1.本发明实施例涉及风电设施维护装置技术领域,具体涉及一种在役风电塔筒外壁防护层现场自动再制造系统与方法。
背景技术:
2.风力发电作为一项新型清洁能源,应用前景非常广泛,风力发电装置一般设置在风力多发地区,一般沿海地区较多,风力发电设施在运行过程中,因所在地的气候以及风中的粒子成分不同,容易腐蚀风力发电设施,从而降低其使用寿命。
3.风力发电运营中,需要定期的进行维护,主要是对于风力发电塔筒表面进行防腐处理,以及塔筒表面的附着物的清理,由于塔筒高度原因,清理过程相对复杂,急需能够有效、安全清理塔筒表面的装置。
技术实现要素:
4.为此,本发明实施例提供一种在役风电塔筒外壁防护层现场自动再制造系统与方法,以实现能够安全、有效的清理与维护风力发电的塔筒表面,以提高塔筒的使用寿命的目的。
5.为了实现上述目的,本发明的实施方式提供如下技术方案:
6.在本发明的实施方式的第一方面中,提供了一种在役风电塔筒外壁防护层现场自动再制造系统,包括塔筒爬壁机器人与控制线
7.其中,塔筒爬壁机器人包括箱式结构的机器人本体,所述机器人本体的底部设有电磁装置,所述机器人本体的顶部设有能够沿机器人本体前后方向移动的作业平台,所述作业平台上设有电磨装置和喷涂装置,所述机器人本体的前后两个端面上设有行走装置,所述机器人本体的前端位置处设有视觉装置;
8.其中,所述机器人本体的前后两个端面上设有稳定板,两个所述行走装置分别安装在稳定板上,所述行走装置包括前桥固定架,所述前桥固定架上通过栓轴安装有前桥板,所述前桥板的对称两侧的端部设有可内向调节的驱动轮组件,相对的驱动轮组件能够相对翻转呈环抱状。
9.进一步地,所述稳定板为匚字形结构,所述稳定板的端面上纵向设置条形孔,所述前桥固定架通过调节螺栓固定在条形孔内,所述前桥板为倒置的等腰三角型结构,所述栓轴连接在所述前桥板的几何中心点处,所述驱动轮组件包括通过铰链连接前桥加紧支座,驱动轮通过驱动电机轮支架固定在前桥加紧支座上,所述前桥加紧支座与前桥板之间通过前桥夹紧气缸连接,所述驱动电机轮支架为角铁结构,其中一个板结构与前桥加紧支座通过摆动电机连接,另一个板结构固定在轮轴上,所述轮轴的内向延长端上设置驱动轮。
10.进一步地,所述作业平台包括固定在所述机器人本体上的滑轨,所述滑轨的一端设有直线电机,所述滑轨上设有能够沿滑轨的轨道滑动的滑台,所述滑台上设有与滑轨的轨道水平方向垂直的伸缩定位套,所述伸缩定位套的两端分别通过俯仰调节装置连接电磨
装置和喷涂装置。
11.进一步地,所述俯仰调节装置包括设置在伸缩定位套内部并具有t型连接结构的伸缩杆,所述伸缩杆的水平端连接安装支架,所述安装支架的端部设有电磨装置或喷涂装置,所述伸缩杆的垂直端通过调节气缸连接安装支架的相对侧的端部。
12.进一步地,所述安装支架的活动端具有向调节气缸一侧弯曲的曲柄结构,所述电磨装置或喷涂装置设置在曲柄结构上侧,所述调节气缸连接曲柄结构的内侧。
13.进一步地,所述电磨装置包括固定安装在曲柄结构上的电磨安装支架,所述电磨安装支架内设置电磨驱动电机,所述喷涂装置包括固定安装在曲柄结构上的喷枪安装支架,所述喷枪安装支架上设有喷枪固定夹,所述喷枪固定夹夹持有喷枪。
14.进一步地,所述电磨安装支架与喷枪安装支架均包括位于曲柄结构上侧的板件,所述板件的底部设有向下延伸且位于曲柄结构两侧的辅支撑件,所述调节气缸连接在辅支撑件上。
15.进一步地,所述视觉装置设置在稳定板上,所述视觉装置包括摄像头安装支架,所述摄像头安装支架的顶部设有控制盒,所述控制盒的对称两侧设有摄像头,所述控制盒上设有通讯天线。
