技术特征:
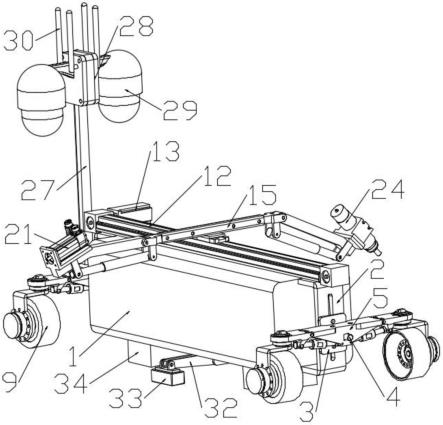
1.一种在役风电塔筒外壁防护层现场自动再制造系统,包括塔筒爬壁机器人与控制线,其特征在于,所述塔筒爬壁机器人包括箱式结构的机器人本体,所述机器人本体的底部设有电磁装置,所述机器人本体的顶部设有能够沿机器人本体前后方向移动的作业平台,所述作业平台上设有电磨装置和喷涂装置,所述机器人本体的前后两个端面上设有行走装置,所述机器人本体的前端位置处设有视觉装置;所述机器人本体的前后两个端面上设有稳定板,两个所述行走装置分别安装在稳定板上,所述行走装置包括前桥固定架,所述前桥固定架上通过栓轴安装有前桥板,所述前桥板的对称两侧的端部设有可内向调节的驱动轮组件,相对的驱动轮组件能够相对翻转呈环抱状。2.如权利要求1所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述稳定板为匚字形结构,所述稳定板的端面上纵向设置条形孔,所述前桥固定架通过调节螺栓固定在条形孔内,所述前桥板为倒置的等腰三角型结构,所述栓轴连接在所述前桥板的几何中心点处,所述驱动轮组件包括通过铰链连接前桥加紧支座,驱动轮通过驱动电机轮支架固定在前桥加紧支座上,所述前桥加紧支座与前桥板之间通过前桥夹紧气缸连接,所述驱动电机轮支架为角铁结构,其中一个板结构与前桥加紧支座通过摆动电机连接,另一个板结构固定在轮轴上,所述轮轴的内向延长端上设置驱动轮。3.如权利要求2所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述作业平台包括固定在所述机器人本体上的滑轨,所述滑轨的一端设有直线电机,所述滑轨上设有能够沿滑轨的轨道滑动的滑台,所述滑台上设有与滑轨的轨道水平方向垂直的伸缩定位套,所述伸缩定位套的两端分别通过俯仰调节装置连接电磨装置和喷涂装置。4.如权利要求1所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述俯仰调节装置包括设置在伸缩定位套内部并具有t型连接结构的伸缩杆,所述伸缩杆的水平端连接安装支架,所述安装支架的端部设有电磨装置或喷涂装置,所述伸缩杆的垂直端通过调节气缸连接安装支架的相对侧的端部。5.如权利要求4所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述安装支架的活动端具有向调节气缸一侧弯曲的曲柄结构,所述电磨装置或喷涂装置设置在曲柄结构上侧,所述调节气缸连接曲柄结构的内侧。6.如权利要求5所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述电磨装置包括固定安装在曲柄结构上的电磨安装支架,所述电磨安装支架内设置电磨驱动电机,所述喷涂装置包括固定安装在曲柄结构上的喷枪安装支架,所述喷枪安装支架上设有喷枪固定夹,所述喷枪固定夹夹持有喷枪。7.如权利要求6所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述电磨安装支架与喷枪安装支架均包括位于曲柄结构上侧的板件,所述板件的底部设有向下延伸且位于曲柄结构两侧的辅支撑件,所述调节气缸连接在辅支撑件上。8.如权利要求7所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述视觉装置设置在稳定板上,所述视觉装置包括摄像头安装支架,所述摄像头安装支架的顶部设有控制盒,所述控制盒的对称两侧设有摄像头,所述控制盒上设有通讯天线。9.如权利要求1所述的在役风电塔筒外壁防护层现场自动再制造系统,其特征在于,所述电磁装置包括固定安装在机器人本体底部的电磁铁固定支架,所述电磁铁固定支架的对
称两侧设有通过调节轴连接的电磁铁夹紧臂,所述电磁铁夹紧臂的端部设有电磁铁,所述机器人本体底部还设有磁体。10.一种在役风电塔筒外壁防护层现场自动再制方法,包括如权利要求1-9任一项所述的塔筒爬壁机器人,其特征在于,具体包括如下步骤a.确定套筒表面状态:通过操作专有的塔筒爬壁机器人,对塔筒表面检测、扫描,并形成塔筒表面图谱;b.根据塔筒表面的程度确定对不同区域进行相应的标记,标记依据套筒表面的磨损程度、腐蚀程度、风化程度以及裂痕状态;c.操作塔筒爬壁机器人根据首次扫描路径以及图谱信息,对标记区域逐个进行打磨、喷涂作业;所述步骤a中,通过塔筒爬壁机器人对塔筒外壁的扫描过程包括,将塔筒纵向划分为3个条形区域,以塔筒爬壁机器人所在中线为准,向两侧展开形成扇形扫描区域,将三个扫描区域通过图像拼接软件拼接后,形成塔筒平面图;步骤b中,根据已近设定的标记状态,通过不同的颜色将不同程度的塔筒表面进行标记,确定修复难度其中修复难度由高到低为磨损程度、腐蚀程度、风化程度以及裂痕状态,修复过程为由低到高进行处理;步骤c中的打磨、喷涂作业的先后顺序为先进行打磨,后喷涂,喷涂作业的涂装由底漆、中间漆和面漆三道涂装工序组成。
技术总结
本发明实施例公开了一种在役风电塔筒外壁防护层现场自动再制造系统与方法,其包括塔筒爬壁机器人与控制线,塔筒爬壁机器人包括箱式结构的机器人本体,机器人本体的底部设有电磁装置,机器人本体的顶部设有能够沿机器人本体前后方向移动的作业平台,作业平台上设有电磨装置和喷涂装置,机器人本体的前后两个端面上设有行走装置,机器人本体的前端位置处设有视觉装置,实施作业的塔筒爬壁机器人设计为通过磁力吸附方式,实现在风电塔身外壁上的吸附功能;利用驱动轮进行转向,实现竖向和横向运动,实现对塔筒外壁进行打磨和喷漆运动作业,作业高效、稳定,保障风电塔本身的安全运行;该方法具有高效、安全的作业过程,施工工艺更加标准规范。标准规范。标准规范。
技术研发人员:李太江 李巍 李聚涛 李生文 魏伟 娄正计 孙琦
受保护的技术使用者:西安热工研究院有限公司
技术研发日:2022.04.25
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。