技术特征:
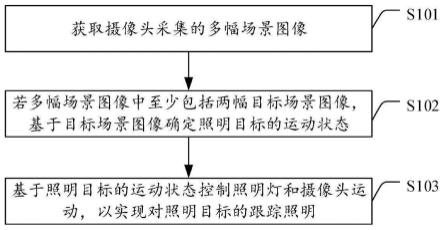
1.一种自动跟踪照明的方法,其特征在于,包括:获取摄像头采集的多幅场景图像;若所述多幅场景图像中至少包括两幅目标场景图像,基于所述目标场景图像确定照明目标的运动状态;其中,所述目标场景图像为包括所述照明目标的场景图像;基于所述照明目标的运动状态控制照明灯和所述摄像头运动,以实现对所述照明目标的跟踪照明。2.根据权利要求1所述的方法,其特征在于,还包括:若所述多幅场景图像中至多包括一副所述目标场景图像,基于预设模式控制所述摄像头运动,并返回所述获取摄像头采集的多幅场景图像步骤。3.根据权利要求1所述的方法,其特征在于,所述基于所述目标场景图像确定照明目标的运动状态,包括:若所述多幅场景图像均为所述目标场景图像,且目标图像在各所述目标场景图像中均处于预设位置,确定所述照明目标处于稳定状态;其中,所述目标图像为所述照明目标的图像,所述目标图像处于任一所述目标场景图像的预设位置时,所述照明灯照亮所述照明目标;若所述目标图像在至少一幅所述目标场景图像中未处于所述预设位置,确定所述照明目标处于调整状态;以及,基于所述目标场景图像确定所述照明目标的调整方向和调整速度。4.根据权利要求3所述的方法,其特征在于,所述基于所述照明目标的运动状态控制照明灯和所述摄像头运动,包括:若所述照明目标处于稳定状态,则控制所述摄像头维持当前的运动状态;若所述照明目标处于调整状态,基于所述照明目标的调整方向和调整速度调整所述摄像头的运动状态。5.根据权利要求3所述的方法,其特征在于,通过如下步骤确定所述目标图像是否处于目标场景图像中的预设位置:将所述目标场景图像输入到预先构建的目标识别模型中,确定所述目标场景图像的识别结果;其中,所述识别结果包括:所述目标图像处于所述预设位置,或者,所述目标图像未处于所述预设位置。6.根据权利要求1所述的方法,其特征在于,所述基于所述照明目标的运动状态控制照明灯和所述摄像头运动,包括:基于所述照明目标的运动状态控制所述照明灯和所述摄像头同步运动;或者,基于所述照明目标的运动状态控制所述照明灯跟随所述摄像头的运动轨迹运动。7.一种自动跟踪照明的装置,其特征在于,包括:获取模块,用于获取摄像头采集的多幅场景图像;确定模块,用于若所述多幅场景图像中至少包括两幅目标场景图像,基于所述目标场景图像确定照明目标的运动状态;其中,所述目标场景图像为包括所述照明目标的场景图像;
运动模块,用于基于所述照明目标的运动状态控制照明灯和所述摄像头运动,以实现对所述照明目标的跟踪照明。8.一种控制器,包括存储器、处理器以及存储在所述存储器上被所述处理器执行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6中任一项所述的自动跟踪照明的方法的步骤。9.一种自动跟踪照明的系统,其特征在于,包括:摄像头、照明灯、光敏开关,以及,权利要求8所述的控制器;所述控制器分别和所述摄像头以及所述照明灯相连;所述摄像头、照明灯和控制器,均通过所述光敏开关与电源模块相连。10.一种起重机,其特征在于,设置有所述权利要求9所述的自动跟踪照明的系统。
技术总结
本申请提供一种自动跟踪照明的方法、装置、控制器、系统及起重机,应用于跟踪照明领域,该方法包括获取摄像头采集的多幅场景图像,若多幅场景图像中至少包括两幅目标场景图像,基于目标场景图像确定照明目标的运动状态,其中,目标场景图像为包括照明目标的场景图像,基于照明目标的运动状态控制照明灯和摄像头运动,以实现对照明目标的跟踪照明。将本方案应用于起重机中,照明灯能够自动跟踪吊载物并进行照明,不需要操作手进行分神控制,有效提高夜间起重机操作的安全性。效提高夜间起重机操作的安全性。效提高夜间起重机操作的安全性。
技术研发人员:刘欣欣 谢志强 郝子新
受保护的技术使用者:湖南三一中型起重机械有限公司
技术研发日:2022.04.26
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。