16.进一步地,所述电磁装置包括固定安装在机器人本体底部的电磁铁固定支架,所述电磁铁固定支架的对称两侧设有通过调节轴连接的电磁铁夹紧臂,所述电磁铁夹紧臂的端部设有电磁铁,所述机器人本体底部还设有磁体。
17.一种在役风电塔筒外壁防护层现场自动再制方法,包括如权利要求1-9任一项所述的塔筒爬壁机器人与控制线,具体包括如下步骤
18.a.确定套筒表面状态:通过操作专有的塔筒爬壁机器人,对塔筒表面检测、扫描,并形成塔筒表面图谱;
19.b.根据塔筒表面的程度确定对不同区域进行相应的标记,标记依据套筒表面的磨损程度、腐蚀程度、风化程度以及裂痕状态;
20.c.操作塔筒爬壁机器人根据首次扫描路径以及图谱信息,对标记区域逐个进行打磨、喷涂作业;
21.所述步骤a中,通过塔筒爬壁机器人对塔筒外壁的扫描过程包括,将塔筒纵向划分为3个条形区域,以塔筒爬壁机器人所在中线为准,向两侧展开形成扇形扫描区域,将三个扫描区域通过图像拼接软件拼接后,形成塔筒平面图;
22.步骤b中,根据已近设定的标记状态,通过不同的颜色将不同程度的塔筒表面进行标记,确定修复难度其中修复难度由高到低为磨损程度、腐蚀程度、风化程度以及裂痕状态,修复过程为由低到高进行处理;
23.步骤c中,打磨、喷涂作业的先后顺序为先进行打磨,后喷涂,喷涂作业的涂装由底漆、中间漆和面漆三道涂装工序组成。
24.本发明系统实施例与现有技术相比,其包括塔筒爬壁机器人与控制线,塔筒爬壁机器人包括箱式结构的机器人本体,机器人本体的底部设有电磁装置,机器人本体的顶部设有能够沿机器人本体前后方向移动的作业平台,作业平台上设有电磨装置和喷涂装置,机器人本体的前后两个端面上设有行走装置,机器人本体的前端位置处设有视觉装置实施作业的塔筒爬壁机器人设计为通过磁力吸附方式,实现在风电塔身外壁上的吸附功能;利
用驱动轮进行转向,实现竖向和横向运动,实现对塔筒外壁进行打磨和喷漆运动作业,采用机器人侧面与塔身平行的直线作业,能够有效的清理塔筒表面的的附着物并进行防腐处理,作业高效、稳定,保障风电塔本身的安全运行;
25.根据本发明的实施方式,该方法通过对塔筒结构表面不同区域的结构的不同处理过程,结合利用专用塔筒爬壁机器人进行作业,具有高效、安全的作业过程,且作业过程可视化,施工工艺更加标准规范。
附图说明
26.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
27.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
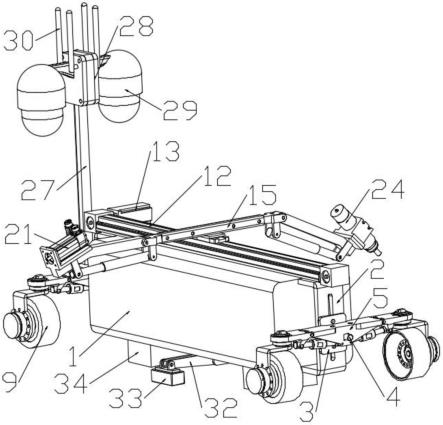
28.图1为本发明实施例提供的在役风电塔筒外壁防护层现场自动再制造系统的塔筒爬壁机器人的立体结构示意图;
29.图2为本发明实施例中塔筒爬壁机器人的主视图;
30.图3为本发明实施例中塔筒爬壁机器人的左视图;
31.图4为本发明实施例中塔筒爬壁机器人的俯视图;
32.图5为本发明实施例中塔筒爬壁机器人的仰视图;
33.图6为本发明实施例中塔筒爬壁机器人的行走装置的立体图;
34.图7为本发明实施例中塔筒爬壁机器人的行走装置的主视图;
35.图8为本发明实施例中塔筒爬壁机器人的作业平台的立体图;
36.图9为本发明实施例中塔筒爬壁机器人的作业平台的主视图;
37.图10为本发明实施例提供的在役风电塔筒外壁防护层现场自动再制造方法的流程图。
38.图中:1、机器人本体;2、稳定板;3、前桥固定架;4、栓轴;5、前桥板;6、前桥加紧支座;7、驱动电机轮支架;8、前桥夹紧气缸;9、驱动轮;10、摆动电机;11、轮轴;12、滑轨;13、直线电机;14、滑台;15、伸缩定位套;16、伸缩杆;17、安装支架;18、调节气缸;19、曲柄结构;20、电磨安装支架;21、电磨驱动电机;22、喷枪安装支架;23、喷枪固定夹;24、喷枪;25、板件;26、辅支撑件;27、摄像头安装支架;28、控制盒;29、摄像头;30、通讯天线;31、电磁铁固定支架;32、电磁铁夹紧臂;33、电磁铁;34、磁体。
