1.本发明涉及一种基于复合异型翼缘轨道的高速巴士公交系统,属于交通技术领域。
背景技术:
2.随着经济的高质量发展和人们对生活、交通、城市治理、环保低碳高端需求,对城市交通提出了越来越高的要求。。轻轨、跨坐式单轨、悬挂式空轨交通一条线路上只有一种交通模式,城市低空资源没有得到充分利用,实际平均运营速度20~40公里/小时,为实现大运量,每节车均以100~320人大容量、站立人员60%以上,单车大容量拥挤、低运营速度、每站必停、单一轨道、单一客运功能的公交运营模式,使现代智慧城市的市民缺乏高速高效、舒适高端公共交通出行幸福感的体验,所以自驾车出行仍然占有相当大的比例,因此城市地面交通拥堵、空气污染、碳排放高、停车难、急增的物流快递车又添新堵等问题还没有得到有效的解决。
技术实现要素:
3.本发明的目的在于:针对上述存在的问题和不足,提供一种基于复合异型翼缘轨道的高速巴士公交系统,尤其是一种基于h结构基梁(1)上下复合异型翼缘轨道的高速巴士公交系统与高速物流系统共享轨道运行,交通高峰时上下复合轨道同时运行高速公交,地面公交 1小时的路程上下复合轨道公交仅需10分钟,为市民提供一种全座席、高速高效、环保低碳、舒适高端的出行;非交通高峰时物流车与公交车共享轨道,充分利用城市低空资源实现效益最大化。本发明提供的是其中一种基于复合异型翼缘轨道的高速巴士公交系统解决方案。
4.发明概述
5.本发明涉及一种基于复合异型翼缘轨道的高速巴士公交系统,尤其是一种基于h结构基梁(1)上下复合异型翼缘轨道的高速巴士公交系统,包括复合异型翼缘轨道系统、高速巴士公交车、运行中央云平台,复合异型翼缘轨道系统架设在地面墩柱(15)上或山体隧道内、或地下隧道内沿规划路线延伸,高速巴士公交车在运行中央云平台指挥和管理下在复合异型翼缘轨道上方运行,其下方轨道运行下翼缘异型磁浮轨道车(2v)。所述规划路线是城市道路两侧或路中心的绿化带上、或高速路的边坡或中分带上、或山体隧道内、或地下隧道内等。本发明复合异型翼缘轨道的高速巴士公交系统,最小转弯半径20米、爬坡能力达到100
‰
,速度为120~160公里/小时,是轻轨的2~3倍,工造价是轻轨的1/3~1/2,线路适应能力强、占地少、拆迁少、极少占用路权、综合造价低;交通高峰时,上下复合轨道同时运行高速客运车,实现公交车1小时路程复合异型翼缘轨道高速巴士只需10分钟,上下轨道每小时单向最大运量可达43200~57600人,提供全座席、高速高效、平稳舒适、节能环保的城市高端出行体验;非交通高峰客运和物流车同轨交替运行,实现城市交通资源效益最大化。
6.发明详述
7.本发明提供一种转向架,包括承载基架(6g)和安全导向架(5a),安全导向架(5a) 安装在承载基架(6g)下方。所述承载基架(6g)包括边纵梁(6h)、边横梁(6j)、横梁 (6l),在同一水平面上纵向平行整齐排列的两边纵梁(6h)的端部与两边横梁(6j)的端部垂直连接成矩形框架结构;0~3支或更多支中纵梁(6k)在矩形框架结构内平行于边纵梁(6h)等间距或不等间距垂直安装在边横梁(6j)上;2~5支或更多支横梁(6l)在矩形框架结构内平行于边横梁(6j)等间距或不等间距垂直平面交叉安装在边纵梁(6h)和中纵梁(6k)上,组成承载基架(6g)。
8.所述安全导向架(5a)包括u型安全导向柱、纵向安全柱(5c);u型安全导向柱为u 矩形柱体结构,由u型柱腿(5b)、u型底边(5e)和u型中柱(5f)组成;左右u型柱腿(5b)相互平行,u型柱腿(5b)和u型底边(5e)垂直连接成一个整体;u型中柱(5f) 安装于左右u型柱腿(5b)的中部,且平行于u型底边(5e);前后各一支u型安全导向柱竖直镜像对称地设置在承载基架(6g)前后端下方,其u型柱腿(5b)顶端分别安装在前后边横梁(6j)的外侧面上;左右各一支纵向安全柱(5c)分别安装在前后两u型底边 (5e)两端内侧;0~3支或更多支中支撑柱(5d)的底端连接在纵向安全柱(5c)上,其顶端安装在横梁(6l)上或边纵梁(6h)上或其它适宜位置;优选的,所述u型安全导向柱可以独立使用;如图3所示。
9.优选的,所述转向架还包括驾驶室(6a)、设备室(6b)、自备电池仓(6c),驾驶室(6a)、设备室(6b)、自备电池仓(6c)分别安装在承载基架(6g)底面的前部、中部和后部位置,本领域技术人员可以根据需要进行位置的调整;一般情况下,驾驶室(6a)用于安装无人智能驾驶系统、制动控制系统、电机操作机构、智能辅助导向控制系统等;设备室(6b)用于安装车辆管理系统、车门控制系统、车物联网系统、卫星定位系统等;自备电池仓(6c) 用于安装自备电池、逆变器和电池管理系统等;本领域技术人员也可以根据需要对驾驶室 (6a)、设备室(6b)、自备电池仓(6c)所安装的设备进行调整。所述转向架还包括牵引杆(6e),牵引杆(6e)前后各一个,分别安装在承载基架(6g)前后端边横梁(6j)外表面,牵引杆(6e)分别用于与前后车辆的连接,根据需要以实现2~15车或更多车的组列效率运行;如图6、图7所示。
10.本发明提供一种安全导向单元,所述安全导向单元包括安全导向轮(51)、伸缩杆(52)、伺服电动缸(53),安全导向轮(51)、伸缩杆(52)、伺服电动缸(53)依次安装成一个整体结构。左右各一套安全导向单元,其安全导向轮(51)朝外、伺服电动缸(53)朝内、镜像对称地安装在一起,组成一个安全导向组对。
11.本发明提供一种安全导向机构(50),包括安全导向组对,安全导向组对安装在安全导向架(5a)的u型安全导向柱上。安全导向机构(50)包括双区安全导向机构和单区安全导向机构。
12.一安全导向组对安装在u型安全导向柱的u型中柱(5f)上,其左右两端的安全导向轮(51)对应轨道系统的上智能安全导向轮轨迹(35);另一安全导向组对安装在u型柱底边(5e)上,其左右两侧的安全导向轮(51)对应轨道系统的下智能安全导向轮轨迹(36),所述轨道系统的上智能安全导向轮轨迹(35)和下智能安全导向轮轨迹(36),分别位于轨道系统的上下两个不同区域,称为双区安全导向机构。如图4a、图4b、图4c、图4d所示。
13.优选的,所述安全导向机构(50)可以设置在对应轨道系统的同一个区域,对应轨道系统的上智能安全导向轮轨迹(35)和/或下智能安全导向轮轨迹(36)也设置在轨道系统
的同一区域,所述定位信号网(4f)同时也设置在轨道系统的同一区域,与车辆上的定位测速器(4g)的安装位置相对应。例如:一个安全导向组对安装在u型安全导向柱上,其左右两端的安全导向轮(51)对应轨道系统的上智能安全导向轮轨迹(35)或下智能安全导向轮轨迹(36),称为单区安全导向机构;两个或两个以上的安全导向组对呈上下镜像对称地并列安装在一起,共同安装在u型安全导向柱上,其左右两端的安全导向轮(51)对应轨道系统上设置在同一个区域的上智能安全导向轮轨迹(35)和/或下智能安全导向轮轨迹(36),亦称为单区安全导向机构。
14.本发明提供一种智能安全导向系统(5)包括安全导向部件和智能安全导向控制系统;安全导向部件由智能安全导向控制系统进行智能控制,所述安全导向部件选自安全导向单元、安全导向组对或安全导向机构(50)。
