基于树莓派的agv教学演示系统
技术领域
1.本发明涉及教学演示技术领域,特别涉及一种基于树莓派的agv教学演示系统。
背景技术:
2.随着消费结构升级,市场竞争与客户的个性化需求使现代制造业中多品种、中小批量生产所占的比重越来越大,传统刚性制造无法满足市场对产品个性化、定制化、时效性要求的问题日益突出,“多样化、小规模、周期可控”的柔性制造成为制造业企业转型升级的关键。自动导引运输车(automated guided vehicle,agv)因其可以灵活地重组物料运输达到柔性化运输的效果,成为柔性制造系统中链接和调配物资作业连续化的重要工具。
3.培养各类agv应用技术人才,是发展柔性化装备制造的迫切需要,加大agv本体和软件系统研发,发展具有自主知识产权的agv技术,更是新形势下产业创新发展的战略需要。然而,工业生产中的agv成本高昂、设备体积较大,不便于课堂实验教学和软件系统开发验证。因此需要一种成本低廉、便于教学演示的具有完整自动导引车功能的演示方法,从而提高学校等培训机构的agv实验教学和软件开发人员功能验证的便利性。
4.
技术实现要素:
5.根据本发明实施例,提供了一种基于树莓派的agv教学演示系统,包含:树莓派,用于进行数据的中心处理;车辆底盘,车辆底盘与树莓派电性连接,用于进行演示agv车辆的自动行驶功能;背负托盘,背负托盘与树莓派电性连接,用于进行演示agv车辆装载和卸载货品功能;循迹模块,循迹模块与树莓派电性连接,用于进行演示agv车辆按照指定路径进行自动驾驶功能;避障模块,避障模块与树莓派电性连接,用于进行演示agv车辆自动防碰撞功能;控制主机,控制主机与树莓派通讯连接,用于进行演示获取agv车辆状态和发送调度指令功能;语音模块,语音模块与树莓派电性连接,用于进行演示播报agv车辆状态和当前接收调度指令功能;电源模块,电源模块与树莓派电性连接,用于提供电能。
6.进一步,车辆底盘包含:电机驱动模块,电机驱动模块与树莓派的gpio接口连接;电机,电机与电机驱动模块相连;车轮,车轮与电机相连。
7.进一步,车轮为橡胶轮。
8.进一步,背负推盘包含:
舵机驱动模块,舵机驱动模块与树莓派的gpio接口连接;舵机,舵机与舵机驱动模块相连;摆臂,摆臂与舵机相连;托盘,托盘与摆臂相连。
9.进一步,循迹模块包含:五个红外传感器,五个红外传感器安装在车辆底盘上,且与树莓派的gpio接口连接。
10.进一步,避障模块包含:超声波测距传感器,超声波测距传感器设置在车辆底盘上,且与树莓派的gpio接口连接。
11.进一步,控制主机与树莓派通过无线wifi进行数据通信。
12.进一步,树莓派的型号为zero w型。
13.进一步,电源模块为无线充电供电电源模块,用于进行无线充电供电。
14.根据本发明实施例的基于树莓派的agv教学演示系统,本案采用树莓派作为主控制器,通过各模块之间的信息交互,模拟实现工业生产中agv运输、载物等功能,而且树莓派预留有各类数字和通信接口,扩展性强,安装的linux系统方便学生和软件开发人员学习开发agv应用软件,方便以该演示系统为基础的各类agv应用设计。
15.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
16.附图说明
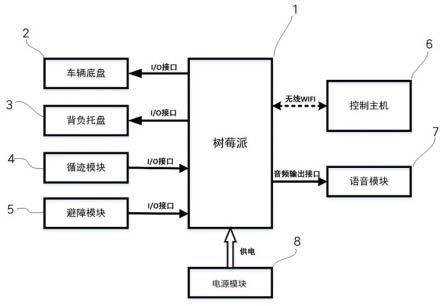
17.图1为根据本发明实施例基于树莓派的agv教学演示系统的整体结构图。
18.具体实施方式
19.以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
20.首先,将结合图1描述根据本发明实施例的基于树莓派的agv教学演示系统,用于模拟实现工业生产中agv运输、载物等功能,其应用场景很广。
21.如图1所示,本发明实施例的基于树莓派的agv教学演示系统,具有树莓派1、车辆底盘2、背负托盘3、循迹模块4、避障模块5、控制主机6、语音模块7以及电源模块8。