具体实施方式
39.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做
出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.本说明书中所引用的如“上”、“下”、“左”、右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
41.如图1-图5所示,其示出了本发明实施例提供的在役风电塔筒外壁防护层现场自动再制造系统,包括塔筒爬壁机器人与控制线,塔筒爬壁机器人包括箱式结构的机器人本体1,机器人本体1的内部设置电源仓以及涂料仓(未示出),机器人本体1的底部设有电磁装置,机器人本体1的顶部设有能够沿机器人本体1前后方向移动的作业平台,作业平台上设有电磨装置和喷涂装置,机器人本体1的前后两个端面上设有行走装置,机器人本体1的前端位置处设有视觉装置;视觉装置能够实现通过摄像查看以及记录塔筒表面的清理作业状态以及需要处理的部位,本产品的机器人能够实现远程遥控或者有线控制,实现工作人员在地面完成对塔筒表面打磨或者喷涂作业。
42.其中,机器人本体1的前后两个端面上设有稳定板2,两个行走装置分别安装在稳定板2上,行走装置包括前桥固定架3,前桥固定架3上通过栓轴4安装有前桥板5,前桥板5的对称两侧的端部设有可内向调节的驱动轮9组件,相对的驱动轮9组件能够相对翻转呈环抱状,即两个驱动轮9组价能够实现向同一方向的相对内侧弯曲,从而实现攀附在圆形塔筒外壁上的作用。
43.实施作业的塔筒爬壁机器人设计为通过磁力吸附方式,实现在风电塔身外壁上的吸附功能;利用驱动轮9进行转向,实现竖向和横向运动,实现对塔筒外壁进行打磨和喷漆运动作业,采用机器人侧面与塔身平行的直线作业,能够有效的清理塔筒表面的的附着物并进行防腐处理,作业高效、稳定,保障风电塔本身的安全运行。
44.在本实施例中,稳定板2为匚字形结构,稳定板2的端面(即纵向板件25)上纵向设置条形孔,前桥固定架3通过调节螺栓固定在条形孔内,条形孔的设置能够实现安装在前桥固定架3上的前桥板5及驱动轮9组件整体沿机器人本体1纵向调节,以能够适应不同直径的塔筒的攀爬作业。
45.其中如图6、图8,前桥板5的侧面为倒置的等腰三角型结构,栓轴4连接在前桥板5的几何中心点处,驱动轮9组件包括与前桥板5铰接的前桥加紧支座6,驱动轮9通过驱动电机轮支架7固定在前桥加紧支座6上,前桥加紧支座6与前桥板5之间通过前桥夹紧气缸8连接。
46.具体的,前桥板5包括平行设置且与前桥加紧支座6连接的应力板,应力板的底侧设有两个纵向的等腰三角形的稳定夹板,栓轴4穿设在稳定夹板的几何中心点处的轴筒内,前桥夹紧气缸8的一端连接在轴筒的外表面上的调节扣上,前桥加紧支座6靠近应力板的位置处具有对接座座,前桥夹紧气缸8的另一端连接在对接座上,通过前桥夹紧气缸8连接的前桥板5与前桥加紧支座6能够实现前桥加紧支座6向前桥板5一侧翻转,从而带动两个驱动轮9相对翻转,本实施例中,前桥板5与前桥加紧支座6保持水平的状态下,夹紧气缸8为伸展后的最大长度,在此状态下,同组的两个驱动轮9水平,当夹紧气缸8向内收缩,两个前桥板5向下(驱动轮所在的方向)翻转,驱动轮9随之翻转形成内向的环抱装,以适应能够附着在塔筒的圆形表面上。
47.具体的本实施例的结构中,驱动电机轮支架7为角铁结构,包括两个垂直连接的板
