上述(1)、(2)、(3),其并非一定是模型的各个步骤的执行顺序,因此也存在错位,模型的执行逻辑根据文字说明连接,至少为从st1-st3。
[0103]
关于上述三个计划因素,具体地:
[0104]
(1)、船舶计划包括:定义英文标识shpl是本次评估的船舶计划信息,其包含计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr、靠泊计划的计划时间shpl.plti-b、离泊计划的计划时间shpl.plti-l、移泊计划的计划时间shpl.plti-m、船舶类型shpl.sht、船舶长度shpl.shl、船舶载重ωtshpl.dwt、计划引航标志shpl.pim、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、拖轮总数shpl.tbn、拖轮清单shpl.tuglist[拖轮功率shpl.tugtype][拖轮功率对应数量shpl.ttnum]、计划前桩位shpl.prp、计划后桩位shpl.nep、计划前桩位的距原点米数shpl.prpd、计划后桩位的距原点米数shpl.nepd、管制船类型shpl.cst、计划指定经过的单向航道shpl.onch和船舶当前位置(含泊位锚地浮筒)shpl.cube。
[0105]
(2)、关联船舶计划,其包括:定义英文标识otsp是根据安全规则关联找到的一组与本次评估的船舶计划产生安全冲突的船舶计划信息,其包含船舶计划编号otsp.no、计划靠离码头otsp.dock、计划前桩位otsp.prp、计划后桩位otsp.nep、计划前桩位的距原点米数otsp.prpd、计划后桩位的距原点米数otsp.nepd、船舶长度otsp.shl、计划泊位(含锚地浮筒)otsp.ber、计划类型otsp.spt、计划时间otsp.plti、靠泊计划的计划时间otsp.plti-b、离泊计划的计划时间otsp.plti-l、移泊计划的计划时间otsp.plti-m、计划指定经过的单向航道otsp.onch和船舶当前位置(含泊位锚地浮筒)otsp.cube。
[0106]
(3)、交通管制计划,其包括:定义英文标识tcp是交通管理部门制定的一组管制计划信息,其包含交通管制计划编号tcp.no、交通管制船类型tcp.cst、管制船进出口标志tcp.iema、管制船抵达关键节点名称tcp.keypo、管制船抵达关键节点的计划时间tcp.keyti。
[0107]
关于上述各个规则及对应建立的函数,具体地:
[0108]
(5)、船舶航行路径:英文标识为snp,是根据船舶当前位置、目的位置获取船舶航行路径的一个函数集合,代表符号为f(shpl.cube,shpl.ber),shpl.cube代表船舶当前位置,shpl.ber代表计划泊位(含锚地浮筒)。
[0109]
函数内部要素包括船舶当前位置snp.cube、计划泊位(含锚地浮筒)snp.ber、船舶经过的航道序号snp.num、船舶经过的航道名称snp.chan。
[0110]
函数集合应用包含获取船舶航行时经过的航道snp.chan=f(shpl.cube,shpl.ber),运行上述函数得到的结果是一份清单list。
[0111]
参照图2,其为本函数集合的应用流程示意图。
[0112]
(6)、潮汐表:英文标识为tid,是根据时间、地点获取潮高、流向数据的一个函数集合,代表符号为f(shpl.plti,shpl.dock),shpl.plti代表船舶计划时间,shpl.dock代表船舶计划靠离码头。
[0113]
函数内部要素包括整点时间tid.plti、地点tid.dock、整点潮汐高度tid.th(单位:厘米)。
[0114]
函数应用包含获取计划时间对应的前一个整点潮汐tid.prt=f([shpl.plti],shpl.dock),获取计划时间对应的后一个整点潮汐tid.net=f(([shpl.plti] 1),shpl.dock),获取靠泊计划对应的前一个整点潮汐tid.prt-b=f([shpl.plti-b],shpl.dock-b),获取靠泊计划对应的后一个整点潮汐tid.net-b=f(([shpl.plti-b] 1),shpl.dock-b),获取离泊计划对应的前一个整点潮汐tid.prt-l=f([shpl.plti-l],shpl.dock-l),获取离泊计划对应的后一个整点潮汐tid.net-l=f(([shpl.plti-l] 1),shpl.dock-l),获取计划时间对应的平均潮高tid.mth=(tid.prt tid.net)/2,获取计划对应的潮落差值tid.tidiv=tid.net-tid.prt、靠泊计划的潮落差值tid.tidiv-b=tid.net-b-tid.prt-b,获取离泊计划的潮落差值tid.tidiv-l=tid.net-l-tid.prt-l,获取靠泊计划的涨退水状态tid.imrfw=(tid.tidiv-b>0为涨水,tid.tidiv-b<0为退水),获取离泊计划的涨退水状态tid.exrfw=(tid.tidiv-l>0为涨水,tid.tidiv-l<0为退水)。
