1.本发明属于船舶与海洋工程装备设计制造技术领域,具体地说,是一种浮冰区海洋结构物性能水池实验装置及方法,能够真实有效模拟浪流环境下浮冰的漂移运动及研究海洋结构物性能。
背景技术:
2.北极海上油气资源十分丰富,随着陆地及近海油气资源的日益枯竭,极地海域的油气资源开发吸引了世界各国的关注,北极正成为继中东之后的另一片热土。北极地区油气资源的勘探、采集、存储、运输将会带来对适用于极地作业的海洋装备的巨大需求,随之而来的是对极地海洋装备的设计研发和安全作业的更高要求。
3.海洋结构物与海冰相互作用的动态模拟,一直是国内外学者研究的重点和难点,具体体现在海冰物理及力学性质复杂、冰载荷难以准确计算、系泊系统-结构物-海冰三者的耦合模拟难以实现等方面。为进一步提高极地装备钻采作业安全性和作业周期,急需开展相关的浪流与浮冰耦合环境中海洋结构物性能研究。其中,实验研究起着举足轻重的作用。海洋工程水动力实验是在船模实验的基础上发展而来,自20世纪70年代开始考虑建设专门用于海洋平台模型试验的海洋工程水池,20世纪80年代初挪威率先建成这种水池,用于模拟风、浪、流等海洋环境条件,我国也陆续建成了多种尺寸的风、浪、流海洋工程水池,基本可以满足常规海域海洋结构物性能的实验需求。然而,现有水池以完全自由表面假定为前提,无法满足浮冰区海洋结构物性能探究的迫切需求。
4.现有技术中申请公布号cn111307409a公开了一种单块海冰在波浪条件下运动学响应试验测量装置及方法,其主要通过造波机在实验水池中制造波浪,利用被支架固定在主拖车上的高速摄像装置捕捉海冰上的标志物实时动态位置,然后将数据记录下来传输到计算机上,最后分析转化为海冰中心处的动态位置。但是,该装置探讨的只是单块浮冰在波浪条件下的偏移及运动,难以有效模拟多块浮冰受浪流耦合条件的影响作用,更无法进一步探究在浪-流-冰耦合环境下海洋结构物的载荷响应。
技术实现要素:
5.本发明的目的是提供一种能够真实有效模拟浪流环境下浮冰的漂移运动及研究海洋结构物性能水池实验装置及方法。
6.本发明采用的具体技术方案如下:一种浮冰区海洋结构物性能水池实验装置,包括实验水池、浮冰布放机构、结构物固定机构、造流机构和造浪机构,浮冰布放机构主要由浮冰运输机构和浮冰下放机构组成,浮冰运输机构整体置于矩形实验水池左端,可以根据实验研究需求持续快速向位于水池首端上方的浮冰下放机构输送浮冰,且在浮冰数量满足要求时及时下放以保证实验的稳定进行;结构物固定机构同样安装在实验水池上方且靠近水池尾端处,可以通过自由调整海洋结构物模型的吃水深度以及距离浮冰区的相对位置,以探究海洋结构物的冰水载荷响应;
造流机构通过连通管连接实验水池首尾两端,通过驱动水泵形成循环水流,与造浪机构共同工作形成实验所需的浪流耦合环境。
7.作为优选,浮冰运输机构安装在实验水池左侧的移动托架上,包括离心转盘、横向输送机构和纵向输送机构,所述移动托架底部装有移动万向轮,可任意角度移动调整位置进而改变浮冰区的相对位置,并且承重力强起到一定程度缓冲减震的作用。离心转盘包括输出电机、主动齿轮、从动齿轮、转轴、转盘、浮冰导向板和进口挡板,离心转盘靠齿轮啮合驱动旋转,离心转盘外圈固定有圆形挡边条,上方设有对浮冰进行引导的导向板,且导向板与挡边条内侧装有用于对超过预设高度的堆叠浮冰进行阻挡限制的限高进口挡板,进口挡板与离心转盘间的空隙略高于浮冰厚度,可将实验所需浮冰进行离心有序输送至横向输送机构上。
8.作为优选,横向输送机构在两侧框架间等距排列有若干相同的传动轴、传动齿轮、带轮和辊子,靠近纵向输送机构处向下有较小的倾斜角,浮冰在摩擦力作用下依次向前传送,每隔2条辊子上的带轮通过皮带驱动,传动齿轮均通过键连接的方式分别固定在传动轴与辊子两端。
9.作为优选,横向输送机构与纵向输送机构相互垂直且等高,两者连接处装有通过焊板固定在传输通道两侧弧形轨道板,内外侧轨道板能有效保证浮冰在指定范围内传送,纵向输送机构的输送电机与滚筒之间通过带传动驱动,且输出口高度高于浮冰下放机构。