结构,其中一个板结构与前桥加紧支座6通过摆动电机10连接,另一个板结构固定在轮轴11上,轮轴11的内向延长端上设置驱动轮9,角铁机构的驱动电机轮支架7能够提高同组的两个驱动轮9之间的距离,从而增大适用于直径更大的塔筒表面作业,摆动电机10的设置能够是驱动轮9转向,使机器人本体1能够在塔筒表面上平移作业。
48.本实施例中,作业平台包括固定在机器人本体1上的滑轨12,具体的,滑轨12的两端固定安装在稳定板2的横向板件25上,滑轨12的一端设有直线电机13,滑轨12上设有能够沿滑轨12的轨道滑动的滑台14,滑台14上设有与滑轨12的轨道水平方向垂直的伸缩定位套15,即向机器人本体1左右两侧延伸的伸缩定位套15,且本实施例中滑台14固定在伸缩定位套15的中间位置,伸缩定位套15的两端分别通过俯仰调节装置连接电磨装置和喷涂装置,电磨装置和喷涂装置分别设置在伸缩定位套15的两端,可调节的电磨装置和喷涂装置能够实现对塔筒上的不同角度的位置进行作业处理,提高作业面积以及作业的灵活性。
49.具体的如图8、图9所示,俯仰调节装置包括设置在伸缩定位套15内部并具有t型连接结构的伸缩杆16,伸缩定位套15与伸缩杆16上均设有多个对应的定位孔,定位孔内通过设置圆筒闩固定,可调节伸缩长度的伸缩杆16能够是电磨装置或者喷涂装置的作业范围更大,伸缩杆16的的连接结构的水平连接端与伸缩定位套15相对的另一端的连接安装支架17,安装支架17的端部设有电磨装置或喷涂装置,伸缩杆16的垂直端通过调节气缸18连接安装支架17的相对侧的端部。
50.在本实施例中,安装支架17的活动端具有向调节气缸18一侧弯曲的曲柄结构19,电磨装置或喷涂装置设置在曲柄结构19上侧,调节气缸18连接曲柄结构19的内侧,曲柄结构19的设置增大伸缩定位套15与安装支架17之间的俯仰角度以及延长同等条件下的调节气缸18的驱动距离,即在保持电磨装置或喷涂装置达到相同高度的情况下,适用在直线型的安装支架17的调节气缸18的最大调节距离,只能与安装支架17的长度相同,而具有角度的安装支架17在调解过程中能够实现调剂气缸更大的伸展距离,从而提高作业距离。
51.具体的结构中,电磨装置包括固定安装在曲柄结构19上的电磨安装支架20,电磨安装支架20内设置电磨驱动电机21,电磨驱动电机21上根据实际使用情况设置打磨工具,喷涂装置包括固定安装在曲柄结构19上的喷枪安装支架22,喷枪安装支架22上设有喷枪固定夹23,喷枪固定夹23夹持有喷枪24。
52.其中,电磨安装支架20与喷枪安装支架22均包括位于曲柄结构19上侧的板件25,板件25的底部设有向下延伸且位于曲柄结构19两侧的辅支撑件26,调节气缸18连接在辅支撑件26上,辅支撑件26与曲柄结构19垂直交叉设置。
53.在本实施例中再次参见图10、图3,视觉装置设置在稳定板2上,具体的稳定板2的上安装有支撑平台,视觉装置包括摄像头安装支架27,摄像头安装支架27固定在支撑平台上,摄像头安装支架27的顶部设有控制盒28,控制盒28的对称两侧设有摄像头29,控制盒28上设有通讯天线30,从而实现通过摄像头29实时摄制塔筒表面的情况,进行作业。
54.本实施例中,电磁装置包括固定安装在机器人本体1底部的电磁铁33固定支架31,电磁铁33固定支架31的对称两侧设有通过调节轴连接的电磁铁33夹紧臂32,电磁铁33夹紧臂32的端部通过枢轴连接电磁铁33安装座,电磁铁33固定在电磁铁33伸缩杆16的底部,机器人本体1底部还设有磁体34。
55.本发明的实施例中,电动均通过导线连接在控制盒28处,或者直接通过线缆直接
连接地面控制器,控制盒28连接电源仓,喷涂装置通过导管连接涂料仓,喷枪24为负压喷枪24,通过控制盒28控制驱动。