[0115]
参照图3,其为本函数集合的应用流程示意图。
[0116]
(7)、航道水深规则:英文标识为chru,是根据航道名称获取航道水深、航道水深警戒值数据的一个函数集合,代表符号为f(snp.chan,ele),snp.chan代表船舶航行时经过的航道,ele代表函数内部要素名称。
[0117]
函数内部要素包括航道名称chru.chan、航道水深chru.chd(单位:米)、航道水深警戒值chru.wav(单位:米)。
[0118]
函数应用包含获取航道水深chru.chd=f(snp.chan,chd),获取航道水深警戒值chru.wav=f(snp.chan,wav)。
[0119]
参照图4,其为本函数集合的应用流程示意图。
[0120]
(8)、港池水深规则:英文标识为haru,是根据码头名称获取港池使用水深、港池使用水深警戒值数据的一个函数集合,代表符号为f(shpl.dock,ele),shpl.dock代表船舶计划靠离码头,ele代表函数内部要素名称。
[0121]
函数内部要素包括码头港池名称haru.dock、港池使用水深haru.had(单位:米)、港池使用水深警戒值haru.wav(单位:米)。
[0122]
函数应用包含获取港池使用水深haru.had=f(shpl.dock,had),获取港池使用水深警戒值haru.wav=f(shpl.dock,wav)。
[0123]
参照图5,其为本函数集合的应用流程示意图。
[0124]
(9)、潮汐安全规则:英文标识为tsru,是根据计划靠离码头获取潮汐落差警戒值的一个函数集合,代表符号为f(shpl.dock),shpl.dock代表船舶计划靠离码头。
[0125]
函数内部要素包括码头tsru.dock、潮汐落差警戒值tsru.tiwav(单位:厘米)。
[0126]
函数应用是获取潮汐落差警戒值tsru.tiwav=f(shpl.dock)。
[0127]
参照图6,其为本函数集合的应用流程示意图。
[0128]
(10)、涨退水规则:英文标识为rfru,是根据计划靠离码头、船舶靠泊时的涨退水状态获取船舶离泊时允许的涨退水状态的一个函数集合,代表符号为f(shpl.dock,tid.imrfw),shpl.dock代表船舶计划靠离码头,tid.imrfw代表船舶靠泊时的涨退水状态。
[0129]
函数内部要素包括码头rfru.dock、靠泊涨退水状态rfru.imrfw、离泊允许的涨退水状态rfru.exall。
[0130]
函数应用是获取离泊允许的涨退水状态rfru.exall=f(shpl.dock,tid.imrfw)。
[0131]
参照图7,其为本函数集合的应用流程示意图。
[0132]
关于上述规则的与各个项目的匹配,参见其他实施例对st3的具体解释。
[0133]
实施例3,其与实施例2的区别在于:
[0134]
关于st3中的先检查船舶计划时间的合理性,具体地:
[0135]
(4)、检查船舶计划时间的合理性,其包括:定义英文标识为ptrc,且是根据船舶靠泊计划时间、移泊计划时间、离泊计划时间获取计划时间是否合理的一个函数;且,
[0136]
函数代表符号为:f(shpl.plti-b,shpl.plti-m,shpl.dock-l);函数内部要素包括靠泊计划时间ptrc.plti-b、移泊计划时间ptrc.plti-m、离泊计划时间ptrc.dock-l和合理标志ptrc.rama;
[0137]
参照图8,函数集合的应用规则,其包括:
[0138]
接收参数shpl.plti-b,shpl.plti-m,shpl.dock-l,并调用内部要素;
[0139]
赋值,其包括:
[0140]
shpl.plti-b=ptrc.plti-b;
[0141]
shpl.plti-m=ptrc.plti-m;
[0142]
shpl.dock-l=ptrc.dock-l;
[0143]
判断ptrc.plti-b<ptrc.plti-m是否成立,如果成立,则执行下一判断;如果不成立,则ptrc.rama=n;
[0144]
判断shpl.plti-m=ptrc.plti-m<ptrc.dock-l是否成立,如果成立,则ptrc.rama=y;如果不成立,则ptrc.rama=n。
[0145]
考虑上述实际也为具体风险评估的前置内容,因此以(4)对其标记。