15.优选的,安全导向单元一端的安全导向轮(51)对应轨道系统上的上智能安全导向轮轨迹(35)或下智能安全导向轮轨迹(36),安全导向单元的另一端可以安装在转向架上任何合适的位置,包括安全导向架(5a)上,或以其组合形式的安全导向组对或安全导向机构(50)安装在转向架上合适的位置,安全导向单元的安装位置和数量、或安全导向组对或安全导向机构(50)的安装位置,由本专业技术人员具体设计;安全导向单元由智能安全导向控制系统进行智能控制;智能安全导向系统(5)突出特征是由智能安全导向控制系统根据车辆运行状态、或侧向风力大小、或转弯离心力大小、或车辆运行偏移量大小,智能调整安全导向轮与轨道系统上轨迹之间的距离保持0~30mm或更宽的距离,精准控制辅助导向力的大小和平衡稳定力的大小,精准辅助安全运行,最大限度减少无人驾驶车的运行阻力。如图1、图5、图6、图7所示。
16.本发明提供一种基于复合异型翼缘轨道的高速巴士公交系统,其特征在于,基于h结构基梁(1)复合异型翼缘轨道的高速巴士公交系统,由高速巴士公交车、复合异型翼缘轨道系统、运行中央云平台组成,复合异型翼缘轨道系统架设在地面墩柱(15)上或山体隧道内、或地下隧道内沿规划路线延伸;在运行中央云平台的指挥控制和管理下,高速巴士公交车在无人智能驾驶系统驾驶下,沿着复合异型翼缘轨道系统高速安全准时运行。
17.所述高速巴士公交车包括转向架、智能安全导向系统、行走机构、动力系统、安全运行系统、客车箱;智能安全导向系统(5)、行走机构、动力系统、安全运行系统安装在转向架下方或转向架与客车厢之间或部分在客车厢内,客车厢安装在转向架的上方。优选的,所述高速巴士公交车还包括车辆管理系统、无人智能驾驶系统、车物联网系统,车辆管理系统、无人智能驾驶系统、车物联网系统安装在车箱内或其它合适的位置。
18.所述行走机构(6)安装在转向架的承载基架(6g)下方,包括转向行走机构和支撑行走机构;转向行走机构包括转向轮(61)、转向轴(62)、转向机构(65)、减振悬挂机构(66),转向轴(62)两端由内及外依次安装有转向机构(65)和转向轮(61),转向机构(65)安装在转向轮(61)上,无人智能驾驶系统通过转向机构(65)控制转向轮(61)实现自主导向,转向轴(62)通过减振悬挂机构(66)安装在承载基架(6g)下方的前部;支撑行走机构包括支撑轴(63)、支撑轮(64),支撑轴(63)的两端各安装有1~2支撑轮(64),支撑轴(63)通过减振悬挂机构(66)安装在承载基架(6g)下方的后部。如图6、图7所示。
19.所述动力系统包括永磁同步电机(67)、平行传动变速箱(68)、电机控制器(69);电机控制器(69)安装在永磁同步电机(67)的外壳上,永磁同步电机(67)的动力轴与平行传动
变速箱(68)的动力输入端相连使永磁同步电机(67)和平行传动变速箱(68)组合为动力系统的整体结构,平行传动变速箱(68)的动力输出端即成为动力系统的动力输出端;一套动力系统上部安装在承载基架(6g)下方、下部安装在行走机构的转向轴(62)上,动力系统的动力输出端与转向轴(62)相连,以驱动转向轮(61)运行;另一套动力系统上部安装在承载基架(6g)下方、下部安装在支撑轴(63)上,动力系统的动力输出端与支撑轴(63)相连,以驱动动力轮(64)运行;如图6b、图7b所示。
20.所述动力系统还包括自备电池系统和供电系统。所述自备电池系统包括自备电池和电池管理系统,自备电池和电池管理系统均安装在自备电池仓(6c)内,自备电池仓(6c)自带充电系统,当外供电源突然停电后,在电池管理系统控制下,自备电池自动向全车供电,自备电池的储电量足够使车辆能安全到达前方二个车站中的一个。所述供电系统包括受电机构(4)和上供电轨(41);上供电轨(41)安装在轨道系统的上翼缘(3)外侧或其它适宜的位置,受电机构(4)一端安装在承载基架(6g)上,另一端与上供电轨(41)保持紧密接触保持正常供电,为在轨道系统上运行的车辆供电。如图1、图5、图6、图7所示。
21.优选的,所述动力系统的永磁同步电机(67)可由直线电机替代,所述直线电机是长次级短初级结构,包括直线电机次级(4d)、直线电机初级(4e)、逆变器;一条直线电机次级(4d)安装在轨道系统的结构端梁(10)和结构中梁(11)的上表面;一只直线电机初级 (4e)安装在转向架底部的u型柱底边(5e)上,与直线电机次级(4d)位置相对应,逆变器安装在自备电池仓(6c)内,为直线电机初级(4e)供电。如图6a、图7a所示。
22.优选的,所述动力系统可由氢动力系统替代,氢动力系统包括动力电池、储氢仓、氢电池堆、氢电池升压器和动力控制单元;动力电池安装在自备电池仓(6c)内或车辆上其它适宜的位置,动力电池用于加速时辅助氢电池堆供电,动力控制单元设在自备电池仓(6c)内或车辆上其它适宜的位置,用于控制动力电池的充放电;储氢仓设置于设备室(6b)内或车辆上其它适宜的位置;氢电池堆和氢电池升压器安装在自备电池仓(6c)内或车辆上其它适宜的位置,氢电池升压器将氢电池堆的电能升压后供给永磁同步电机(67);动力电池可替代自备电池。
23.安全运行系统包括制动发电机构、制动控制系统、图像雷达识别测距装置(6d)、位置信号测速器(4g);制动发电机构安装在转向轮(61)和支撑轮(64)上,制动发电机构在制动控制系统的控制下,根据无人智能驾驶系统的指令实施制动、保持或解除操作,制动控制系统安装在设备室(6b)内或车辆上其它适宜的位置,制动发电机构在车辆制动时发出的电能送往自备电池或动力电池;图像雷达识别测距装置(6d)前后各一对,分别安装在前后边横梁(6j)外侧面上,是自动驾驶识别前后车距离、速度,以及运行前方侵入运行安全区域的障碍物眼睛,确保行车安全;位置信号测速器(4g)安装在转向架的外侧,与轨道系统上的定位信号网(4f)相对应,为车辆的安全运行提供准确的位置信息。如图5、图6、图7所示。
24.所述客车箱,包括矩形立体结构的客车箱体(7),其前后端壁上安装有前后窗(71);左右两侧壁上均安装有侧面窗(72),一侧壁上安装车门,所述车门由自动滑动门(73)、车门滑道(74)组成,车门滑道(74)安装在自动滑动门(73)上下边缘对应的客车箱体(7) 的外侧壁上,自动滑动门(73)沿车门滑道(74)在车门控制系统的控制下自动打开或关闭,车门控制系统把车门的状态信息实时传给车辆管理系统,车门控制系统安装在设备室(6b) 内;客车箱体(7)的底部是客车底架(77),是客车箱内乘客全部重量的支撑和安全保
障构架,客车底架的上表面安装有1~12排座椅(76)或更多排座椅,每排座椅(76)设3~4 个座席或更多个座席,根据需要进行设计;空调(75)安装在客车箱的顶部,为客车箱夏天提供冷空气、冬天为客车箱提供热风,为乘客提供高端舒适的乘座环境;客车箱体(7)通过客车底架安装在承载基架(6g)上。所述客车箱体(7)是由铝合金材料制造而成、或由复合纤维材料制造而成;如图1、图5、图8、图9所示。
25.优选的,所述客车箱还包括视频监控识别系统、广播提醒系统,视频监控识别系统安装在客车箱内顶部的前后端各一个,用于对客车箱乘客的状况、空座状况进行识别;广播提醒系统安装在客车箱内顶部的前端,自动播报车到达车站的情况以及其它事项的提醒。