10.作为优选,浮冰下放机构包括移动框架、滚轮、导轨、可抽离底板、隔板若干和套筒,隔板垂直于可抽离底板,通过两侧套筒安装在移动框架左右两侧的导轨上,可根据浮冰尺寸来自由移动调整隔板数量以及改变彼此间间距;可抽离底板靠近输送机构一侧高度略高,输送的浮冰可依据自身重力向另一侧滑动直至所有列浮冰数量满足需求,则抽离可抽离底板使得浮冰落入实验水池。
11.作为优选,浮冰布放机构设有浮冰监测设备,所述浮冰监测设备包括数据处理器、非接触式六自由度测量仪和粘贴在浮冰上的红外光球,当浮冰在浪流耦合作用下移动至监测区域处,非接触式六自由度测量仪迅速精准捕捉到这些红外光球,并将所测得的数据及时传输至数据处理器中,进而可以计算出浮冰的相对位移。
12.作为优选,所述结构物固定机构左右两侧均装有两根自动升降杆,所述自动升降杆为可伸缩空心圆柱体杆,通过液压缸进行驱动,杆顶端连接有连接海洋结构物的固定支架;当研究浪流环境下浮冰的运动、漂移状况时,升降杆上升使得结构物脱离水面,固定于水池上方;当需要研究结构物性能时则及时下放并且根据需要调整其吃水深度。
13.作为优选,所述结构物固定机构采用四指机械爪结构来固定海洋结构物,所述机械爪顶部连接处装有旋转底座,爪身以液压缸作为动力模块,动力模块与四指机械爪结构传动连接;四指机械爪结构主要由四组大小相等的驱动连杆和爪体铰接构成,所述爪体末端固接有防滑垫片;所述海洋结构物前端粘贴有应变片,当应变施加到应变片上时可及时将变化反映至专用应变测量仪中。
14.作为优选,所述造浪机构主要置于实验水池首端,依靠驱动部件推动在水池内循环往复的推板造成实验所需波浪;造流机构的连通管两端分别与水池首端的进水口和水池末端的出水口相连,通过水泵形成稳定循环水流。
15.一种浮冰区海洋结构物性能水池实验方法,使用上述的浮冰区海洋结构物性能水
池实验装置,具体包括以下步骤:步骤一、确定实验研究对象,确认是否需要放入海洋结构物;步骤二、注入实验用水,确保水位高度达到实验所需高度;步骤三、放入浪高仪,打开造波机构和造浪机构,对水流和实验波浪进行校验,保证实验准确性;步骤四、校波完成,取出浪高仪,将实验装置所有机构移至实验指定位置处;步骤五、实验开始,打开造流机构和造浪机构,浮冰布放机构开始工作。
16.本发明的有益效果:与现有水池实验装置相比,本发明具有以下显著优点:本装置可以根据实验研究对象是浮冰还是海洋结构物采取不同作业方案,有效控制浮冰区的相对位置及数量,灵活调整浮冰的空间分布形式,根据实验需求持续稳定的向水池中输送浮冰,进而进一步研究浮冰的漂移运动或结构物的载荷特性;同时,还可适用于浮式平台、船体等多种模型结构研究工作,并可自由调节其吃水深度及浪倾角角度。
附图说明
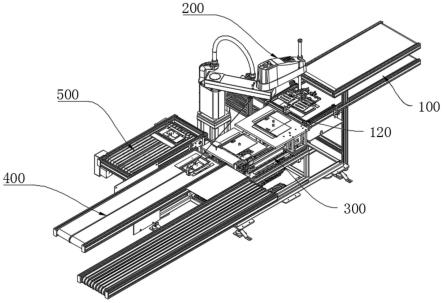
17.图1为本发明在浪-流-冰耦合条件下研究海洋结构物性能实验模拟图。
18.图2为本发明浮冰在浪流耦合作用下漂移、运动实验模拟图。
19.图3为本发明浮冰布放机构空间布置示意图。
20.图4为本发明浮冰布放机构中离心转盘结构爆炸图。
21.图5为本发明浮冰布放机构中横向输送机构结构示意图。
22.图6为本发明浮冰布放机构中单个传送辊结构爆炸图。
23.图7为本发明浮冰布放机构中纵向输送机构结构示意图。
24.图8为本发明浮冰下放机构结构爆炸图。
25.图9为本发明结构物固定机构结构示意图。
26.图10为本发明结构物固定机构机械爪结构爆炸图。
27.图11为本发明造波机构和造浪机构空间示意图。
28.图12为本发明所述装置使用流程图。
29.图中,1-实验水池,2-浮冰布放机构,3-结构物固定机构,4-造流机构,5-造浪机构,21-浮冰运输机构,22-浮冰下放机构,211-移动托架,212-离心转盘,213-横向输送机构,214-纵向输送机构,2111-移动万向轮,2121-输出电机,2122-主动齿轮,2123-从动齿轮,2124-转轴,2125-转盘,2126-浮冰导向板,2127-进口挡板,2131-两侧框架挡板,2132-传动轴,2133-传动齿轮,2134-带轮,2135-辊子,2136-罩壳,2141-机座,2142-弧形轨道板,2143-焊板,2144-输送电机,2145-一对大小带轮,2146-滚筒,2147-传送带,221-移动框架,222-滚轮,223-导轨,224-可抽离底板,225-隔板若干,226-套筒,31-底板,32-自动升降杆,33-固定支架,34-移动滑块,35-四指机械爪,41-连通管,42-驱动水泵。