[0146]
实施例4,其与实施例3的区别在于:
[0147]
将船舶计划、关联船舶计划、交通管制计划的对应信息传入各个安全评估逻辑,每个安全评估逻辑独立打分,具体地:
[0148]
为航道搁浅风险建立的安全评估逻辑,其包括:
[0149]
传入计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr、当前位置shpl.cube、计划泊位shpl.ber;
[0150]
调用船舶航行路径函数,以获取船舶经过的航道序号snp.num、船舶经过的航道名称snp.chan;
[0151]
调用潮汐表函数,以获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,以公式1-1计算计划时间对应的平均潮高tid.mth;其中,公式1-1:tid.mth=(tid.prt tid.net)/2;
[0152]
根据船舶经过的航道序号snp.num循环开展每个航道的风险评估,风险权重值初
始默认为0;且调用航道水深规则函数,获取航道水深chru.chd、航道水深警戒值chru.wav;
[0153]
将各数据代入公式1:chru.chd tid.mth>shpl.pdr*chru.wav,判断公式1是否成立,并记录风险评估信息,如果成立,则风险权重值不变;如果不成立风险权重值=1;
[0154]
循环处理完所有船舶经过的航道后,汇总风险评估信息、风险权重值,结束流程。
[0155]
为码头港池搁浅风险建立的安全评估逻辑,其包括:
[0156]
传入计划时间shpl.plti、计划靠离码头shpl.dock、船舶计划吃水shpl.pdr;
[0157]
调用港池水深规则函数,获取港池使用水深haru.had、港池使用水深警戒值haru.wav;
[0158]
调用潮汐表函数,获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,并以所述公式1-1计算计划时间对应的平均潮高tid.mth;
[0159]
将各数据代入计算公式2:haru.had tid.mth>shpl.pdr haru.wav,判断公式2是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立风险权重值=1;
[0160]
汇总风险评估信息、风险权重值,结束流程。
[0161]
为港池水流过快风险建立的安全评估逻辑,其包括:
[0162]
传入计划时间shpl.plti、计划靠离码头shpl.dock;
[0163]
调用潮汐安全规则函数,以获取潮汐落差警戒值tsru.tiwav;
[0164]
调用潮汐表函数,以获取计划时间对应的前一个整点潮汐tid.prt、计划时间对应的后一个整点潮汐tid.net,以公式3-1计算计划时间对应的平均潮高tid.tidiv;其中,公式3-1:tid.tidiv=tid.net-tid.prt;
[0165]
将各数据代入计算公式3:tid.tidiv>=tsru.tiwav,判断公式3是否成立,并记录风险评估信息,如果成立,则风险权重值=1;如果不成立,则风险权重值=0;
[0166]
汇总风险评估信息、风险权重值,结束流程。
[0167]
为涨退水冲突风险建立的安全评估逻辑,其包括:
[0168]
传入计划靠离码头shpl.dock、靠泊计划时间shpl.plti-b、离泊计划时间shpl.plti-l;
[0169]
调用潮汐表函数,分别获取靠泊计划、离泊计划的计划时间对应的前一个整点潮汐tid.prt-b、tid.prt-l、计划时间对应的后一个整点潮汐tid.net-b、tid.net-l,计算计划时间对应的平均潮高tid.tidiv-b、tid.tidiv-l;其中,tid.tidiv-b=tid.net-b-tid.prt-b,tid.tidiv-l=tid.net-l-tid.prt-l;
[0170]
调用涨退水函数,获取离泊允许的涨退水状态rfru.exall;
[0171]
将各数据代入计算公式4:tid.exrfw=rfru.exall,判断公式4是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0172]
汇总风险评估信息、风险权重值,结束流程。
[0173]
实施例5,其与实施例4的区别在于:
[0174]
st1、定义待评估风险项目,其还包括:对引航拖轮安排是否合理定义。
[0175]
引航拖轮安排是否合理,指的是船舶计划的引航安排、拖轮安排是否安全合理,其包括:
[0176]
1)、引航需求风险,指的是船舶计划的引航安排是否满足引航需求,是否存在安全风险。