26.所述车辆管理系统设置在设备室(6b)内或车辆上其它适宜的位置,对无人智能驾驶系统、电机控制系统、制动控制系统、车门控制系统、电池管理系统、安全运行系统、制动机构及车辆各机构的运行状态进行监测、系统管控,并与车物联网系统和卫星定位系统进行数据信息交换,对高速巴士公交车的运行状态以及车辆各机构的状态进行检测控制和管理。若本列车内乘客已满座,车辆管理系统通过车物联网系统把该辆车将启动直达运行的信息发送给运行中央云平台和最近目的地车站,车辆管理系统对无人智能驾驶系统下达直达运行指令和最近目的地车站信息。
27.所述无人智能驾驶系统设置在自动驾驶室(6a)内或车辆上其它适宜的位置,是高速巴士公交车运行控制的大脑,主要包括无人驾驶信息系统、无人驾驶操作系统;把来自图像雷达识别测距装置(6d)、卫星定位系统、车辆管理系统的信息指令、轨道通号系统、复合异型翼缘轨道系统、车门控制系统、电池管理系统、电机控制系统、制动控制系统等系统的信息、以及运行中央云平台的指令信息等融合为运行控制数据,由无人驾驶系统进行数据计算、处理分析、并形成驾驶操作指令,操作电机操作机构、制动控制系统、智能辅助导向控制系统等,来驾驶高速巴士公交车安全运行。具体由本领域技术人员进行专业设计和制造。
28.所述车物联网系统安装在设备室(6b)内或车辆上其它合适的位置,是高速巴士公交车对外通讯的核心系统,对外通过轨道系统上的通讯基站(1f)与运行中央云平台、前后高速巴士公交车的进行通讯和数据信息交换,对内与车辆管理系统信息数据互通。车物联网系统将把车的设备状态、实时位置、运行速度等实时发送给运行中央云平台和前后各3-5辆车的车物联网系统,以实现前后各3~5辆车安全协同运行。
29.本发明提供一种基于复合异型翼缘轨道的高速巴士公交系统,其特征在于,基于h结构基梁(1)复合异型翼缘轨道的高速巴士公交系统,包括复合异型翼缘轨道系统、高速巴士公交车、运行中央云平台,复合异型翼缘轨道系统架设在地面墩柱(15)上或山体隧道内、或地下隧道内沿规划路线延伸;在运行中央云平台的指挥控制和管理下,高速巴士公交车在无人智能驾驶系统驾驶下,沿着复合异型翼缘轨道系统高速安全运行。
30.本发明提供一种复合异型翼缘轨道系统,其特征在于以h结构基梁(1)为基础,其上翼缘设有的上翼缘异型l轨道(30)与下翼缘设有下翼缘异型磁浮轨道(20)上下复合组成一种复合异型翼缘轨道系统,包括h结构基梁(1)、上翼缘异型l轨道(30)、下翼缘异型磁浮轨道(20)、安装横梁(12)、连接中梁(13)、墩柱(15)和新能源系统(1h)。在同一水平面上左右镜像对称纵向平行布置的两榀h结构基梁(1),在其相对应内侧面的前后两端各设有一个安装横梁(12)、在前后安装横梁(12)之间纵向均匀分布设有0~20个或更多个矩形空心结构的连接中梁(13),把左右h结构基梁(1)连结成一榀轨道梁;多榀h 结构基复合异型翼缘
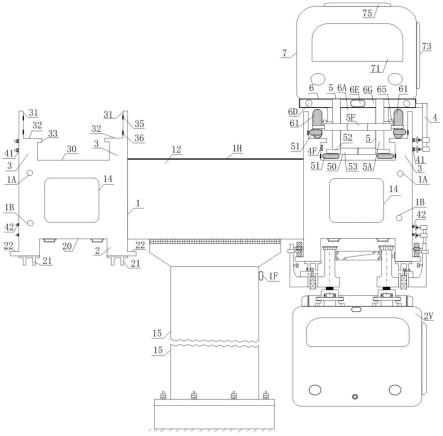
轨道梁的前后安装横梁(12)分别连续架设在墩柱上,墩柱每间隔5~ 120米一根安装在规划路线的地面上连续延伸;所述地面优选道路两侧的绿化带、或道路中心绿化带、或高速路中分带、或高速路两侧的边坡;新能源系统(1h)架设在安装横梁(12)、连接中梁(13)的上表面及左右h结构基梁(1)的侧面上,并与h结构基梁(1)侧面之间留有除雪和雨水分流缝隙,所述新能源系统(1h)(例如光伏发电)为轨道照明系统、通讯系统或动力系统提供辅助清洁能源。如图1和图2所示。
31.所述h结构基梁(1),包括竖直翼缘梁、结构端梁(10)。在同一水平面上左右各一支竖直翼缘梁纵向平行镜像对称布置,在两竖直翼缘梁的两端相对应内侧面上各设一个结构端梁(10),两个结构端梁(10)之间纵向均匀分布设有0~20个或更多个的结构中梁(11),结构端梁(10)和结构中梁(11)上表面和下表面分别在两个平行平面上,把左右的竖直翼缘梁在其中部区域连接为一个整体,组成h结构基梁(1);所述结构端梁(10)和结构中梁(11)均设有一个或多个减重孔(14),所述竖直翼缘梁是空心结构或实心结构、竖直翼缘梁及其与结构端梁(10)和结构中梁(11)的连接处是空心结构或根据结构及强度需要选用实心结构,实现h结构基梁(1)结构的优化和轻量化;所述h结构基梁(1)、结构端梁 (10)和结构中梁(11)由钢筋混凝土整体浇铸而成、或由钢材加工而成、或由复合材料制造而成;优选的,所述h结构基梁(1)的上翼缘(3)和下翼缘(2)可以是对称矩形结构,其突出特征是非对称结构,上翼缘(3)优化减薄,实现轻量化。如图1、图2所示。
32.所述上翼缘异型l轨道(30),包括h结构基梁(1)和l结构轨道,以h结构基梁(1) 为基础,其左右两个上翼缘(3)的上表面各设有一条l结构轨道。所述l结构轨道包括l 竖边护板(31)和l水平边轨道面(32),l竖边护板(31)和l水平边轨道面(32)之间呈85-95度夹角,其l竖边护板(31)朝上、外侧面与上翼缘(3)的外侧面在同一竖直面上,其l水平边轨道面(32)向内水平安装在上翼缘(3)的上表面,上翼缘异型l轨道(30) 沿h结构基梁(1)纵向延伸;l水平边轨道面(32)向内侧超出上翼缘(3)宽度的部分称为l轨道面外展板(33);如图1、图2所示。
33.优选的,所述上翼缘异型l轨道(30)还包括上智能安全导向轮轨迹(35)、下智能安全导向轮轨迹(36)、上供电轨(41)。上智能安全导向轮轨迹(35)位于左右l竖边护板(31) 的内侧面,下智能安全导向轮轨迹(36)位于左右上翼缘(3)内侧面上;上供电轨(41) 安装在h结构基梁(1)的外侧或其它适宜安装的位置,为在翼缘异型l轨道(30)上运行的车辆供电,其电源由设在动力电缆孔(1a)内的动力电缆供给。优选的,所述上翼缘异型l轨道(30)由钢筋混凝土或采用纤维增强钢筋混凝土浇铸成一个整体结构,或用钢材制造而成、或采用复合材料制造而成。如图1、图2所示。
34.所述上翼缘异型l轨道(30)还包括轨道通号系统,轨道通号系统包括通讯电缆、定位信号网(4f)、卫星定位系统、通讯基站(1f)、上翼缘异型l轨道讯号系统。通讯电缆布置在通讯电缆孔(1b)内,以实现车辆、轨道、车站和运行中央云平台之间有线和无线通讯的双保险、以及信息的相互验证确认;定位信号网(4f)安装在上翼缘(3)内侧面上,与在轨道运行车辆上的位置信号测速器(4g)相对应安装,以实现无人智能驾驶车运行过程中的精准定位和到达车站后的精准定位停车;卫星定位系统安装在设备室(6b)内或其它适宜的位置,卫星定位信息与位置信号测速器(4g)交叉相互校对,以位置信号测速器(4g) 为主确保无人智能驾驶准确、快速、安全运行;通讯基站(1f)安装在墩柱上,包括5g或 6g等低延时高速度
的无线通讯设备,车辆的车物联网系统通过通讯基站(1f)与前后车辆、车站和运行中央云平台保持信息通讯。上翼缘异型l轨道讯号系统包括上翼缘异型l轨道状态信息、道叉状态信息、车站状态信息、乘客信息、车辆位置信息等车辆安全运行的重要信息,通过布置在通讯电缆孔(1b)内的通讯电缆传送到沿线每个车站控制系统和运行中央云平台、并通过通讯基站(1f)无线传送到高速巴士公交车,实现信息交叉确认,确保信息准确、安全。如图5、图6、图7所示。