具体实施方式
30.为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
31.实施例:一种浮冰区海洋结构物性能水池实验装置,该装置的结构如图1和图2所
示,包括实验水池1、浮冰布放机构2、结构物固定机构3、造流机构4和造浪机构5,实验水池1首尾两端分别设置有进水口和出水口,浮冰布放机构2主要由浮冰运输机构21和浮冰下放机构22组成,浮冰运输机构21整体置于矩形实验水池1左端,根据实验研究需求离心转盘212通过输送机构持续快速向位于水池首端上方的浮冰下放机构22输送浮冰,且在浮冰数量满足要求时浮冰下放机构22及时下放以保证实验的稳定进行;结构物固定机构3同样安装在水池1另一端上方,可以通过左右两侧自动升降杆32来自由调整海洋结构物模型的吃水深度以及距离浮冰区的相对位置以探究海洋结构物所受载荷及运动响应;造流机构4通过连通管41连接水池首尾两端,通过驱动水泵42形成循环水流,与造浪机构5共同工作形成实验所需的浪流耦合环境。
32.如图3所示的是浮冰布放机构2的结构,包括浮冰运输机构21和浮冰下放机构22。所述浮冰运输机构主要包括移动托架211、离心转盘212、横向输送机构213和纵向输送机构214;移动托架211底部四个角隅处装有移动万向轮2111,可任意角度移动调整浮冰布放机构2的位置进而改变浮冰区的相对位置,并且万向轮2111的承重力较强在机构工作时起到一定程度缓冲减震的作用。
33.如图4所示的是浮冰布放机构2中离心转盘212的结构,包括输出电机2121、主动齿轮2122、从动齿轮2123、转轴2124、转盘2125、浮冰导向板2126和进口挡板2127,输出电机2121固定在移动托架211的顶面上,主动齿轮2122通过联轴器安装在电机输出轴上,安装于转盘底部转轴2124上的从动齿轮2123与其相啮合从而驱动转盘2125旋转;转盘2125外圈四周设有通过连接片固定在移动托架上方的圆形挡边条,挡边条的内径与转盘2125直径相同,高度远大于浮冰厚度,避免了堆积浮冰在转盘快速旋转时因离心力而飞离装置的危险;转盘上方设有对浮冰进行引导的内外弧形导向板2126,内外导向板同心且间距略大于单块浮冰直径,内侧导向板与挡边条内侧装有用于对超过预设高度的堆叠浮冰进行阻挡限制的限高进口挡板2127,挡板2127与转盘2125间的空隙略高于浮冰厚度,仅能允许单块浮冰通过以保证实验所需浮冰进行离心有序输送至横向输送机构213上。
34.如图5-6所示的是浮冰布放机构2中横向输送机构213的结构,包括两侧框架挡板2131、传动轴2132、传动齿轮2133、带轮2134、辊子2135和罩壳2136,两侧框架挡板2131之间等距排列有若干相同的传动轴2132,传动轴上的主动齿轮2133与辊子上的从动齿轮2133在罩壳内啮合传动,罩壳2136可进行横向移动调整辊子2135间间距,传动齿轮2133皆通过键连接的方式分别固定在传动轴2132与辊子2135两端;为了能够保证稳定传输,辊子2135间距在一般情况下应满足一个物体始终坚持在三个以上的辊子上,故可根据浮冰尺寸适当调节辊子间距,使之满足小于三分之一的浮冰直径;传动辊道中每隔两条辊2135子由一个单独的电动机带动,辊子上装有带轮通过皮带实现驱动;横向输送机构213靠近纵向输送机构214处向下有较小的倾斜角,浮冰在摩擦力作用下可以依次向前传送,不仅传动系统惯性小,起动制动容易,而且输送平稳,便于在输送过程中实现自动控制。
