1.本实用新型涉及一种爬杆机器人自锁抱柱装置,应用于输电杆塔、桥梁缆索、罐道钢丝绳等竖直杆体的高空检测维修工作中。
背景技术:
2.随着我国西电东送工程、桥梁建设、罐道建设等基建事业的发展,输电杆塔、桥梁缆索、罐道钢丝绳等竖直杆体得到了广泛应用,对其进行定期检测维修是保障此类基础设施安全稳定运行的必要措施。近年来,对应的工人检测维修的速度逐渐跟不上我国基建事业在全国范围内的全速发展,大量设施普遍存在年久失修的情况。目前大多采用人工高空作业维护法,工作效率低且危险系数高。而对竖直杆体进行检测维护的装置研究较少,且种类驳杂,缺少稳定的模块化设计。本实用新型确立了爬杆机器人自锁抱柱装置的设计目标,作为杆外壁高空施工机器人的统一驱动装置,可通过搭载各类作业模块实现包括输电杆塔、桥梁缆索、罐道钢丝绳等多种竖直杆体的施工维护等作业,取代人工维护以降低各类高空作业的危险系数。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种爬杆机器人自锁抱柱装置。解决上述技术问题,本实用新型所采取的技术方案如下:
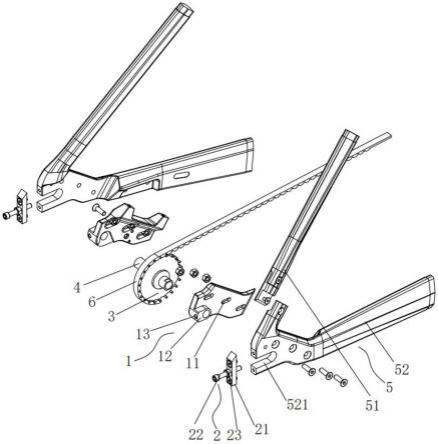
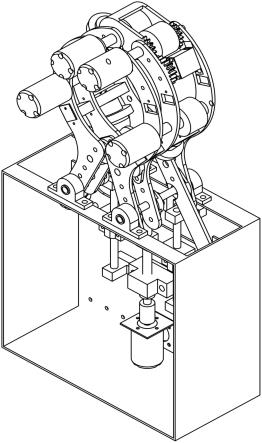
4.一种爬杆机器人自锁抱柱装置,其特征在于,包括箱体平台,设置在箱体平台上的两个弧形臂,两个弧形臂顶部通过自动卡扣机构将其连接在一起;能够驱动所述爬杆机器人自锁抱柱装置绕柱旋转运动的设置在弧形臂上,能够驱动爬杆机器人自锁抱柱装置绕柱升降运动的升降结构安装在两个弧形臂之间。
5.在上述的一种爬杆机器人自锁抱柱装置,弧形臂包括上爪夹、中爪夹以及下爪夹;上爪夹、中爪夹、下爪夹通过固定轴固定并相互平行,且每一片爪夹上均开设有多个沿固定轴延伸方向间隔布置的定位孔;弧形臂通过立式轴承座固定在箱体平台上,且连杆一端通过固定轴安装在弧形臂上,另一端与丝杆铝板相连接,连杆与上爪夹中爪夹、下爪夹均互相平行。丝杆套入丝杆螺母固定在丝杆铝板的中间,丝杆与电机相连接。
6.在上述的一种爬杆机器人自锁抱柱装置,滚动机构设有四套,每个弧形臂上设有两套,每一套滚动机构包括横向转动摩擦轮、摩擦轮垫片、摩擦轮阶梯轴和3510电机,横向转动摩擦轮的两端均安装有摩擦轮垫片,两者通过摩擦轮阶梯轴安装在弧形臂的上爪夹和中爪夹之间,且摩擦轮阶梯轴的一端穿过上爪夹上的定位孔,另一端则穿过下爪夹上的定位孔与3510电机相连接。
7.在上述的一种爬杆机器人自锁抱柱装置,升降机构设有三套,每套升降机构包括纵向转动摩擦轮、2312s电机和纵向摩擦轮支撑架组成,纵向转动摩擦轮固定在2312s电机上,且2312s电机一端与弧形臂之间的纵向摩擦轮支撑架通过定位孔相连接。
8.在上述的一种爬杆机器人自锁抱柱装置,所述弧形臂之间的自动卡扣机构包括舵
机、驱动齿轮、从动齿轮、固定轴和卡扣。舵机通过固定轴与驱动齿轮连接,固定在中爪夹上。固定轴的一端穿过中爪夹上的定位孔使得驱动齿轮固定在中爪夹上。卡扣固定在横向转动摩擦轮的摩擦轮垫片上,卡扣的从动齿轮(26)与驱动齿轮啮合。