35.优选的,所述上翼缘异型l轨道(30)可以做为独立轨道使用,所述h结构基梁(1) 由u型基梁(1g)替代,所述u型基梁(1g)包括竖直翼缘梁、结构端梁(10)、结构中梁(11),在同一水平面上左右各一支纵向平行布置的竖直翼缘梁,在两竖直翼缘梁相对内侧面的底部区域的两端各设一个结构端梁(10),沿两竖直翼缘梁内侧面的底部区域、两个结构端梁(10)之间均匀分布设置有0~20个或更多个的结构中梁(11),把左右的竖直翼缘梁连接为u型基梁(1g)的整体结构,其上部的翼缘称为上翼缘(3)。所述上翼缘异型 l轨道(30)设置在u型基梁(1g)的上翼缘(3)上,其余结构与上述上翼缘异型l轨道 (30)完全一致。如图10所示。
36.所述下翼缘异型磁浮轨道(20),包括h结构基梁(1)、u型钢轨道(21)、支撑轨道(22),以h结构基梁(1)为基础,其左右两个下翼缘(2)外侧或内侧各设置有一条支撑轨道(22),左右支撑轨道(22)在同一水平面上镜像对称设置;左右各一条u型钢轨道(21)安装在下翼缘(2)的底面上,左右u型钢轨道(21)在同一水平面上镜像对称设置;所述u型钢轨道(21)、支撑轨道(22)均沿着h结构基梁(1)的纵向连续延伸。所述u型钢轨道(21) 由钢热轧制而成或由钢板焊接而成。所述下翼缘异型磁浮轨道(20)还包括下供电轨(42),下供电轨(42)安装在下翼缘异型磁浮轨道(20)上,为在下翼缘异型磁浮轨道(20)上运行车辆供电,其电源由设在动力电缆孔(1a)内的动力电缆供给。优选的,所述h结构基梁(1)、下翼缘(2)、内悬挂轨道(21)均由钢筋混凝土或采用纤维增强钢筋混凝土浇铸成一个整体结构,或用钢材制造而成、或采用复合材料制造而成。如图1、图2所示。
37.所述运行中央云平台是高速公交车系统运行的大脑、信息数据存储和交换中心、信息数据计算处理中心、系统运行指挥管理中心,接收和处理每一辆高速巴士公交车物联网系统以及轨道系统、轨道通号系统、车站、供电系统等每个独立运行系统运行信息和设备状况信息。对临时出现的运行状况进行及时处理,立即调度并发出指令,以保证高速公交车系统安全和高效运行。
38.本发明提供一种基于复合异型翼缘轨道的高速巴士公交系统的运行方法:
39.1)高速巴士公交车为全座席高端舒适的公交车,每个车门有相对的两排舒适座椅,6~ 8个席位,在运行中央云平台、车辆管理系统等系统协同管理下,无人智能驾驶系统驾驶车辆由始发站在复合异型翼缘轨道系统上出发;始发站的车站管理系统把本站上车乘客数量、对应的车厢信息和乘客到达目的地车站的信息发送给车物联网系统,车物联网系统把信息由内部线路传送到车辆管理系统,车辆管理系统通过车内视频监控识别系统核对每一排乘客的数量和空位数,并与接收到的车站管理系统信息进行交叉核实;
40.2)在复合异型翼缘轨道系统上运行的高速巴士公交车的设备状态、实时位置、运行速度等通过车物联网系统实时发送给运行中央云平台和前后各3~5辆车的车物联网系统,以实现前后各3~5辆车安全协同运行。例如有一辆车因故需要紧急制动,后面的3~5辆
车将同步减速行驶,并依次传递给后面的车辆,实现安全协同运行;车内空位的数量和对应车门信息、乘客到达目的站的信息、车内乘客的状态(预防紧急情况)等由车辆管理系统由内部线路传送给车物联网系统,车物联网系统实时发送给运行中央云平台和前方的车站管理系统;
41.3)若本列车内乘客已满座,该辆车将启动直达最近目的地车站的运行模式,车辆管理系统通过车物联网系统把该辆车将直达运行的信息发送给运行中央云平台和最近目的地车站,车辆管理系统对无人智能驾驶系统下达直达运行指令和最近目的地车站信息,该辆车将以120~160公里/小时的速度直达最近目的地车站,为乘客提供了拥堵城市背景下的高速、高效、舒适、高端交通服务,地面自驾车拥堵1小时路程高速巴士公交车将10分钟到达;
42.4)高速巴士公交车到达前方的车站之前,车站管理系统已经将即将到站的该编组车每个车门的空座数量显示在车站对应的车门候车区,乘客打卡并按提示点中自己待到达目的地车站的名字后,乘客即可进入对应的车门候车区,实现乘客精准乘车;
43.5)高速巴士公交车到达车站后,乘客先下后上,刚刚下车的乘客逐一刷卡走出车门候车区。假若车内有1名乘客到达目的地车站后没有下车,刷卡走出车门候车区的乘客将少1 人,待上车的乘客将有1人仍然待在车门候车区无法上车,车站该车门候车区将自动用声音提醒乘客,请乘客耐心等待,下一班车将在1.5或2分钟后到达;
44.6)刚刚驶离车站的高速巴士公交车,若本列车内乘客已满座,将重复3)的操作;
45.7)运行中央云平台根据各车站客流量大数据计算和图象识别,对出现客流较大的车站采用空车直达的运行方式,快速疏解密集车站的客流,提高市民出行交通质量,提升城市运行效率,实现智慧城市智慧交通;
46.8)非交通高峰期,高速客运车将与高速物流车交替通行,实现交通资源效益最大化。
47.优选的,一种基于复合异型翼缘轨道的高速巴士公交系统,其特征在于还包括一种高速巴士中车,所述高速巴士中车是挂在高速巴士公交车后面,跟随高速巴士公交车共同运行;高速巴士中车包括转向架、智能安全导向系统、行走机构、动力系统、安全运行系统、客车箱等,与上述高速巴士公交车不同之处是缺少了无人智能驾驶系统和车物联网系统,其它构成与高速巴士公交车完全相同。高速巴士中车的启动、加速、制动、停车等运行操作、以及对外信息数据交换等操作命令全部都由其前面的或头尾的高速巴士公交车发出命令,高速巴士中车只是同步执行命令。高速巴士中车与高速巴士公交车之间的所有信息、执行指令的通讯均由内部通讯电缆来完成,确保信息传输无误。每辆高速巴士公交车后面可以挂1~15辆或更多辆高速巴士中车,本专业技术人员根据车站设计大小和需要进行设计。
48.以上编号仅为叙述的方便,不代表高速巴士公交系统的运行的实际顺序。可以将上述每个编号看做一个运行单元,根据实际需要调整运行单元的顺序和多少。本发明未详述部分均可采用现有技术。
49.本发明的优点是:
50.1、车辆舒适低碳环保。本发明高速巴士公交车全座席、人少(16~48人)、自重轻(车体采用铝镁合金和碳纤维等复合纤维制造)、高速度(120~160公里/小时),交通高峰上下复合轨道同时运行公交车、每列6~15节或更多节车运行,对拥堵车站空车直发,快速高
效疏解交通拥堵,上下复合轨道小时单向客运量达4-7万人。非交通高峰1~6节运行,节能低碳、噪声低、运行成本低,采用新能源光伏发电、制动发电、氢能源等绿色环保电能驱动,环保无污染,为现代国际化大城市提供了一种舒适、高端的市民出行交通服务方案。交通高峰地面自驾车拥堵1小时路程高速巴士公交车将10分钟到达,为减少城市碳排放、空气污染、倡导市民减少自架车、低碳环保出行,提供了智慧交通高端硬件支撑;
51.2、精准乘车智能运行快速高效。车辆先进的系统运行管理和无人智能驾驶系统,使乘客智能精准乘车,满员可直达最近目的地车站,运行效率高、速度快,节能,避免每站必停。