35.如图7所示的是浮冰布放机构2中纵向输送机构214的结构,包括机座2141、弧形轨道板2142、焊板2143、输送电机2144、一对大小带轮2145、滚筒2146和传送带2147,纵向输送机构214通过机座2141固定在移动托架211上,与横向输送机构213相互垂直且等高,两者连接处装有通过焊板2143固定在传输通道两侧弧形轨道板2142,内外侧轨道板能有效保证浮冰在指定范围内传送,大小带轮2145分别安装在电机输出轴和滚筒上,纵向输送机构的输
送电机2144与滚筒2146之间通过带传动2147连接驱动;所述纵向输送机构214能进一步缓和浮冰在运输过程中的载荷冲击且具有过载保护的作用,运行平稳,其输出口高度高于浮冰下放机构22。
36.如图8所示的是浮冰下放机构22的结构,包括移动框架221、滚轮222、导轨223、可抽离底板224、隔板若干225和套筒226,移动框架221底部装有四个大小相等的滚轮222,与实验水池1左右侧壁相配合,水平移动控制浮冰整体下放的区域;若干隔板225垂直于可抽离底板224,堆放在框架221一端,通过两侧套筒226安装在移动框架221左右两侧的导轨223上,作业时可根据浮冰尺寸来自由移动选择隔板225数量以及改变隔板间间距;底板224靠近输送机构一侧高度略高于远离输送机构一侧,可依据自身重力向另一侧滑动从而一列列输送浮冰直至所有列浮冰数量满足需求,则可快速抽离底板224使得浮冰落入实验水池1,在浪流耦合环境中随波浪发生运动;浮冰布放机构2设有浮冰监测设备,浮冰监测设备包括数据处理器、非接触式六自由度测量仪和粘贴在浮冰上的红外光球,红色光球通过泡沫双面胶粘贴在浮冰上方表面,当浮冰在浪流耦合作用下移动至监测区域处,非接触式六自由度测量仪迅速精准捕捉到这些红外光球并将所测得的数据及时传输至数据处理器中进而可以计算出浮冰的相对位移。
37.如图9-10所示的是结构物固定机构3的结构,包括底板31、自动升降杆32、固定支架33、移动滑块34和四指机械爪35,结构物固定机构3左右两侧底板31上均装有两根自动升降杆32,自动升降杆为可伸缩空心圆柱体杆,通过液压缸进行驱动,杆顶端连接有连接海洋结构物的固定支架33,固定支架33由两根平行滑轨构成,底面连接有四指机械爪35的移动滑块并可在导轨上滑动;当研究浪流环境下浮冰的运动、漂移状况时,升降杆32上升使得结构物脱离水面,固定于水池1上方;当需要研究结构物性能时则及时下放并且根据需要调整结构物相对位置以及吃水深度。海洋结构物模型采用四指机械爪35结构来固定,可适用于海洋平台、船体等多种结构模型,机械爪35顶部与移动滑块连接处装有旋转底座,能够根据需要调整结构物迎浪角角度;机械爪爪身以液压缸作为动力模块,动力模块与抓取部传动连接;抓取部主要由四组大小相等的驱动连杆和爪体铰接构成,爪体末端固接有防滑垫片,方便能够更稳更牢的抓住结构物;海洋结构物前端粘贴有应变片,当应变施加到应变片上时可及时将变化反映至专用应变测量仪中。
38.如图11所示的是造波机构4和造浪机构5空间分布示意图,造浪机构5主要置于实验水池1首端,依靠驱动部件推动在水池内循环往复的推板造成实验所需波浪;造流机构4的连通管41两端分别与实验水池首端的进水口和水池末端的出水口相连,通过水泵42形成稳定循环水流,共同模拟出实验所需环境以实现海洋结构物在浪-流-冰耦合作用下的研究。
39.如图12所示的是本实验装置的使用流程图,具体工作过程为:实验前期准备阶段,在水池1中注入实验用水直至实验所需的水位高度,接着放入浪高仪,打开造流机构4和造浪机构5使其开始工作,对水流及实验用波进行校验,从而进一步保证实验的准确性;校波工作完成后,取出水池中的浪高仪,将实验装置移至指定位置,确认好实验研究对象,若是研究浪流环境下浮冰的运动、漂移状况,则升起结构物固定机构3使得结构物脱离水面并移至水池上方一侧固定;若是研究浪-流-冰耦合环境下结构物性能时则降下结构物固定机构3并且根据需要调整结构物相对位置以及吃水深度;准备工作就绪,将实验所需数量的浮冰
放入浮冰布放机构2的离心转盘212上,经由输送机构21将其有序输送至下放机构22上,待所有列浮冰满足需求时抽离底板,浮冰落入水中随浪流发生运动。
40.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。