[0177]
2)、拖轮需求风险,指的是船舶计划的拖轮安排是否满足拖轮需求,是否存在安全风险。
[0178]
st2、定义安全因素,并为各个风险待评估项目匹配安全规则,其还包括:定义引航需求规则和拖轮需求规则为安全规则,建立对应函数,并匹配至对应的风险待评估项目。
[0179]
关于上述两个规则,具体地:
[0180]
(11)、引航需求规则:英文标识为piru,是根据船舶类型、计划靠离码头、船舶长度、船舶计划吃水、船舶载重吨获取引航需求标志的一个函数集合,代表符号为f(shpl.sht,shpl.dock,shpl.shl,shpl.pdr,shpl.dwt),shpl.sht代表船舶类型,shpl.dock代表计划靠离码头,shpl.shl代表船舶长度,shpl.pdr代表船舶计划吃水,shpl.dwt代表船舶载重吨。
[0181]
函数内部要素包括船舶类型piru.sht、码头piru.dock、船舶长度最小值piru.minl(单位:米)、船舶长度最大值piru.maxl(单位:米)、船舶计划吃水最小值piru.mind(单位:米)、船舶计划吃水最大值piru.maxd(单位:米)、船舶载重吨最小值piru.mindwt、船舶载重吨最大值piru.maxdwt、引航需求标志piru.pim。
[0182]
函数应用是获取引航需求标志piru.pim=f(shpl.sht,shpl.dock,shpl.shl,shpl.pdr,shpl.dwt)。
[0183]
(12)、拖轮需求规则:英文标识为tbs,是根据船舶长度、船舶计划吃水、计划泊位、计划类型、船舶类型获取拖轮需求总数、特殊功率拖轮需求数的一个函数集合,代表符号为f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,ele),shpl.shl代表船舶长度,shpl.pdr代表船舶计划吃水,shpl.ber代表计划泊位,shpl.spt代表计划类型,shpl.sht代表船舶类型,ele代表函数内部要素名称。
[0184]
函数内部要素包括大船船长最小值tbs.minl(单位:米)、大船船长最大值tbs.maxl(单位:米)、船舶计划吃水最小值tbs.mind(单位:米)、船舶计划吃水最大值tbs.maxd(单位:米)、泊位tbs.ber、计划类型tbs.spt、船舶类型tbs.sht、拖轮总数最小值tbs.mintbn、拖轮总数最大值tbs.maxtbn、特殊功率类型tbs.sptype、特殊功率拖轮数最小值tbs.minsptbn、特殊功率拖轮数最大值tbs.maxsptbn。
[0185]
函数应用包含获取拖轮需求总数最小值tbs.mintbn=f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,mintbn),获取拖轮需求总数最大值tbs.maxtbn=f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,maxtbn),获取特殊功率类型tbs.sptype=f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,sptype),获取特殊功率拖轮需求数最小值tbs.minsptbn=f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,minsptbn),获取特殊功率拖轮需求数最大值tbs.maxsptbn=f(shpl.shl,shpl.pdr,shpl.ber,shpl.spt,shpl.sht,maxsptbn)。
[0186]
在上述基础上,为引航需求风险建立的安全评估逻辑,其包括:
[0187]
传入船舶类型shpl.sht、计划靠离码头shpl.dock、船舶长度shpl.shl、船舶计划吃水shpl.pdr、船舶载重吨shpl.dwt、计划引航标志shpl.pim;
[0188]
调用引航需求规则函数,获取引航需求标志piru.pim;
[0189]
将各数据代入计算公式5:shpl.pim=piru.pim,判断公式5是否成立,并记录风险评估信息,如果成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0190]
汇总风险评估信息、风险权重值,结束流程。
[0191]
为拖轮需求风险建立的安全评估逻辑,其包括:
[0192]
传入船舶长度shpl.shl、船舶计划吃水shpl.pdr、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、船舶类型shpl.sht、拖轮总数shpl.tbn、拖轮清单shpl.tuglist[拖轮功率shpl.tugtype][拖轮功率对应数量shpl.ttnum];