52.3、运行安全可靠。轨道和高速巴士公交车一体化设计融合为一个整体永远不会脱轨;无人智能驾驶系统自主导向与智能安全导向系统的辅助导向和安全支撑保护相结合,智能安全导向系统根据车辆运行状态、侧向风力大小、转弯离心力大小或车辆运行偏移量大小等自动调整安全导向轮与轨迹之间0~30mm的距离,精准控制辅助导向力大小和平衡稳定力大小,最大限度减少运行阻力;高速巴士公交车前后轮双动力驱动设计,即使其中一个动力系统故障,另一个动力系统仍能确保高速巴士公交车安全高效运行或到达下一个车站快速维修更换动力系统;突然停电自备电池能使车辆安全运行到下二个车站中的一个;新能源光伏发电系统提供环保辅助能源的同时兼顾了安全疏散通道的功能;若车辆突然因故需要紧急制动,车物联网系统立即与后面3~5辆车的车物联网系统联动,后面的3~5辆车将同步减速行驶,并依次往后面的车辆传递,实现安全协同运行;硬件和软件的协同作用,为车辆安全运行提供了多重安全保障。
53.4、轨道系统先进。本发明复合异型翼缘轨道系统,上下复合h结构基梁与异型翼缘轨道结合使综合结构强度抗弯抗扭刚度等均相互加强和提升,充分利用了城市低空交通资源,与实现同样功能的两个单轨道梁比结构优化、总重量轻量化、节材节能,综合性价比高;最小转弯半径20米、爬坡能力达到100
‰
,可架设在城市道路绿化带上或高速路边坡或中分带上、或山体隧道内、或地下隧道内;选线适应能力强、占地少、拆迁少,综合造价低。非交通高峰客运与物流共享轨道、科学融合,实现城市轨道交通资源效益最大化,减少政府财政补贴实现盈利。
附图说明
54.图1为本发明复合异型翼缘轨道及高速巴士公交车和磁浮轨道车横截面示意图。
55.图2为本发明复合异型翼缘轨道梁横截面立体示意图。
56.图3为本发明转向架的承载基架和安全导向架立体示意图。
57.图4为本发明安全导向单元和安全导向机构示意图。其中,图a:安全导向单元主视图,图b:安全导向单元俯视图,图c:u型安全导向柱立体图,图d:双区安全导向机构,图e:一安全导向组对的单区安全导向机构,图f:两安全导向组对的单区安全导向机构。
58.图5为本发明复合异型翼缘轨道及两种安全导向机构高速巴士公交车横截面单侧放大示意图,其中,a:为双区安全导向机构,b:为单区安全导向机构
59.图6为本发明转向架及动力行走机构侧视示意图。其中,a:为直线电机驱动及双区安全导向机构,b:为电机驱动及单区式安全导向机构。
60.图7为本发明转向架及动力行走机构示意图,其中,a:为直线电机驱动及双区安全
导向机构仰视图,b:为电机驱动及单区安全导向机构俯视示意图。
61.图8为本发明高速巴士公交车客车箱体及单区安全导向机构组合左视图示意图。
62.图9为本发明高速巴士公交车客车内座椅示意图。
63.图10为本发明复合异型翼缘轨道之上翼缘异型l轨道独立使用横截面示意图。
64.其中:1、h结构基梁,10、结构端梁,11、结构中梁、12、安装横梁,13、连接中梁, 14、减重孔,15、墩柱,1a、动力电缆孔,1b、通讯电缆孔,1f、通讯基站,1g、u型基梁,1h、新能源系统,2、下翼缘,20、下翼缘异型磁浮轨道,21、u型钢轨道,22、支撑轨道,2v、下翼缘异型磁浮轨道车,3、上翼缘,30、上翼缘异型l轨道,31、l竖边护板, 32、l水平边轨道面,33、l轨道面外展板,35、上智能安全导向轮轨迹,36、下智能安全导向轮轨迹,4、受电机构,41、上供电轨,42、下供电轨,4d、直线电机次级,4e、直线电机初级,4f、定位信号网,4g、位置信号测速器,5、智能安全导向系统,50、安全导向机构,51、安全导向轮,52、伸缩杆,53、伺服电动缸,5a、安全导向架,5b、u型柱腿, 5c、纵向安全柱,5d、中支撑柱,5e、u型底边,5f、u型中柱,6、行走机构,61、转向轮,62、转向轴,63、支撑轴,64、支撑轮,65、转向机构,66、减振悬挂机构,67、永磁同步电机,68、平行轴传动变速箱,69、电机控制器,6a、驾驶室,6b、设备室,6c、自备电池仓,6d、图像雷达识别测距装置,6e、牵引杆,6g、承载基架,6h、边纵梁,6j、边横梁,6k、中纵梁,6l、横梁,7、客车箱体,71、前后窗,72、侧面窗,73、车门,74、车门滑道,75、空调,76、座椅,77、客车底架,
具体实施方式
65.采用示意图和具体实施方式是对本发明作进一步说明,但本发明并不局限于此。本发明中使用的方位词,如“前”、“后”、“左”、“右”、“上”、“下”、“顶”、“底”、“纵”、“横”、“竖”、“内侧”、“外侧”等均以示意图为基准,仅为叙述的方便和相对位置,不代表实际方位,术语主要用于区分不同的部件,但不对部件进行具体限制。
66.实施例1:
67.本实施例提供转向架的结构。
68.一种转向架,包括承载基架6g和安全导向架5a,安全导向架5a安装在承载基架6g 下方。所述承载基架6g包括边纵梁6h、边横梁6j、中纵梁6k、横梁6l,在同一水平面上纵向平行整齐排列的两边纵梁6h的端部与两边横梁6j的端部垂直连接成矩形框架结构;3 支中纵梁6k在矩形框架结构内平行于边纵梁6h等间距或不等间距垂直安装在边横梁6j上; 2支横梁6l在矩形框架结构内平行于边横梁6j等间距或不等间距垂直平面交叉安装在边纵梁6h和中纵梁6k上,组成承载基架6g。
69.所述安全导向架5a包括u型安全导向柱、纵向安全柱5c、中支撑柱5d;u型安全导向柱为u矩形柱体结构,由u型柱腿5b、u型底边5e和u型中柱5f组成;左右u型柱腿5b相互平行,u型柱腿5b和u型底边5e垂直连接成一个整体;u型中柱5f安装于左右u型柱腿5b的中部,且平行于u型底边5e;前后各一支u型安全导向柱竖直镜像对称地设置在承载基架6g前后端下方,其u型柱腿5b顶端分别安装在前后边横梁6j的外侧面上;左右各一支纵向安全柱5c分别安装在前后两u型底边5e两端内侧;2中支撑柱5d的底端连接在纵向安全柱5c上,其顶端安装在横梁6l上或边纵梁6h上或其它适宜位置;优选的,所述u型安全导向柱可以独立使用;如图3所示。
70.实施例2:
71.其他同实施例1,不同之处在于:
72.所述转向架还包括驾驶室6a、设备室6b、自备电池仓6c,驾驶室6a、设备室6b、自备电池仓6c分别安装在承载基架6g底面的前部、中部和后部位置,本领域技术人员可以根据需要进行位置的调整;一般情况下,驾驶室6a用于安装无人智能驾驶系统、制动控制系统、电机操作机构、智能辅助导向控制系统等;设备室6b用于安装车辆管理系统、车门控制系统、车物联网系统、卫星定位系统等;自备电池仓6c用于安装自备电池、逆变器和电池管理系统等;本领域技术人员也可以根据需要对驾驶室6a、设备室6b、自备电池仓6c 所安装的设备进行调整。所述转向架还包括牵引杆6e,牵引杆6e前后各一个,分别安装在承载基架6g前后端边横梁6j外表面,牵引杆6e分别用于与前后车辆的连接,根据需要以实现2~15车或更多车的组列效率运行;如图6、图7所示。
73.实施例3:
74.其他同实施例2,不同之处在于:不含中纵梁6k和中支撑柱5d。
75.转向架,包括承载基架6g和安全导向架5a,安全导向架5a安装在承载基架6g下方。所述承载基架6g包括边纵梁6h、边横梁6j、中纵梁6k、横梁6l,在同一水平面上纵向平行整齐排列的两边纵梁6h的端部与两边横梁6j的端部垂直连接成矩形框架结构;5支横梁 6l在矩形框架结构内平行于边横梁6j等间距或不等间距垂直平面交叉安装在边纵梁6h上,组成承载基架6g。