9.在上述的一种爬杆机器人自锁抱柱装置,与丝杆螺母相连接的底面安装有牛眼轮。
10.在上述的一种爬杆机器人自锁抱柱装置,与丝杆螺母相连接的底面安装有光杆。
11.在上述的一种爬杆机器人自锁抱柱装置,横向转动摩擦轮沿着抱合管道轴的水平方向均匀间隔布置。
12.与现有技术相比,本实用新型具有以下有益效果:第一,写升降机构和转动机构的优点特征本实用新型设有四套转动机构,三套升降机构,利用三套升降机构能够调整抱合管道的规定高度,使得装置移动到抱合管道上的相应位置以待使用: 而由于四套转动机构的作用,能够转换装置检修抱合管道的角度,达到全面观察的效果;因此,本实用新型能够快速、方便地为管道巡检维修提供辅助。第二,本实用新型采用设置搭载平台的方式,在平台上可以安装不同的巡检维修装置,其成本低,且安装模块的拆卸和安装方便,能够提高工作效率。第三,本实用新型采用三套摩擦轮组成升降机构,其使用方便、承担搭载平台的能力强,可靠性高,并能够实现搭载平台施工的稳定性和连续性。第四,本实用新型能够充分考虑现场施工需求,并且本实用新型的材料购置成本及摊销成本低,制作材料容易获取。
附图说明
13.图1为本实用新型的爬杆机器人自锁抱柱装置的结构示意图:
14.图2为图1的俯视图:
15.图3为图1的左视图;
16.图4为本实用新型中自动卡扣机构的结构示意图:
17.图5为本实用新型中升降机构的结构示意图:
18.图6为本实用新型中滚动机构的结构示意图:
19.图中,弧形臂1、卡扣2、升降机构3、转动机构4、横向转动摩擦轮5、上爪夹6、中爪夹7、下爪夹8、驱动齿轮9、电机10、丝杆11、箱体平台12、摩擦轮垫片13、摩擦轮阶梯轴14、3510电机15、2312s电机16、纵向摩擦轮支撑架 17、牛眼轮18、立式轴承座19、固定轴20、连杆21、光杆22、丝杆螺母23、轴25、从动齿轮26、纵向转动摩擦轮27、舵机28。
具体实施方式
20.如图1至图6所示,本实用新型公开的是一种爬杆机器人自锁抱柱装置,设有三套升降结构3、四套转动结构、一个箱体平台和一个自动卡扣机构,卡扣2安装在两个弧形臂1之间,其发明构思为:本实用新型的爬杆机器人自锁抱柱装置设有的三套升降机构3和四套转动机构4,每一套滚动机构4通过一个横向转动摩擦轮5安装在一个弧形臂1的上爪夹6和中爪夹7之间,每一套升降结构均通过一个纵向转动摩擦轮27装置安装在两个弧形臂1之间,使得:三套升降结构3能够驱动爬杆机器人自锁抱柱装置绕柱升降运动,四套转动结构能够驱动所述爬杆机器人自锁抱柱装置绕柱旋转运动。
21.本实用新型的爬杆机器人自锁抱柱装置的使用方式如下:
22.首先,打开自动卡扣机构2相连的舵机28,舵机28带动驱动齿轮9,将自动卡扣2打开,再打开电机10,电机10驱动丝杆11带动丝杆铝板24平移,与丝杆铝板相连接的连杆21同时带动弧形臂1张开。将弧形臂1调整到合理的开口弧度安装至所需的检测的管道上;然后,利用三套升降结构3使得相应规格的箱体平台12被抬升到合适的高度以待使用,其中,箱体平台12可以搭载不同的仪器来实现多种多样的管道检测维修等多种功能。
23.在上述发明构思的基础上,本实用新型采用以下优选的结构:
24.作为本实用新型的优选实施方式:升降机构3由纵向转动摩擦轮27、2312s电机 16和纵向摩擦轮支撑架17组成,纵向转动摩擦轮27固定在2312s电机16上,且2312s电机16一端与弧形臂1之间的纵向摩擦轮支撑架17通过定位孔相连接。 (如图5至图6)所示,滚动机构4由横向转动摩擦轮5、摩擦轮垫片13、摩擦轮阶梯轴14和3510电机15组成,横向转动摩擦轮5的两端均安装有摩擦轮垫片 13,两者通过摩擦轮阶梯轴14安装在弧形臂1的上爪夹6和中爪夹7之间,且摩擦轮阶梯轴14的一端穿过上爪夹6上的定位孔,另一端则穿过下爪夹8上的定位孔与3510电机15相连接。三套升降机构3能够驱动爬杆机器人自锁抱柱装置升降运动,四套转动机构4能够驱动爬杆机器人自锁抱柱装置旋转运动,2312s电机为升降电机,3510电机为滚动电机。
25.作为本实用新型的优选实施方式:弧形臂1由上爪夹6、中爪夹7、下爪夹8、固定轴20、连杆21、光杆22、丝杆11、丝杆螺母23、丝杆铝板24和电机10 组成。弧形臂1设有三片爪夹,上爪夹6、中爪夹7、下爪夹8通过固定轴20固定并相互平行,且每一片爪夹上均开设有多个沿固定轴20延伸方向间隔布置的定位孔;上爪夹6、中爪夹7、下爪夹8组成弧形臂1,弧形臂1通过立式轴承座19固定在箱体平台12上,且连杆21一端通过固定轴20安装在弧形臂1上,另一端与丝杆铝板24相连接,连杆21与上爪夹6、中爪夹7、下爪夹8均互相平行。丝杆11套入丝杆螺母23固定在丝杆铝板24的中间,丝杆11与电机10 相连接。电机10驱动丝杆11带动丝杆铝板24平移,与丝杆铝板相连接的连杆 21同时带动弧形臂1实现张开和闭合的功能。
26.作为本实用新型的优选实施方式:
27.弧形臂1之间的闭合卡扣机构由舵机28、驱动齿轮9、从动齿轮26、固定轴25 和卡扣2组成。舵机28通过固定轴25与驱动齿轮9连接,固定在中爪夹7上。固定轴25的一端穿过中爪夹7上的定位孔使得驱动齿轮9固定在中爪夹7上。卡扣2固定在横向转动摩擦轮5的摩擦轮垫片13上,卡扣2的从动齿轮26与驱动齿轮9啮合。舵机28通过控制驱动齿轮9转动带动从动齿轮26转动来控制卡扣2的开合。
28.作为本实用新型的优选实施方式:与丝杆螺母23相连接的底面安装有牛眼轮 18。
29.作为本实用新型的优选实施方式:与丝杆螺母23相连接的底面安装有光杆2,以增加结构稳定性和稳固性,延长装置使用寿命。
30.作为本实用新型的优选实施方式:装置所使用的固定轴均采用钢管,上爪夹6、中爪夹7、下爪夹8均采用铝合金。
31.作为本实用新型的优选实施方式:爬杆机器人自锁抱柱装置设有四转动机构4, 同一个转动机构4上的各套横向转动摩擦轮5沿着抱合管道轴的水平方向均匀间隔布置,以便于加快机器人绕柱运动速度,保证机器人抱柱的稳定性
32.本实用新型不局限于上述具体实施方式,根据上述内容,按照本领域的普通技术
知识和惯用手段,在不脱离本实用新型上述基本技术思想前提下,本实用新型还可以做出其它多种形式的等效修改,替换或变更,均落在本实用新型的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。