22.具体地,如图1所示,在本实施例中,树莓派1用于进行数据的中心处理,树莓派1是一款基于arm的微型电脑主板,以sd卡为内存硬盘,可通过gpio接口控制相应的硬件设备,具有完整的计算机处理功能,基于linux的通用开发平台,方便人员学习开发;车辆底盘2与树莓派1电性连接,用于进行演示agv车辆的自动行驶功能;背负托盘3与树莓派1电性连接,用于进行演示agv车辆装载和卸载货品功能;循迹模块4与树莓派1电性连接,用于进行演示agv车辆按照指定路径进行自动驾驶功能;避障模块5与树莓派1电性连接,用于进行演示agv车辆自动防碰撞功能;控制主机6与树莓派1通讯连接,用于进行演示获取agv车辆状态和发送调度指令功能;语音模块7与树莓派1电性连接,用于进行演示播报agv车辆状态和当前接收调度指令功能;电源模块8与树莓派1电性连接,用于提供电能。通过树莓派1与车辆底盘2、背负托盘3、循迹模块4、避障模块5、控制主机6以及语音模块7相互配合,从而进行
agv车辆相应功能的演示,具有成本低廉、扩展性强的优点,便于开发学习。
23.进一步,在本实施例中,车辆底盘2包含:电机驱动模块、电机以及车轮(图上未示出)。电机驱动模块与树莓派1的gpio接口连接;电机与电机驱动模块相连;车轮与电机相连,车轮可选用橡胶轮。其中电机驱动车轮转动,电机可选用减速比达1:30的n20维修减速电机,以稳定控制演示方法形式,电机由电机驱动模块控制,电机驱动模块采用tb6612fng双h桥电机驱动芯片,并通过树莓派1控制电机驱动模块,从而控制agv车辆自动行驶。
24.进一步,在本实施例中,背负推盘包含:舵机驱动模块、舵机、摆臂以及托盘(图上未示出)。舵机驱动模块与树莓派1的gpio接口连接;舵机与舵机驱动模块相连;摆臂与舵机相连;托盘与摆臂相连。其中,托盘用于放置货品,摆臂在舵机的驱动下推动托盘演示卸载货品功能,舵机由舵机驱动模块控制,舵机驱动模块可选用pac9685芯片,控制舵机不抖动,更加稳定,并通过树莓派1控制舵机驱动模块,从而控制agv车辆装载和卸载货品。
25.进一步,在本实施例中,循迹模块4包含:五个红外传感器(图上未示出),五个红外传感器安装在车辆底盘2的背面,红外传感器可选用反射式红外光电传感器itr20001/t,红外传感器输出值经过模数转换后与树莓派1的gpio接口连接,树莓派1读取到各路红外传感器数据后,根据pid控制算法,控制agv车辆按照路径行驶。
26.进一步,在本实施例中,避障模块5包含:超声波测距传感器(图上未示出),超声波测距传感器设置在车辆底盘2的前方,且与树莓派1的gpio接口连接,树莓派1程序判断agv车辆正前方有障碍物时,具有控制agv车辆停止行驶的功能。
27.进一步,在本实施例中,控制主机6预设安装有agv调度软件,控制主机6与树莓派1通过无线wifi进行数据通信。
28.进一步,如图1所示,在本实施例中,树莓派1的型号为zero w型,具有体积小、功耗低的效果。
29.进一步,在本实施例中,电源模块8为无线充电供电电源模块,且无线充电供电电源模块通过电源开关与车辆底盘2和树莓派1连接,给系统的其他模块进行供电,可用于演示agv车辆自动充电功能。
30.使用时候,通过树莓派1获取各路红外传感器数据后,根据pid控制算法,树莓派1让车辆底盘2内的车轮进行相应转动,从而控制agv车辆按照预设路径行驶;并且通过树莓派1获取超声波测距传感器的数据并处理后,当agv车辆正前方有障碍物时,树莓派1会控制车辆底盘2内的车轮停止,使得agv车辆停止行驶。当需要进行装载或卸载货品时,通过树莓派1控制背负托盘3,从而进行装载或卸载货品。控制主机6可从树莓派1获取agv车辆状态,并发送调度指令给树莓派1,树莓派1将接收到的调度指令以及agv车辆状态发送至语音模块7,语音模块7进行播报agv车辆状态和当前接收调度指令。通过上述基于树莓派的agv教学演示系统各个功能的运行,从而演示agv车辆具有的相应功能。
31.以上,参照图1描述了根据本发明实施例的基于树莓派的agv教学演示系统,本案采用树莓派1作为主控制器,通过各模块之间的信息交互,模拟实现工业生产中agv运输、载物等功能,而且树莓派1预留有各类数字和通信接口,扩展性强,安装的linux系统方便学生和软件开发人员学习开发agv应用软件,方便以该演示系统为基础的各类agv应用设计。
32.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要
素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
33.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。