76.所述安全导向架5a包括u型安全导向柱、纵向安全柱5c;u型安全导向柱为u矩形柱体结构,由u型柱腿5b、u型底边5e和u型中柱5f组成;左右u型柱腿5b相互平行, u型柱腿5b和u型底边5e垂直连接成一个整体;u型中柱5f安装于左右u型柱腿5b的中部,且平行于u型底边5e;前后各一支u型安全导向柱竖直镜像对称地设置在承载基架 6g前后端下方,其u型柱腿5b顶端分别安装在前后边横梁6j的外侧面上;左右各一支纵向安全柱5c分别安装在前后两u型底边5e两端内侧。
77.实施例4:
78.其他同实施例2,不同之处在于:
79.1支中纵梁6k在矩形框架结构内平行于边纵梁6h等间距或不等间距垂直安装在边横梁 6j上;3支横梁6l在矩形框架结构内平行于边横梁6j等间距或不等间距垂直平面交叉安装在边纵梁6h和中纵梁6k上,组成承载基架6g。
80.1支中支撑柱5d的底端连接在纵向安全柱5c上。
81.实施例5:
82.本实施例提供安全导向部件。安全导向单元部件包括安全导向单元、安全导向组对、安全导向机构50。本领域技术人员根据实际需要灵活选用。
83.所述安全导向单元包括安全导向轮51、伸缩杆52、伺服电动缸53,安全导向轮51、伸缩杆52、伺服电动缸53依次安装成一个整体结构。
84.左右各一套安全导向单元,其安全导向轮51朝外、伺服电动缸53朝内、镜像对称地安装在一起,组成一个安全导向组对。
85.安全导向机构50,包括安全导向组对,安全导向组对安装在安全导向架5a的u型安全导向柱上。安全导向机构50包括双区安全导向机构和单区安全导向机构。
86.一安全导向组对安装在u型安全导向柱的u型中柱5f上,其左右两端的安全导向轮51 对应轨道系统的上智能安全导向轮轨迹35;另一安全导向组对安装在u型柱底边5e上,其左右两侧的安全导向轮51对应轨道系统的下智能安全导向轮轨迹36,所述轨道系统的上智能安全导向轮轨迹35和下智能安全导向轮轨迹36,分别位于轨道系统的上下两个不同区域,称为双区安全导向机构。如图4a、图4b、图4c、图4d所示。
87.所述安全导向机构50可以设置在对应轨道系统的同一个区域,对应轨道系统的上智能安全导向轮轨迹35和/或下智能安全导向轮轨迹36也设置在轨道系统的同一区域,所述定位信号网4f同时也设置在轨道系统的同一区域,与车辆上的定位测速器4g的安装位置相对应。例如:一个安全导向组对安装在u型安全导向柱上,其左右两端的安全导向轮51对应轨道系统的上智能安全导向轮轨迹35或下智能安全导向轮轨迹36,称为单区安全导向机构;两个或两个以上的安全导向组对呈上下镜像对称地并列安装在一起,共同安装在u型安全导向柱上,其左右两端的安全导向轮51对应轨道系统上设置在同一个区域的上智能安全导向轮轨迹35和/或下智能安全导向轮轨迹36,亦称为单区安全导向机构。
88.实施例6:
89.本实施例提供智能安全导向系统5。
90.智能安全导向系统5包括安全导向部件和智能安全导向控制系统;安全导向部件由智能安全导向控制系统进行智能控制,所述安全导向部件选自安全导向单元、安全导向组对或安全导向机构50。
91.安全导向单元一端的安全导向轮51对应轨道系统上的上智能安全导向轮轨迹35或下智能安全导向轮轨迹36,安全导向单元的另一端可以安装在转向架上任何合适的位置,包括安全导向架5a上,或以其组合形式的安全导向组对或安全导向机构50安装在转向架上合适的位置,安全导向单元的安装位置和数量、或安全导向组对或安全导向机构50的安装位置,由本专业技术人员具体设计;安全导向单元由智能安全导向控制系统进行智能控制。如图1、图5、图6、图7所示。
92.实施例7:
93.本实施例提供高速巴士公交车。
94.所述高速巴士公交车包括实施例1-4的转向架、实施例6的智能安全导向系统,还包括行走机构、动力系统、安全运行系统、客车箱;智能安全导向系统5、行走机构、动力系统、安全运行系统安装在转向架下方或转向架与客车厢之间或部分在客车厢内,客车厢安装在转向架的上方。所述高速巴士公交车还包括车辆管理系统、无人智能驾驶系统、车物联网系统,均安装在车箱内或其它合适的位置。
95.所述行走机构6安装在转向架的承载基架6g下方,包括转向行走机构和支撑行走机构;转向行走机构包括转向轮61、转向轴62、转向机构65、减振悬挂机构66,转向轴62两端由内及外依次安装有转向机构65和转向轮61,转向机构65安装在转向轮61上,无人智能驾驶系统通过转向机构65控制转向轮61实现自主导向,转向轴62通过减振悬挂机构66安装在承载基架6g下方的前部;支撑行走机构包括支撑轴63、支撑轮64,支撑轴63的两端各安装有1~2支撑轮64,支撑轴63通过减振悬挂机构66安装在承载基架6g下方的后部。如图6、图7所示。
96.所述动力系统包括永磁同步电机67、平行传动变速箱68、电机控制器69;电机控制
器 69安装在永磁同步电机67的外壳上,永磁同步电机67的动力轴与平行传动变速箱68的动力输入端相连使永磁同步电机67和平行传动变速箱68组合为动力系统的整体结构,平行传动变速箱68的动力输出端即成为动力系统的动力输出端;一套动力系统上部安装在承载基架6g下方、下部安装在行走机构的转向轴62上,动力系统的动力输出端与转向轴62相连,以驱动转向轮61运行;另一套动力系统上部安装在承载基架6g下方、下部安装在支撑轴 63上,动力系统的动力输出端与支撑轴63相连,以驱动动力轮64运行;如图6b、图7b所示。
97.安全运行系统包括制动发电机构、制动控制系统、图像雷达识别测距装置6d、位置信号测速器4g;制动发电机构安装在转向轮61和支撑轮64上,制动发电机构在制动控制系统的控制下,根据无人智能驾驶系统的指令实施制动、保持或解除操作,制动控制系统安装在设备室6b内或车辆上其它适宜的位置,制动发电机构在车辆制动时发出的电能送往自备电池或动力电池;图像雷达识别测距装置6d前后各一对,分别安装在前后边横梁6j外侧面上,是自动驾驶识别前后车距离、速度,以及运行前方侵入运行安全区域的障碍物眼睛,确保行车安全;位置信号测速器4g安装在转向架的外侧,与轨道系统上的定位信号网4f相对应,为车辆的安全运行提供准确的位置信息。如图5、图6、图7所示。
98.所述客车箱,包括矩形立体结构客车箱体7,其前后端壁上安装有前后窗71;左右两侧壁上均安装有侧面窗72,一侧壁上安装车门,所述车门由自动滑动门73、车门滑道74组成,车门滑道74安装在自动滑动门73上下边缘对应的客车箱体7的外侧壁上,自动滑动门73 沿车门滑道74在车门控制系统的控制下自动打开或关闭,车门控制系统把车门的状态信息实时传给车辆管理系统,车门控制系统安装在设备室6b内;客车箱体7的底部是客车底架 77,是客车箱内乘客全部重量的支撑和安全保障构架,客车底架的上表面安装有1~12排座椅76或更多排座椅,每排座椅76设3~4个座席或更多个座席,根据需要进行设计;空调 75安装在客车箱的顶部,为客车箱夏天提供冷空气、冬天为客车箱提供热风,为乘客提供高端舒适的乘座环境;客车箱体7通过客车底架安装在承载基架6g上。所述客车箱体7是由铝合金材料制造而成、或由复合纤维材料制造而成;如图1、图5、图8、图9所示。
