1.本发明具体涉及一种用于喷涂流水线的自动点射喷涂控制系统。
背景技术:
2.目前在各行各业的生产过程中,不管是工艺性、防腐性或装饰性的需求,普遍的按需在产品外表面喷涂各种性质的涂料,喷涂工艺都是一项主要的生产工艺过程。现有较为普遍的喷涂方法主要有两种,一种为比较原始的人工手工喷涂,效率较低只适用于小批量的产品生产;另一种为采用自动流水线喷涂,效率较高适用于大批量的产品生产。但这种所谓的自动流水线喷涂,其实也只是一种调试好各把喷枪的位置和喷枪参数后,将喷涂的涂料从喷枪中连续的喷出,将需要喷涂的产品固定在输送流水线上,当输送流水线上的产品从喷枪前经过时,被喷涂上一层适当厚度的涂料而已。它只是代替了由人一手拿着喷枪,一手拿着产品进行喷涂的生产方式。由于自动喷涂流水线在喷涂时,涂料是从喷枪中连续喷出的,显而易见,不管前面有没有产品经过,它都是无差别的喷出涂料。同时在产品的形体出现不同时,由于输送流水线上用于固定产品的位置间距是固定的,那么产品的喷涂面越窄,在两个被喷涂的产品之间的空隙就越大,从而在没有产品经过或在产品的空隙之间,就喷出了大量的无用涂料,造成了涂料的大量浪费,同时也加剧了为处理这些被浪费的涂料而产生的环保处理费用。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种用于喷涂流水线的自动点射喷涂控制系统。
4.为实现上述目的,本发明提供了如下技术方案:一种用于喷涂流水线的自动点射喷涂控制系统,其包括:速度感知编码传感器,与喷涂流水线的电机配合设置,用于获取喷涂流水线的流水线运行速度;光电扫描模组,相对设置在喷涂流水线的两侧,用于实时获取当前位置的待喷涂产品的形状;测距模块,用于获取光电扫描模组的中心位置至喷涂执行机构的距离;工控机,其包括根据光电扫描模组获取的形状对待喷涂产品进行三维建模的建模模块、用于获取起喷时间及停喷时间的喷涂时间规划模块及用于存储规划后的喷涂参数的存储模块;喷涂执行机构,与工控机连接,并根据工控机发送的喷涂参数,实时控制喷枪工作,其中喷涂时间规划模块包括;起喷时间设定单元,根据测距模块及速度感知编码传感器获取的数据,获取起喷时间;
停喷时间设定单元,依据建模模块构建的三维建模结合速度感知编码传感器检测的流水线运行速度,得到喷涂时间控制参数。
5.所述喷涂执行机构并排设有多个喷枪,且各个喷枪的角度不同。
6.所述建模模块包括根据不同角度的喷枪划分不同喷涂区域的区域划分单元。
7.所述建模模块在完成三维建模之后,根据设定的喷枪的喷涂区域,将所述三维建模划分成相应的喷涂区域,并分别获取各个喷涂区域的长度。
8.所述喷涂时间规划模块为多个,分别对应不同位置的喷枪设置及对应的不同喷涂区域。
9.起喷时间设定单元通过测距模块获取的距离并结合喷枪的位置的补偿距离,通过速度感知编码传感器获取的喷涂流水线的速度,得到各个喷枪的起喷时间。
10.停喷时间设定单元通过获取各个喷涂区域的长度并结合速度感知编码传感器获取的喷涂流水线的速度,得到各个喷枪的喷涂时间控制参数。
11.停喷时间设定单元通过获取各个喷涂区域的长度并结合速度感知编码传感器获取的喷涂流水线的速度,得到各个喷枪的喷涂时间控制参数。
12.其还设有人机交互触摸屏。
13.所述工控机还设有输出驱动放大模块单元。
14.本发明的有益效果:可以大量的节省各种喷涂涂料,同时大大的减轻环保处理负担,以期达到大量降低生产成本,极大减轻污染排放的目的。可以方便轻松的根据需要,输出产品各生产阶段的产品种类、生产数量等各种所需统计数据,为后续的数字化生产管理工作奠定了基础。
附图说明