56.本产品磁体34的总负载能力约为160公斤。机器人本体1及附属结构的重量约为100公斤,需要各项功能都完备了之后,才能确定。去掉机器人本体1重量,剩余为理论负载重量,理论负载重量,与实际还有差距,但要确保负载能够正常完成高空打磨喷漆工作,负载的大小与本机器人的功能无关。电缆及喷漆管线的重量,可以通过悬吊等方式解决。
57.本机器人通过调节驱动轮9的角度适应不同直径的塔筒及变径锥度的塔筒(直径变化从下端的4米逐步变成顶端的3米),最小适应直径为3米;通过安装在机器人本体1上的直线电机13驱动对往复运动实现打磨除锈、喷涂作业运动,打磨工具使用主轴电机驱动钢丝刷进行打磨除锈;该装置高空打磨除锈效果能达到st2.5级别,达到喷漆效果;喷漆功能,通过机器人本身携带的电磁阀控制自动喷枪24,连接无气喷涂机实现,无气喷涂机甲方提供;鉴于风电塔的外形特性,本机器人自带摄像观测功能,通过摄像头29查看和检验打磨的效果,及喷漆的效果。
58.实施例2
59.如图10所示,其示出了本发明实施例提供的一种在役风电塔筒外壁防护层现场自动再制方法,包括上述的塔筒爬壁机器人与控制线,具体包括如下步骤
60.a.确定套筒表面状态:通过操作专有的塔筒爬壁机器人,对塔筒表面检测、扫描,并形成塔筒表面图谱;
61.通过塔筒爬壁机器人对塔筒外壁的扫描过程包括,将塔筒纵向划分为3个条形区域,以塔筒爬壁机器人所在中线为准,向两侧展开形成扇形扫描区域,将三个扫描区域通过图像拼接软件拼接后,形成塔筒平面图;
62.b.根据塔筒表面的程度确定对不同区域进行相应的标记,标记依据套筒表面的磨损程度、腐蚀程度、风化程度以及裂痕状态;
63.根据已近设定的标记状态,通过不同的颜色将不同程度的塔筒表面进行标记,确定修复难度其中修复难度由高到低为磨损程度、腐蚀程度、风化程度以及裂痕状态,修复过程为由低到高进行处理;
64.c.操作塔筒爬壁机器人根据首次扫描路径以及图谱信息,对标记区域逐个进行打磨、喷涂作业;
65.打磨、喷涂作业的先后顺序为先进行打磨,后喷涂,喷涂作业的涂装由底漆、中间漆和面漆三道涂装工序组成。
66.具体的施工方法如下:
67.一、风电塔筒的表面处理
68.主要目的是去除表面污染物,增加表面粗糙度,以达到最佳结合。
69.对比了喷砂、砂纸打磨、高压水冲洗、有机溶剂清洗等方法处理后的表面粗糙度,以及与底漆的结合强度。结果表明,喷砂处理后的表面粗糙度满足要求,且效率很高,确定喷砂工艺为优选工艺。
70.喷砂至最小sa2.5级(iso8501-1:2007),表面平均粗糙度相当于rugotest标准的no.3,n9a到n10,最好bn9a到bn10,keane-tator比较板2.0(喷砂/喷丸),或iso比较板的中等粗糙度(喷砂)。
71.涂有硅酸锌底漆或金属喷涂表面:用适当的清洁剂清除油脂,用(高压)淡水清除盐份和其它污物。清洁度应达到wa2到wa2.5(大气环境)/最小wa2.5(浸没)(参照iso8501-4:2006)。施工前可以接受的最大闪锈度为m(大气环境)/m,最好是l(浸没)(参照iso8501-4:2006)。必须用高压淡水小心冲洗掉锌盐(“白锈”),必要时可用硬尼龙刷擦洗。磨平边角,扫刷掉松散物。高压淡水冲洗后干燥,再干喷砂。
72.建议对金属喷涂表面应尽快涂装以避免表面污染。
73.施工表面必须保证干燥清洁,且环境温度高于露点,以免凝露。
74.二、底漆涂装
75.底漆与塔筒直接结合,干膜厚度一般较厚,在100-200微米之间。且底漆的固含量较高,用辊涂的方式可提高涂层的致密程度,但涂装效率较低。喷涂可大面积快速涂装,但需加溶剂或稀释剂调节粘度,导致固化时间延长(溶剂残留会引起针孔、暗泡等缺陷,而溶剂完全挥发需要时间较长),或对涂层的性能有一定影响(残留的稀释剂可能导致漆膜软化)。