99.所述客车箱还包括视频监控识别系统、广播提醒系统,视频监控识别系统安装在客车箱内顶部的前后端各一个,用于对客车箱乘客的状况、空座状况进行识别;广播提醒系统安装在客车箱内顶部的前端,自动播报车到达车站的情况以及其它事项的提醒。
100.所述车辆管理系统设置在设备室6b内或车辆上其它适宜的位置,对无人智能驾驶系统、安全运行系统等、制动机构及车辆各机构的运行状态进行监测、系统管控,并与车物联网系统和卫星定位系统进行数据信息交换。
101.所述无人智能驾驶系统设置在自动驾驶室6a内或车辆上其它适宜的位置,是高速巴士公交车运行控制的大脑,主要包括无人驾驶信息系统、无人驾驶操作系统;把来自图像雷达识别测距装置6d、车辆管理系统、轨道通号系统、制动控制系统等系统的信息、以及运行中央云平台的指令信息等融合为运行控制数据,、进行数据计算、处理分析、并形成驾驶操作指令,驾驶高速巴士公交车安全运行。具体由本领域技术人员进行专业设计和制造。
102.所述车物联网系统安装在设备室6b内或车辆上其它合适的位置,是高速巴士公交车对外通讯的核心系统,与运行中央云平台、前后高速巴士公交车的进行通讯和数据信息交换,把车的设备状态、实时位置、运行速度等实时发送给运行中央云平台和前后各3-5辆车的车物联网系统,以实现前后各3~5辆车安全协同运行。
103.实施例8:
104.其他同实施例7,不同之处在于,
105.所述动力系统还包括自备电池系统和供电系统。所述自备电池系统包括自备电池和电池管理系统,自备电池和电池管理系统均安装在自备电池仓6c内,自备电池仓6c自带充电系统,当外供电源突然停电后,在电池管理系统控制下,自备电池自动向全车供电,自备电池的储电量足够使车辆能安全到达前方二个车站中的一个。所述供电系统包括受电机构4和上供电轨41;上供电轨41安装在轨道系统的上翼缘3外侧或其它适宜的位置,受电机构4 一端安装在承载基架6g上,另一端与上供电轨41保持紧密接触保持正常供电,为在轨道系统上运行的车辆供电。如图1、图5、图6、图7所示。
106.实施例9:
107.其他同实施例8,不同之处在于,
108.所述动力系统的永磁同步电机67可由直线电机替代,所述直线电机是长次级短初级结构,包括直线电机次级4d、直线电机初级4e、逆变器;一条直线电机次级4d安装在轨道系统的结构端梁10和结构中梁11的上表面;一只直线电机初级4e安装在转向架底部的u 型柱底边5e上,与直线电机次级4d位置相对应,逆变器安装在自备电池仓6c内,为直线电机初级4e供电。如图6a、图7a所示。
109.实施例10:
110.其他同实施例8,不同之处在于,
111.所述动力系统可由氢动力系统替代,氢动力系统包括动力电池、储氢仓、氢电池堆、氢电池升压器和动力控制单元;动力电池安装在自备电池仓6c内或车辆上其它适宜的位置,动力电池用于加速时辅助氢电池堆供电,动力控制单元设在自备电池仓6c内或车辆上其它适宜的位置,用于控制动力电池的充放电;储氢仓设置于设备室6b内或车辆上其它适宜的位置;氢电池堆和氢电池升压器安装在自备电池仓6c内或车辆上其它适宜的位置,氢电池升压器将氢电池堆的电能升压后供给永磁同步电机67;动力电池可替代自备电池。
112.实施例11:
113.本实施例提供基于复合异型翼缘轨道的高速巴士公交系统。
114.基于复合异型翼缘轨道的高速巴士公交系统,是基于h结构基梁1的复合异型翼缘轨道的高速巴士公交系统,包括复合异型翼缘轨道系统、实施例8-12的高速巴士公交车、运行中央云平台,复合异型翼缘轨道系统架设在地面墩柱15上或山体隧道内、或地下隧道内沿规划路线延伸;在运行中央云平台的指挥控制和管理下,高速巴士公交车在无人智能驾驶系统驾驶下,沿着复合异型翼缘轨道系统高速安全运行。
115.所述复合异型翼缘轨道系统,其特征在于以h结构基梁1为基础,其上翼缘设有的上翼缘异型l轨道30与下翼缘设有下翼缘异型磁浮轨道20上下复合组成一种复合异型翼缘轨道系统,包括h结构基梁1、上翼缘异型l轨道30、下翼缘异型磁浮轨道20、安装横梁12、连接中梁13、墩柱15和新能源系统1h。在同一水平面上左右镜像对称纵向平行布置的两榀h结构基梁1,在其相对应内侧面的前后两端各设有一个安装横梁12、在前后安装横梁 12之间纵向均匀分布设有0~20个或更多个矩形空心结构的连接中梁13,把左右h结构基梁1连结成一榀轨道梁;多榀h结构基复合异型翼缘轨道梁的前后安装横梁12分别连续架设在墩柱上,墩柱每间隔5~120米一根安装在规划路线的地面上连续延伸;所述地面优选道路两侧
的绿化带、或道路中心绿化带、或高速路中分带、或高速路两侧的边坡;新能源系统1h架设在安装横梁12、连接中梁13的上表面及左右h结构基梁1的侧面上,并与h结构基梁1侧面之间留有除雪和雨水分流缝隙,所述新能源系统1h(例如光伏发电)为轨道照明系统、通讯系统或动力系统提供辅助清洁能源。如图1和图2所示。
116.所述h结构基梁1,包括竖直翼缘梁、结构端梁10。在同一水平面上左右各一支竖直翼缘梁纵向平行镜像对称布置,在两竖直翼缘梁的两端相对应内侧面上各设一个结构端梁10,两个结构端梁10之间纵向均匀分布设有0~20个或更多个的结构中梁11,结构端梁10和结构中梁11上表面和下表面分别在两个平行平面上,把左右的竖直翼缘梁在其中部区域连接为一个整体,组成h结构基梁1;所述结构端梁10和结构中梁11均设有一个或多个减重孔14,所述竖直翼缘梁是空心结构或实心结构、竖直翼缘梁及其与结构端梁10和结构中梁 11的连接处是空心结构或根据结构及强度需要选用实心结构,实现h结构基梁1结构的优化和轻量化;所述h结构基梁1、结构端梁10和结构中梁11由钢筋混凝土整体浇铸而成、或由钢材加工而成、或由复合材料制造而成;优选的,所述h结构基梁1的上翼缘3和下翼缘2可以是对称矩形结构,其突出特征是非对称结构,上翼缘3优化减薄,实现轻量化。如图1、图2所示。
117.所述上翼缘异型l轨道30,包括h结构基梁1和l结构轨道,以h结构基梁1为基础,其左右两个上翼缘3的上表面各设有一条l结构轨道。所述l结构轨道包括l竖边护板31 和l水平边轨道面32,l竖边护板31和l水平边轨道面32之间呈85-95度夹角,其l竖边护板31朝上、外侧面与上翼缘3的外侧面在同一竖直面上,其l水平边轨道面32向内水平安装在上翼缘3的上表面,上翼缘异型l轨道30沿h结构基梁1纵向延伸;l水平边轨道面32向内侧超出上翼缘3宽度的部分称为l轨道面外展板33;如图1、图2所示。
118.所述下翼缘异型磁浮轨道20,包括h结构基梁1、u型钢轨道21、支撑轨道22,以h 结构基梁1为基础,其左右两个下翼缘2外侧或内侧各设置有一条支撑轨道22,左右支撑轨道22在同一水平面上镜像对称设置;左右各一条u型钢轨道21安装在下翼缘2的底面上,左右u型钢轨道21在同一水平面上镜像对称设置;所述u型钢轨道21、支撑轨道22 均沿着h结构基梁1的纵向连续延伸。所述u型钢轨道21由钢热轧制而成或由钢板焊接而成。所述下翼缘异型磁浮轨道20还包括下供电轨42,下供电轨42安装在下翼缘异型磁浮轨道20上,为在下翼缘异型磁浮轨道20上运行车辆供电,其电源由设在动力电缆孔1a内的动力电缆供给。优选的,所述h结构基梁1、下翼缘2、内悬挂轨道21均由钢筋混凝土或采用纤维增强钢筋混凝土浇铸成一个整体结构,或用钢材制造而成、或采用复合材料制造而成。如图1、图2所示。