[0193]
调用拖轮需求规则函数,获取拖轮需求总数最小值tbs.mintbn、拖轮需求总数最大值tbs.maxtbn、特殊功率类型tbs.sptype、特殊功率拖轮需求数最小值tbs.minsptbn、特殊功率拖轮需求数最大值tbs.maxsptbn;
[0194]
将各数据代入计算公式6-1:total(tbn)=shpl.tbn∈[tbs.mintbn,tbs.maxtbn];
[0195]
将各数据代入计算公式6-2:ttamount=(shpl.tugtype1,shpl.ttnum1) (shpl.tugtype2,shpl.ttnum2) ... (shpl.tu gtypen,shpl.ttnumn),计算拖轮功率大于需求的拖轮总数;
[0196]
将各数据代入计算公式6-3:sp(tta)=ttamount∈[tbs.minsptbn,tbs.maxsptbn],判断公式6-3是否成立,并记录风险评估信息;
[0197]
将公式6-1、公式6-3的结果代入公式6:total(tbn)∧sp(tta)=true,判断公式6是否成立,并记录风险评估信息,如果公式成立,则风险权重值=0;如果不成立,则风险权重值=1;
[0198]
汇总风险评估信息、风险权重值,结束流程。
[0199]
实施例6,其与实施例5的区别在于:
[0200]
st1、还包括:对码头是否有空位、船舶是否有对遇碰撞风险进行定义。
[0201]
其中,码头是否有空位,指的是码头是否有充足的空位,船舶靠泊时与停泊在同一个码头的其他船舶是否会存在碰撞风险;其包括:桩位安全冲突风险。
[0202]
桩位安全冲突风险,指的是船舶计划的桩位与其他船舶冲突,不符合桩位规则,存在碰撞安全风险。
[0203]
船舶是否有对遇碰撞风险,指的是船舶在航行过程中是否存在船舶对遇碰撞风险;其包括:
[0204]
1)、泊位安全冲突风险,指的是船舶计划的靠离泊时间、靠离泊位与其他船舶计划冲突,不符合泊位规则,存在碰撞安全风险。
[0205]
2)、交通管制船冲突风险,指的是船舶计划与交通管制船计划冲突,存在对遇碰撞安全风险。
[0206]
3)、单向航道通行权冲突风险,指的是船舶经过单向航道时,由于通行方向冲突,存在对遇碰撞安全风险。
[0207]
对应的,为匹配上述各项的安全逻辑执行,st2,其还包括定义下述安全规则,包括:
[0208]
(13)、桩位安全规则:英文标识为ppru,是根据计划靠离码头、计划前桩位、计划后桩位获取两船间安全警戒值的一个函数集合,代表符号为f(shpl.dock,shpl.prp,shpl.nep),shpl.dock代表计划靠离码头,shpl.prp代表计划前桩位,shpl.nep代表计划后桩位。
[0209]
函数内部要素包括计划码头ppru.dock、允许的开始桩位ppru.bep、允许的结束桩位ppru.enp、两船间安全警戒值ppru.diswv(单位:米)。
[0210]
函数应用是获取包含计划码头、允许的开始桩位、允许的结束桩位、两船间安全警戒值的参数集合,表示为ppru{dock,bep,enp,diswv}=f(shpl.dock,shpl.prp,shpl.nep),运行上述函数得到的结果是多组参数集合。
[0211]
(14)、泊位安全规则:英文标识为beru,是根据计划靠离码头、计划泊位、计划时间、计划类型获取关联码头、关联泊位、关联警戒计划类型、安全警戒开始结束时间的一个函数集合,代表符号为f(shpl.dock,shpl.ber,shpl.plti,shpl.spt),shpl.dock代表计划靠离码头,shpl.ber代表计划泊位,shpl.plti代表计划时间,shpl.spt代表计划类型。
[0212]
函数内部要素包括码头beru.dock、计划泊位beru.ber、计划类型beru.spt、关联码头beru.redo、关联泊位beru.reber、关联警戒计划类型beru.bwty、安全警戒时间beru.bwti(单位:小时)。
[0213]
函数应用是获取包含关联码头beru.redo、关联泊位beru.reber、关联警戒计划类型beru.bwtv、安全警戒开始时间beru.sebeti、安全警戒结束时间beru.seenti的参数集合,表示为beru{redo,reber,bwty,sebeti,seenti}=f(shpl.dock,shpl.ber,shpl.plti,shpl.spt),运行上述函数得到的结果是多组参数集合。
[0214]
