1.本技术涉及机械夹爪的领域,尤其是涉及一种具有缓冲功能的机械设备制造用机械夹爪。
背景技术:
2.机械夹爪和传送机构又被形象的称之为手部和臂部,其中,抓取机构包括有手指和传力机构,在工作中起到对物件进行抓取和放置的作用,上下料机械夹爪的传送机构则包含了手腕和手臂等结构,在实践当中可以用来改变物件的方位以及位置。
3.目前,机械夹爪在机械设备制造中有着广泛的运用,但其在使用时仍存在一定的不便性,在机械夹爪的使用过程中,缺少缓冲功能,无法机械夹爪的夹持力度进行便捷控制,导致在对不同的物体进行夹持时,易导致物体受损。
4.针对上述中的相关技术,发明人认为机械夹爪存在有控制不便的缺陷。
技术实现要素:
5.为了解决背景技术中提出的问题,本技术提供一种具有缓冲功能的机械设备制造用机械夹爪。
6.本技术提供的一种具有缓冲功能的机械设备制造用机械夹爪采用如下的技术方案:
7.一种具有缓冲功能的机械设备制造用机械夹爪,包括夹爪主体,所述夹爪主体的下表面滑动连接有若干个夹爪夹臂,所述夹爪夹臂的内壁中滑动连接有若干个按压板,所述夹爪夹臂的内壁中固定连接有压力传感器,所述夹爪夹臂的内壁中滑动连接有滑动轴,所述按压板的下表面固定连接有若干个支撑弹簧,所述按压板的下表面转动连接有转动架。
8.通过采用上述技术方案,使得按压板下压时转动的转动架会推动滑动轴向压力传感器处移动,再通过滑动轴的另一端对压力传感器进行按压,在按压板下压至与夹爪夹臂的外表面相平齐时,滑动轴完成对压力传感器的按压,将按压信号通过压力传感器传输至夹爪主体处,此时若干个夹爪夹臂正好对物体进行稳定夹持,夹爪夹臂不在继续对物体进行加大力度夹持,从而避免物体夹持过度损坏,进而便于控制夹持。
9.优选的,所述夹爪夹臂的内壁中固定连接有承接架,所述滑动轴通过所述承接架滑动连接于所述夹爪夹臂的内壁中,所述承接架的侧表面固定连接有缓冲弹簧,且所述滑动轴套接于所述缓冲弹簧的内部。
10.通过采用上述技术方案,使得滑动轴能够通过承接架滑动连接于夹爪夹臂的内部,同时在承接架的侧表面固定连接有缓冲弹簧,且将缓冲弹簧套接于滑动轴的外表面,从而使得转动架在推动滑动轴进行移动时,滑动轴可以通过承接架滑动对压力传感器进行按压,在按压板恢复原位时,滑动轴也通过缓冲弹簧恢复原位。
11.优选的,所述按压板的下表面转动连接有若干个扭力弹簧,所述转动架通过所述
扭力弹簧弹性转动连接于所述按压板的下表面,所述转动架的另一端转动连接有滑轮。
12.通过采用上述技术方案,使得转动架能够通过扭力弹簧弹性转动连接于按压板的下表面,使得转动架能够便于跟随按压板上升或下降进行便捷调节,同时在转动架的外表面背离扭力弹簧的一端转动连接有滑轮,使得按压板在下压时,转动架在转动过程中,可以通过滑轮进行辅助滑动转动。
13.优选的,所述夹爪夹臂的内部开设有缓冲槽,所述按压板通过所述缓冲槽滑动连接于所述夹爪夹臂的外表面。
14.通过采用上述技术方案,使得若干个按压板能够通过若干个缓冲槽滑动连接于夹爪夹臂的外表面进行使用,从而避免按压板在使用时会出现晃动偏斜的问题。
15.优选的,所述夹爪夹臂的外表面位于所述按压板的侧表面固定连接有若干个加强板。
16.通过采用上述技术方案,使得按压板在下压感应过程中,夹爪夹臂会通过两个板状的加强板对物体进行夹持,并设置加强板的外表面刻有防滑纹路,使得夹爪夹臂通过加强板进行夹持时更加稳定。
17.综上所述,本技术包括以下有益技术效果:
18.通过设置有夹爪主体和若干个夹爪夹臂,使得夹爪主体能够通过若干个夹爪夹臂进行夹持作业,并在夹爪夹臂的内壁中设置有压力传感器,使得夹爪夹臂在对物体进行夹持时,按压板会先与物体进行接触,并推动夹爪夹臂内部的转动架和滑动轴,使得滑动轴会推动压力传感器,将感应信号传递至夹爪主体处,此时若干个夹爪夹臂正好对物体进行稳定夹持,夹爪夹臂不在继续对物体进行加大力度夹持,从而避免物体夹持过度损坏,进而便于控制夹持。
附图说明
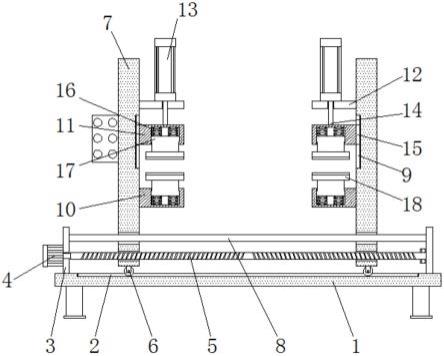
19.图1是申请实施例的机械夹爪的整体结构示意图;
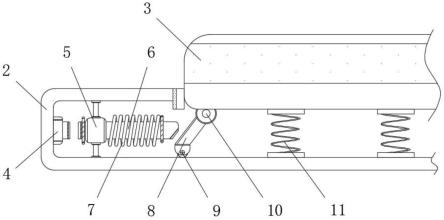
20.图2是申请实施例的夹爪夹臂的内部缓冲结构示意图;
21.图3是申请实施例的按压板的连接结构示意图。