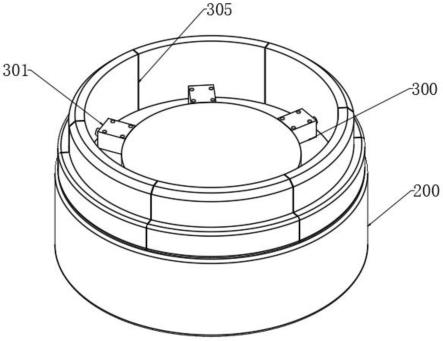
15.图1为喷涂执行机构处的结构示意图。
16.图2为速度感知编码传感器处的结构示意图。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
19.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
20.如图所示,一种用于喷涂流水线的自动点射喷涂控制系统,其包括:
速度感知编码传感器2,与喷涂流水线的电机配合设置,其设置在喷涂流水线的驱动电机的一侧,并通过同步带与其构成联动配合,可以用于实时获取喷涂流水线的流水线运行速度;光电扫描模组1,相对设置在喷涂流水线的两侧,一般位于喷涂执行机构的前侧,用于实时获取当前位置的待喷涂产品的形状,在待喷涂产品经由喷涂流水线经过该光电扫描模组时,直接通过扫描待喷涂产品的轮廓以获得其形状;测距模块3,用于获取光电扫描模组的中心位置至喷涂执行机构的距离,其采用精密激光测距模块,其一侧一般被装设于光电扫描模组的中心位置,其另一侧则设置喷涂执行机构的前端,被用于获取当前被光电扫描模组获取形状的待喷涂产品与喷涂执行机构之间的距离;工控机,其包括根据光电扫描模组获取的形状对待喷涂产品进行三维建模的建模模块、用于获取起喷时间及停喷时间的喷涂时间规划模块及用于存储规划后的喷涂参数的存储模块;其中建模模块则根据光电扫描模组获取的形状,实现三位模型的构建,并且在其构建完成的同时,根据设定的喷枪的喷涂区域对该三维模型进行喷涂区域规划,且每一个划分好的喷涂区域均对应一个喷枪设置。
21.喷涂执行机构4,与工控机连接,并根据工控机发送的喷涂参数,实时控制喷枪工作,其上并排设有多个喷枪,且各个喷枪的角度不同,且各个喷枪喷涂的区域不同,共同协作完成待喷涂产品的喷涂动作,而且每一个喷枪之间的距离相同,便于后续喷涂时间规划时的喷枪位置补偿。
22.其中喷涂时间规划模块包括;起喷时间设定单元,根据测距模块及速度感知编码传感器获取的数据,获取起喷时间;若为多个喷枪时,则需要增加喷枪的位置补偿距离,即利用测距模块检测的距离数据加上喷枪的位置距离,进而结合速度,得出喷枪的起喷时间,便于对各个喷枪根据待喷涂产品的移动到位才进行喷涂,节约涂料。
23.停喷时间设定单元,依据建模模块构建的三维建模结合速度感知编码传感器检测的流水线运行速度,得到喷涂时间控制参数。若为多个喷枪时,则需要针对不同的喷涂区域,获取对应喷涂区域的产品的尺寸,并依据该尺寸结合流水线速度,来获取喷涂时间控制参数,结合起喷时间,就能得到各个喷枪的停喷时间,进而实现喷枪精确喷涂待喷涂产品,若相邻的待喷涂产品之间具有空隙,则会针对该间隙,自动暂停喷枪的工作,实现涂料的精确喷涂。
24.而通过设置存储模块,可以将还未到达喷涂执行机构所在位置的待喷涂产品的相关喷涂参数存储在该存储模块中,实时跟踪每个产品的位置,按顺序的根据每个产品的流动位置,送出于该产品对应的各把喷枪的工作时间,命令喷枪适时的开启或关闭,以达到精准的喷涂控制的目的。
25.喷涂执行机构主要由电控阀、电控喷枪和安装电控喷枪的枪架等组成,负责接受输出驱动放大模块单元的控制信号,及时的开启或关闭喷枪的喷涂工作。
26.固定和手持式人机交互触摸屏主要是实时显示控制器的工作状态,输入微电脑工作所需的初始数据,进行初始的工作调试之用等。
27.实施例不应视为对本发明的限制,但任何基于本发明的精神所作的改进,都应在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。