(15)、交通管制船规则:英文标识为coru,是根据计划靠离码头、计划泊位、计划类型、计划时间、管制船类型、船舶经过的航道名称获取交通管制船类型、管制船进出口标志、管制船抵达关键节点名称、管制船抵达关键节点的前推时间、管制船抵达关键节点的后延时间的一个函数集合,代表符号为f(shpl.dock,shpl.ber,shpl.spt,shpl.plti,shpl.cst,snp.chan),shpl.dock代表计划靠离码头,shpl.ber代表计划泊位,shpl.spt代表计划类型,shpl.plti代表计划时间,shpl.cst代表管制船类型,snp.chan代表船舶经过的航道名称。
[0215]
函数内部要素包括码头coru.dock、计划泊位coru.ber、计划类型coru.spt、交通管制船类型coru.cst、管制船进出口标志coru.iema、船舶经过的航道名称coru.chan、管制船抵达关键节点名称coru.keypo、前推时间coru.prti(单位:分钟)、后延时间coru.neti(单位:分钟)。
[0216]
函数应用是获取包含交通管制船类型、管制船进出口标志、管制船抵达关键节点名称、管制船抵达关键节点的前推时间、管制船抵达关键节点的后延时间的参数集合,表示为coru{cst,iema,keypo,keyprti,keyneti}=f(shpl.dock,shpl.ber,shpl.spt,shpl.plti,shp1.cst,snp.chan),运行上述函数得到的结果是多组参数集合。
[0217]
(16)、单向航道通行权规则:英文标识为scru,是根据计划靠离码头、计划泊位、计划类型、计划时间、计划指定经过的单向航道名称获取关联码头、关联泊位、关联计划类型、关联计划前推时间、关联计划后延时间的一个函数集合,代表符号为f(shpl.dock,shpl.ber,shpl.spt,shpl.plti,shpl.onch),shpl.dock代表计划靠离码头,shpl.ber代表计划泊位,shpl.spt代表计划类型,shpl.plti代表计划时间,shpl.onch代表计划指定经过的单向航道名称。
[0218]
函数内部要素包括计划靠离码头scru.pldo、计划泊位scru.plber、计划类型scru.plspt、单向航道名称scru.onch、关联靠离码头scru.redo、关联泊位scru.reber、关
联计划类型scru.respt、前推时间scru.prti(单位:分钟)、后延时间scru.neti(单位:分钟)。
[0219]
函数应用是获取包含单向航道名称、关联码头、关联泊位、关联计划类型、关联计划前推时间、关联计划后延时间的参数集合,表示为scru{onch,redo,reber,respt,reprti,reneti}=f(shpl.dock,shpl.ber,shpl.spt,shpl.plti,shpl.onch),运行上述函数得到的结果是多组参数集合。
[0220]
基于上述规则,为本实施例的各个项目匹配的安全评估逻辑,具体地:
[0221]
桩位安全冲突风险评估逻辑,其使用的安全因素如下:
[0222]
1)、本次评估的船舶计划:船舶计划靠离码头shpl.dock、船舶靠泊计划时间shpl.plti-b、船舶离泊计划时间shpl.plti-l、船舶长度shpl.shl、计划前桩位shpl.prp、计划后桩位shpl.nep、计划前桩位的距原点米数shpl.prpd、计划后桩位的距原点米数shpl.nepd;
[0223]
2)、本次评估的关联船舶计划:船舶计划编号otsp.no、船舶计划靠离码头otsp.dock、船舶靠泊计划时间otsp.plti-b、船舶离泊计划时间otsp.plti-l、船舶长度otsp.shl、计划前桩位otsp.prp、计划后桩位otsp.nep、计划前桩位的距原点米数otsp.prpd、计划后桩位的距原点米数otsp.nepd;
[0224]
3)、桩位安全规则:包含计划码头、允许的开始桩位、允许的结束桩位、两船间安全警戒值的参数集合,表示为ppru{dock,bep,enp,diswv}。
[0225]
计算公式如下:
[0226]
公式7包含公式7-1。
[0227]
公式7:本计划船舶长度 另一个计划船舶长度 两船间安全警戒值>=两条船之间的最大桩位距离;
[0228]
shpl.shl otsp..shl ppru.diswv>=maxdp;
[0229]
公式7-1:若本计划前桩位<=另一个计划的后桩位,则两条船之间的最大桩位距离=另一个计划后桩位的距原点米数-本计划前桩位的距原点米数;若另一个计划的前桩位<=本计划的后桩位,则两条船之间的最大桩位距离=本计划后桩位的距原点米数-另一个计划前桩位的距原点米数
[0230]
若shpl.prp<=otsp.nep成立,则maxdp=otsp.nepd-shpl.prpd;