22.附图标记说明:1、夹爪主体;2、夹爪夹臂;3、按压板;4、压力传感器;5、承接架;6、滑动轴;7、缓冲弹簧;8、转动架;9、滑轮;10、扭力弹簧;11、支撑弹簧;12、加强板;13、缓冲槽。
具体实施方式
23.以下结合附图1-3对本技术作进一步详细说明。
24.本技术实施例公开一种具有缓冲功能的机械设备制造用机械夹爪。参照图1和图2,一种具有缓冲功能的机械设备制造用机械夹爪,包括架状的夹爪主体1,并在夹爪主体1的下表面滑动连接有若干个杆架状的夹爪夹臂2,使得夹爪主体1能够通过若干个夹爪夹臂2进行夹持作业,且在夹爪夹臂2的外表面滑动连接有若干个板状的按压板3,使得夹爪主体1在通过若干个夹爪夹臂2进行夹持时,可以通过按压板3进行滑动缓冲感应,以此便于对不同体积的物体进行调节夹持,避免物体夹持过度而损坏;
25.同时在按压板3的下表面固定连接有若干个支撑弹簧11,使得按压板3能够在夹爪
夹臂2的外表面进行弹性滑动连接,并在按压板3的下表面弹性转动连接有转动架8,使得按压板3进行下压滑动时,会推动转动架8进行转动,其次在夹爪夹臂2的内壁中滑动连接有圆轴状的滑动轴6,并在夹爪夹臂2的内壁中滑动连接有压力传感器4,使得按压板3下压时转动的转动架8会推动滑动轴6向压力传感器4处移动,再通过滑动轴6的另一端对压力传感器4进行按压,在按压板3下压至与夹爪夹臂2的外表面相平齐时,滑动轴6完成对压力传感器4的按压,将按压信号通过压力传感器4传输至夹爪主体1处,此时若干个夹爪夹臂2正好对物体进行稳定夹持,夹爪夹臂2不在继续对物体进行加大力度夹持,从而避免物体夹持过度损坏,进而便于控制夹持。
26.参照图2,在夹爪夹臂2的内壁中固定连接有圆筒状的承接架5,并设置滑动轴6贯穿承接架5的内部,使得滑动轴6能够通过承接架5滑动连接于夹爪夹臂2的内部,同时在承接架5的侧表面固定连接有缓冲弹簧7,且将缓冲弹簧7套接于滑动轴6的外表面,从而使得转动架8在推动滑动轴6进行移动时,滑动轴6可以通过承接架5滑动对压力传感器4进行按压,在按压板3恢复原位时,滑动轴6也通过缓冲弹簧7恢复原位。
27.参照图2,在按压板3的下表面转动连接有扭力弹簧10,使得转动架8能够通过扭力弹簧10弹性转动连接于按压板3的下表面,使得转动架8能够便于跟随按压板3上升或下降进行便捷调节,同时在转动架8的外表面背离扭力弹簧10的一端转动连接有滑轮9,使得按压板3在下压时,转动架8在转动过程中,可以通过滑轮9进行辅助滑动转动。
28.参照图1和图3,在夹爪夹臂2的外表面开设有若干个方形槽状的缓冲槽13,使得若干个按压板3能够通过若干个缓冲槽13滑动连接于夹爪夹臂2的外表面进行使用,从而避免按压板3在使用时会出现晃动偏斜的问题。
29.参照图3,在夹爪夹臂2的外表面,位于按压板3的两侧处均固定连接有加强板12,使得按压板3在下压感应过程中,夹爪夹臂2会通过两个板状的加强板12对物体进行夹持,并设置加强板12的外表面刻有防滑纹路,使得夹爪夹臂2通过加强板12进行夹持时更加稳定。
30.本技术实施例一种具有缓冲功能的机械设备制造用机械夹爪的实施原理为:通过设置架状的夹爪主体1,并在夹爪主体1的下表面滑动连接有若干个杆架状的夹爪夹臂2,使得夹爪主体1能够通过若干个夹爪夹臂2进行夹持作业,且在夹爪夹臂2的外表面滑动连接有若干个板状的按压板3,使得夹爪主体1在通过若干个夹爪夹臂2进行夹持时,可以通过按压板3进行滑动缓冲感应,以此便于对不同体积的物体进行调节夹持,避免物体夹持过度而损坏,同时在按压板3的下表面固定连接有若干个支撑弹簧11,使得按压板3能够在夹爪夹臂2的外表面进行弹性滑动连接,并在按压板3的下表面弹性转动连接有转动架8,使得按压板3进行下压滑动时,会推动转动架8进行转动,其次在夹爪夹臂2的内壁中滑动连接有圆轴状的滑动轴6,并在夹爪夹臂2的内壁中滑动连接有压力传感器4,使得按压板3下压时转动的转动架8会推动滑动轴6向压力传感器4处移动,再通过滑动轴6的另一端对压力传感器4进行按压,在按压板3下压至与夹爪夹臂2的外表面相平齐时,滑动轴6完成对压力传感器4的按压,将按压信号通过压力传感器4传输至夹爪主体1处,此时若干个夹爪夹臂2正好对物体进行稳定夹持,夹爪夹臂2不在继续对物体进行加大力度夹持,从而避免物体夹持过度损坏,进而便于控制夹持。
31.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。