76.可根据使用目的和区域使用非推荐漆膜厚度,也可通过稀释以获得更低的漆膜厚度。重涂间隔与日后暴露的环境有关,如超过了最大重涂间隔,应拉毛表面以确保层间附着力,并保证表面清洁。污染过的表面必须用高压淡水冲洗干净,待表面干燥后,才能进行重涂。
77.在大气环境中,0℃对应的最小重涂间隔为54小时,10℃对应的最小重涂间隔为18小时,20℃对应的最小重涂间隔为6小时。
78.施工方法:无气喷涂/刷涂,
79.稀释剂用量一般不超过5%。
80.混合使用期(无所喷涂):1小时(20℃)
81.混合使用期(刷涂):2小时(20℃)
82.涂膜厚度:湿膜150微米,干膜125微米。
83.三、中间漆涂装
84.中间漆的固含量往往比底漆还高,干膜厚度也更高。为保证粘结强度,应在底漆完全固化且表面清洁的情况下进行中间漆的涂装。涂装可采用辊涂、刮涂、喷涂等方法,如有必要,可适量加入稀释剂。
85.四、面漆涂装
86.面漆漆膜要求比较高,相对于底漆和中间漆,表面平整程度、耐候性、耐磨性及膜的结合强度等性能对整个涂层的影响非常重要。面漆损伤,会影响到整个的涂层防护效果。反之,底漆和中间漆的缺陷也会一定程度影响到面漆,以至整个涂层的防护效果。
87.面漆的体积固含量在50%左右,理论涂布率为10.2米2/升-50微米。20℃时表干时间1小时,透干时间8小时,7天完全固化。
88.施工方法:无气喷涂/刷涂;
89.稀释剂用量一般不超过5%。
90.混合使用期:4小时(20℃)
91.涂膜厚度:湿膜100微米,干膜50微米。
92.施工条件:施工表面要求清洁干燥,温度高于露点以避免凝露。在冰点及冰点以下
施工时必须注意表面结冰而影响漆膜的附着力。
93.施工期间及施工后10小时内(20℃)湿度太大或凝露会影响漆膜的性能,在狭小空间里小施工和干燥期间需大量通风。
94.风机塔筒涂料体系中,面漆的性能起着决定性的作用,但与之配套的底漆对整个防护体系不可缺少的。
95.风机塔筒涂料产品施工质量控制:
96.①
表面处理:塔筒用适当的清洁剂去除油、脂等污物。用高压淡水清洗盐迹和其它污物。喷砂至sa2.5级。表面粗糙度应相当于rugotest标准的no.3,n9a到n10,最好bn9a到bn10,keane-tator比较板2.0(喷砂/喷丸),或iso比较板的中等粗糙度(喷砂);
97.②
底漆:涂料混合后4小时内用完。理论涂布率(60um干膜厚度):10.8平方米/升。
98.建议采用无气喷涂,22mpa压力,喷嘴孔径0.43-0.53mm,喷涂2次后,湿膜厚度100um,干膜厚度60-80um
99.仅在施工和固化得以正常进行的-10℃以上的温度条件下使用。最大施工温度为40℃。油漆本身的温度应高于15℃。最大相对湿度为95%。应特别注意施工和干燥过程中的温度和湿度条件趋向,确保在可接受的范围内,如表1。
[0100][0101]
表1:不同温度下干燥情况(根据膜厚不同,指触干时间不同)
[0102]
③
中间漆:涂料混合后1-2小时内用完(20℃)。理论涂布率(100um干膜厚度):5.76平方米/升。
[0103]
建议采用无气喷涂,25mpa压力,喷枪24孔径0.43-0.58mm,喷涂3次后,湿膜厚度210um,干膜厚度180um。
[0104]
喷涂时,手持喷枪24使喷束始终垂直于表面,并与受涂表面保持30-50cm左右的均匀距离。每一喷道应在前一喷道上重叠50%,少于50%的重叠会使末道漆表面上出现条痕。扣下扳机后,匀速移动喷枪24,因为涂料是匀速流动的,喷幅在50%的重叠时,漆膜覆盖均匀。