[0231]
若otsp.prp<=shpl.nep成立,则maxdp=shpl.nepd-otsp.prpd;
[0232]
评估流程如下:
[0233]
1)、传入船舶计划靠离码头shpl.dock、船舶靠泊计划时间shpl.plti-b、船舶离泊计划时间shpl.plti-l、船舶长度shpl.shl、计划前桩位shpl.prp、计划后桩位shpl.nep、计划前桩位的距原点米数shpl.prpd、计划后桩位的距原点米数shpl.nepd。
[0234]
2)、调用桩位安全规则函数,获取“计划码头ppru.dock、允许的开始桩位ppru.bep、允许的结束桩位ppru.enp、两船间安全警戒值ppru.diswv”的参数集合。
[0235]
3)、大循环处理每一组参数集合,比对本次评估船舶计划与全部的其他船舶计划。
[0236]
4)、小循环找出关联船舶计划,比对每个关联船舶计划,将各数据代入计算公式7-1,计算两条船之间的最大桩位。
[0237]
5)、将各数据代入计算公式7“本计划船舶长度 另一个计划船舶长度 两船间安全
警戒值>=两条船之间的最大桩位距离”,判断公式7是否成立,并记录风险评估信息。公式7成立风险权重值=1,公式7不成立风险权重值=0。
[0238]
6)、小循环处理完所有关联船舶计划后,结束小循环。
[0239]
7)、大循环处理完所有参数集合后,汇总风险评估信息、风险权重值,结束流程。
[0240]
泊位安全冲突风险评估逻辑,其使用的安全因素如下:
[0241]
1)、本次评估的船舶计划:船舶计划靠离码头shpl.dock、计划泊位(含锚地浮筒)shpl.ber、计划时间shpl.plti、计划类型shpl.spt;
[0242]
2)、本次评估的关联船舶计划:船舶计划编号otsp.no、计划靠离码头otsp.dock、计划泊位(含锚地浮筒)otsp.ber、计划时间otsp.plti、计划类型otsp.spt;
[0243]
3)、泊位安全规则:包含关联码头、关联泊位、关联警戒计划类型、安全警戒开始时间、安全警戒结束时间的参数集合,表示为beru{redo,reber,bwty,sebeti,seenti}。
[0244]
计算公式如下:
[0245]
公式8:其他船舶计划的计划时间∈[安全警戒开始时间,安全警戒结束时间];
[0246]
otsp.plti∈[beru.sebeti,beru.seenti];
[0247]
评估流程如下:
[0248]
1)、传入船舶计划靠离码头shpl.dock、计划泊位(含锚地浮筒)shpl.ber、计划时间shpl.plti、计划类型shpl.spt。
[0249]
2)、调用泊位安全规则函数,获取“关联码头beru.redo、关联泊位beru.reber、关联警戒计划类型beru.bwty、安全警戒开始时间beru.sebeti、安全警戒结束时间beru.seenti”的参数集合。
[0250]
3)、大循环处理每一组参数集合,比对参数集合与全部的其他船舶计划。
[0251]
4)、小循环找出关联船舶计划,比对每个关联船舶计划,将各数据代入计算公式8“其他船舶计划的计划时间∈[安全警戒开始时间,安全警戒结束时间]”,判断公式8是否成立,并记录风险评估信息。公式8成立风险权重值=1,公式8不成立风险权重值=0。
[0252]
5)、小循环处理完所有关联船舶计划后,结束小循环。
[0253]
6)、大循环处理完所有参数集合后,汇总风险评估信息、风险权重值,结束流程。
[0254]
交通管制船冲突风险评估逻辑,使用的安全因素如下:
[0255]
1)、本次评估的船舶计划:船舶计划靠离码头shpl.dock、船舶当前位置(含泊位锚地浮筒)shpl.cube、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、计划时间shpl.plti、管制船类型shpl.cst;
[0256]
2)、船舶航行路径:船舶经过的航道序号snp.num、船舶经过的航道名称snp.chan;
[0257]
3)、交通管制计划:交通管制计划编号tcp.no、交通管制船类型tcp.cst、管制船进出口标志tcp.iema、管制船抵达关键节点名称tcp.keypo、管制船抵达关键节点的计划时间tcp.keyti;
[0258]
4)、交通管制船规则:包含交通管制船类型、管制船进出口标志、管制船抵达关键节点名称、管制船抵达关键节点的前推时间、管制船抵达关键节点的后延时间的参数集合,表示为coru{cst,iema,keypo,keyprti,keyneti}。
[0259]
计算公式如下:
[0260]