119.所述运行中央云平台是高速公交车系统运行的大脑、信息数据存储和交换中心、信息数据计算处理中心、系统运行指挥管理中心,接收和处理每一辆高速巴士公交车物联网系统以及轨道系统、轨道通号系统、车站、供电系统等每个独立运行系统运行信息和设备状况信息。对临时出现的运行状况进行及时处理,立即调度并发出指令,以保证高速公交车系统安全和高效运行。
120.基于复合异型翼缘轨道的高速巴士公交系统的运行方法:
121.1)高速巴士公交车为全座席高端舒适的公交车,每个车门有相对的两排舒适座椅,6~ 8个席位,在运行中央云平台、车辆管理系统等系统协同管理下,无人智能驾驶系统驾驶车辆由始发站在复合异型翼缘轨道系统上出发;始发站的车站管理系统把本站上车乘客数量、对应的车厢信息和乘客到达目的地车站的信息发送给车物联网系统,车物联网系
统把信息由内部线路传送到车辆管理系统,车辆管理系统通过车内视频监控识别系统核对每一排乘客的数量和空位数,并与接收到的车站管理系统信息进行交叉核实;
122.2)在复合异型翼缘轨道系统上运行的高速巴士公交车的设备状态、实时位置、运行速度等通过车物联网系统实时发送给运行中央云平台和前后各3~5辆车的车物联网系统,以实现前后各3~5辆车安全协同运行。例如有一辆车因故需要紧急制动,后面的3~5辆车将同步减速行驶,并依次传递给后面的车辆,实现安全协同运行;车内空位的数量和对应车门信息、乘客到达目的站的信息、车内乘客的状态(预防紧急情况)等由车辆管理系统由内部线路传送给车物联网系统,车物联网系统实时发送给运行中央云平台和前方的车站管理系统;
123.3)若本列车内乘客已满座,该辆车将启动直达最近目的地车站的运行模式,车辆管理系统通过车物联网系统把该辆车将直达运行的信息发送给运行中央云平台和最近目的地车站,车辆管理系统对无人智能驾驶系统下达直达运行指令和最近目的地车站信息,该辆车将以120~160公里/小时的速度直达最近目的地车站,为乘客提供了拥堵城市背景下的高速、高效、舒适、高端交通服务,地面自驾车拥堵1小时路程高速巴士公交车将10分钟到达;
124.4)高速巴士公交车到达前方的车站之前,车站管理系统已经将即将到站的该编组车每个车门的空座数量显示在车站对应的车门候车区,乘客打卡并按提示点中自己待到达目的地车站的名字后,乘客即可进入对应的车门候车区,实现乘客精准乘车;
125.5)高速巴士公交车到达车站后,乘客先下后上,刚刚下车的乘客逐一刷卡走出车门候车区。假若车内有1名乘客到达目的地车站后没有下车,刷卡走出车门候车区的乘客将少1 人,待上车的乘客将有1人仍然待在车门候车区无法上车,车站该车门候车区将自动用声音提醒乘客,请乘客耐心等待,下一班车将在1.5或2分钟后到达;
126.6)刚刚驶离车站的高速巴士公交车,若本列车内乘客已满座,将重复3)的操作;
127.7)运行中央云平台根据各车站客流量大数据计算和图象识别,对出现客流较大的车站采用空车直达的运行方式,快速疏解密集车站的客流,提高市民出行交通质量,提升城市运行效率,实现智慧城市智慧交通;
128.8)非交通高峰期,高速客运车将与高速物流车交替通行,实现交通资源效益最大化。
129.实施例12:
130.其他同实施例11,不同之处在于,
131.所述上翼缘异型l轨道30还包括上智能安全导向轮轨迹35、下智能安全导向轮轨迹36、上供电轨41。上智能安全导向轮轨迹35位于左右l竖边护板31的内侧面,下智能安全导向轮轨迹36位于左右上翼缘3内侧面上;上供电轨41安装在h结构基梁1的外侧或其它适宜安装的位置,为在翼缘异型l轨道30上运行的车辆供电,其电源由设在动力电缆孔1a 内的动力电缆供给。所述上翼缘异型l轨道30由钢筋混凝土或采用纤维增强钢筋混凝土浇铸成一个整体结构,或用钢材制造而成、或采用复合材料制造而成。如图1、图2所示。
132.实施例13:
133.其他同实施例12,不同之处在于,
134.所述上翼缘异型l轨道30还包括轨道通号系统。
135.轨道通号系统包括通讯电缆、定位信号网4f、卫星定位系统、通讯基站1f、上翼缘异型l轨道讯号系统。通讯电缆布置在通讯电缆孔1b内,以实现车辆、轨道、车站和运行中央云平台之间有线和无线通讯的双保险、以及信息的相互验证确认;定位信号网4f安装在上翼缘3内侧面上,与在轨道运行车辆上的位置信号测速器4g相对应安装,以实现无人智能驾驶车运行过程中的精准定位和到达车站后的精准定位停车;卫星定位系统安装在设备室 6b内或其它适宜的位置,卫星定位信息与位置信号测速器4g交叉相互校对,以位置信号测速器4g为主确保无人智能驾驶准确、快速、安全运行;通讯基站1f安装在墩柱上,包括 5g或6g等低延时高速度的无线通讯设备,车辆的车物联网系统通过通讯基站1f与前后车辆、车站和运行中央云平台保持信息通讯。
136.上翼缘异型l轨道讯号系统包括上翼缘异型l轨道状态信息、道叉状态信息、车站状态信息、乘客信息、车辆位置信息等车辆安全运行的重要信息,通过布置在通讯电缆孔1b内的通讯电缆传送到沿线每个车站控制系统和运行中央云平台、并通过通讯基站1f无线传送到高速巴士公交车,实现信息交叉确认,确保信息准确、安全。如图5、图6、图7所示。
137.实施例14:
138.其他同实施例12或13,不同之处在于:
139.所述上翼缘异型l轨道30可以做为独立轨道使用,所述h结构基梁1由u型基梁1g 替代,所述u型基梁1g包括竖直翼缘梁、结构端梁10、结构中梁11,在同一水平面上左右各一支纵向平行布置的竖直翼缘梁,在两竖直翼缘梁相对内侧面的底部区域的两端各设一个结构端梁10,沿两竖直翼缘梁内侧面的底部区域、两个结构端梁10之间均匀分布设置有 0~20个或更多个的结构中梁11,把左右的竖直翼缘梁连接为u型基梁1g的整体结构,其上部的翼缘称为上翼缘3。所述上翼缘异型l轨道30设置在u型基梁1g的上翼缘3上,其余结构与上述上翼缘异型l轨道30完全一致。如图10所示。
140.实施例15:
141.其他同实施例11-14,不同之处在于:
142.一种基于复合异型翼缘轨道的高速巴士公交系统,还包括一种高速巴士中车,所述高速巴士中车是挂在高速巴士公交车后面,跟随高速巴士公交车共同运行;高速巴士中车包括转向架、智能安全导向系统、行走机构、动力系统、安全运行系统、客车箱等,与上述高速巴士公交车不同之处是缺少了无人智能驾驶系统和车物联网系统,其它构成与高速巴士公交车完全相同。高速巴士中车的启动、加速、制动、停车等运行操作、以及对外信息数据交换等操作命令全部都由其前面的或头尾的高速巴士公交车发出命令,高速巴士中车只是同步执行命令。高速巴士中车与高速巴士公交车之间的所有信息、执行指令的通讯均由内部通讯电缆来完成,确保信息传输无误。每辆高速巴士公交车后面可以挂1~15辆或更多辆高速巴士中车,本专业技术人员根据车站设计大小和需要进行设计。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。