[0105]
在整个施工过程中应注意施工温度在5~40℃之间,湿度应小于85%;施工完成后需进行漆膜的检查,包括检查漆膜的外观:平整光滑,无流挂、针孔、气泡、漏涂等弊病;膜厚应达到设计要求,遵循所选测点必须有85%以上测点膜厚大于规定膜厚,且最低膜厚不应低于规定膜厚的85%;附着力的检测:涂层应进行拉开法附着力的检测,所有测点的附着力应高于5mpa,如表2。
[0106][0107]
表2不同温度下干燥情况:
[0108]
④
面漆:涂料混合后4小时内用完(20℃)。理论涂布率(50um干膜厚度):10平方米/升。
[0109]
建议采用无气喷涂,压力15mpa,喷孔孔径0.43-0.48mm,喷涂2次后,湿膜厚度200um,干膜厚度100um。
[0110]
干燥时间20℃
°
:表干1小时,透干8小时,完全固化7天。
[0111]
在整个施工过程中应注意施工温度在5~40℃之间,湿度应小于85%;施工完成后需进行漆膜的检查,包括检查漆膜的外观:平整光滑,无流挂、针孔、气泡、漏涂等弊病;膜厚应达到设计要求,遵循所选测点必须有85%以上测点膜厚大于规定膜厚,且最低膜厚不应低于规定膜厚的85%;附着力的检测:涂层应进行拉开法附着力的检测,所有测点的附着力应高于5mpa,如表3。
[0112][0113]
表3:不同温度下干燥情况
[0114]
通过反复试验,确定了聚氨酯防腐防护涂料的涂装工艺方案,具体如下:
[0115]
(1)塔筒用适当的清洁剂去除油脂等污染物。用高压淡水清洗盐迹和其它污物,然后喷砂至sa2.5级。
[0116]
(2)将涂料混合,严格控制质量比及混合程度,确保底部沉积的填料等均匀分散在涂料中,可适量加稀释剂。控制混料时间,确保涂装在涂料的适用期内完成。
[0117]
(3)底漆涂装
[0118]
在清洁干燥表面涂装混合均匀的底漆,因底漆的固含量较高,较为粘稠,往往用辊涂或刮涂方法施工。一般分3次涂装,间隔时间以表干(指触干)时间为参考(具体时间按照产品说明书实施),不超过2小时为宜,实际涂装次数以达到所需干膜厚度(100-200微米)为准。
[0119]
施工过程中,两次涂装的间隔时间应随环境温度的高低而调整,温度越高,间隔时间越短。若环境温度偏低,可用红外加热设备辅助加热。间隔时间若超过重涂时间,为保证漆膜的层间结合,应将固化漆膜表面进行拉毛处理,并保持表面没有颗粒物残留。
[0120]
阴雨天不宜施工,以免湿气残留于漆膜中。
[0121]
(4)中间漆涂装
[0122]
中间漆的涂装工艺要求与底漆相同,施工条件和间隔时间按要求实施。
[0123]
(5)面漆涂装
[0124]
面漆的固含量相对较低,一般在50-60%之间,可喷涂或辊涂,表干时间不超过4小时。可在规定间隔时间内多次涂装,达到所需干膜厚度(100微米以内)。
[0125]
本在役风电塔筒外壁防护层现场自动再制方法,通过对塔筒结构表面不同区域的结构的不同处理过程,结合利用专用塔筒爬壁机器人进行作业,具有高效、安全的作业过程,且作业过程可视化,施工工艺更加标准规范,且涂膜平滑,有效降低风阻;具有优异的实
际应用效果,一次喷涂即可得到高厚膜,适合大面积喷涂,干燥速度快,施工周期短,生产效率高。一般维护时间为投入运行后十年左右。
[0126]
本机器人的施工条件:打磨作业风力小于4级。喷漆作业最好选择无风条件下进行。雨雾天气不适合作业。露水及冷凝水都会对摩擦力影响较大。不能作业。施工队伍准备不低于3人。1人操作遥控机器人,1人塔顶防护,1人辅助调油漆等工作。
[0127]
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