公式9:管制船抵达关键节点的计划时间∈[管制船抵达关键节点的前推时间,管
制船抵达关键节点的后延时间];
[0261]
tcp.keyti∈[coru.keyprti,coru.keyneti];
[0262]
评估流程如下:
[0263]
1)、传入船舶计划靠离码头shpl.dock、船舶当前位置(含泊位锚地浮筒)shpl.cube、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、计划时间shpl.plti、管制船类型shpl.cst。
[0264]
2)、调用船舶航行路径函数,获取船舶经过的航道序号snp.num、船舶经过的航道名称snp.chan。
[0265]
3)、把船舶计划信息、船舶经过的航道信息传入调用交通管制船规则函数,获取“交通管制船类型coru.cst、管制船进出口标志coru.iema、管制船抵达关键节点名称coru.keypo、管制船抵达关键节点的前推时间coru.keyprti、管制船抵达关键节点的后延时间coru.keyneti”的参数集合。
[0266]
4)、大循环处理每一组参数集合,比对参数集合与全部的交通管制计划。
[0267]
5)、小循环找出关联交通管制计划,比对每个关联交通管制计划,将各数据代入计算公式9“管制船抵达关键节点的计划时间∈[管制船抵达关键节点的前推时间,管制船抵达关键节点的后延时间]”,判断公式9是否成立,并记录风险评估信息。公式9成立风险权重值=1,公式9不成立风险权重值=0。
[0268]
6)、小循环处理完所有关联交通管制计划后,结束小循环。
[0269]
7)、大循环处理完所有参数集合后,汇总风险评估信息、风险权重值,结束流程。
[0270]
单向航道通行权冲突风险评估逻辑,使用的安全因素如下:
[0271]
1)、本次评估的船舶计划:船舶计划靠离码头shpl.dock、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、计划时间shpl.plti、计划指定经过的单向航道shpl.onch;
[0272]
2)、本次评估的关联船舶计划:船舶计划编号otsp.no、计划靠离码头otsp.dock、计划泊位(含锚地浮筒)otsp.ber、计划类型otsp.spt、计划时间otsp.plti、计划指定经过的单向航道otsp.onch;
[0273]
3)、单向航道通行权规则:包含单向航道名称、关联码头、关联泊位、关联计划类型、关联计划前推时间、关联计划后延时间的参数集合,表示为scru{onch,redo,reber,respt,reprti,reneti}。
[0274]
计算公式如下:
[0275]
公式10:其他船舶计划的计划时间∈[关联计划前推时间,关联计划后延时间];
[0276]
otsp.plti∈[scru.reprti,scru.reneti];
[0277]
评估流程如下:
[0278]
1)、传入船舶计划靠离码头shpl.dock、计划泊位(含锚地浮筒)shpl.ber、计划类型shpl.spt、计划时间shpl.plti、计划指定经过的单向航道shpl.onch。
[0279]
2)、调用单向航道通行权规则函数,获取“单向航道名称scru.onch、关联码头scru.redo、关联泊位scru.reber、关联计划类型scru.respt、关联计划前推时间scru.reprti、关联计划后延时间scru.reneti”的参数集合。
[0280]
3)、大循环处理每一组参数集合,比对参数集合与全部的其他船舶计划。
[0281]
4)、小循环找出关联船舶计划,比对每个关联船舶计划,将各数据代入计算公式8“其他船舶计划的计划时间∈[关联计划前推时间,关联计划后延时间]”,判断公式8是否成立,并记录风险评估信息。公式10成立风险权重值=1,公式10不成立风险权重值=0。
[0282]
5)、小循环处理完所有关联船舶计划后,结束小循环。
[0283]
6)、大循环处理完所有参数集合后,汇总风险评估信息、风险权重值,结束流程。
[0284]
综上所述,本技术所述的船舶靠离泊调度计划的安全性评估包含了多因素多场景多规则的评估流程;比对低效的人工分析,应用本技术的评估模型能实现业务系统自动快速评估,瞬间完成复杂的评估流程,极大提高分析效率。
[0285]
本技术完善的多因素评估能最大限度减少分析结果误差,船舶靠离泊调度计划的安全性评估包含了5大场景10个评估项目,囊括了船舶靠离泊过程中存在的所有风险因素;同时,因为本技术针对每个风险因素分别进行独立评估,再汇总综合分析,所以能最大限度减少分析结果误差。
[0286]
以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。