1.本发明涉及医疗器械技术领域,尤其涉及一种椎间融合器的制备方法。
背景技术:
2.脊柱椎间融合术是目前脊柱外科最常见的脊柱融合技术。该技术在切除病变节段的椎间盘后,通过在椎间隙内植入椎间融合器提供支撑,同时促进椎间隙的上下终板间形成植骨融合结构,将上下方的椎体稳固的连接在一起,实现融合。
3.目前人口老龄化形势严峻,超过50%的脊柱融合术患者同时合并有骨质疏松症。骨质疏松患者的骨密度和骨弹性模量明显低于骨代谢正常的患者。然而,传统椎间融合器都是参考骨代谢正常的患者进行设计,当将其应用于骨质疏松患者时就会出现融合器的生物力学特性与患者骨质的生物力学特性不匹配的情况,进而导致应力遮挡、局部应力过大、融合器嵌入终板骨质、融合器下沉移位等问题,严重时甚至需要二次手术翻修。
技术实现要素:
4.鉴于上述的分析,本发明实施例旨在提供一种椎间融合器的制备方法,用以解决现有椎间融合器与不同骨质量的椎体终板在生物力学上不匹配,容易导致终板塌陷,椎间融合器下沉的问题。
5.本发明提供了一种椎间融合器的制备方法,步骤包括:
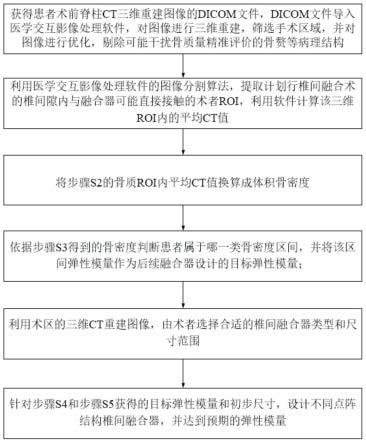
6.步骤s1:获得患者术前脊柱ct三维重建图像文件,对图像进行三维重建,筛选手术区域,并对图像进行优化,剔除干扰骨质量精准评价的病理结构;
7.步骤s2:提取计划行椎间融合术的椎间隙内与椎间融合器可能直接接触的术者roi,计算该roi内的平均ct值;
8.步骤s3:将步骤s2的平均ct值换算成体积骨密度;
9.步骤s4:依据步骤s3得到的体积骨密度判断患者所属骨密度区间,并将该区间弹性模量作为后续椎间融合器设计的目标弹性模量;
10.步骤s5:利用术区的三维ct重建图像,由术者选择合适的椎间融合器类型和尺寸范围;
11.步骤s6:根据步骤s4和步骤s5获得的目标弹性模量和初步尺寸,设计不同点阵结构椎间融合器,并达到预期的弹性模量。
12.进一步地,所述步骤s3中,平均ct值换算成体积骨密度前需要校准公式。
13.进一步地,所述步骤s4中,终板骨密度阈值具体为:骨量正常的椎体终板骨密度》400mg/cc;200mg/cc<骨量减少的椎体终板骨密度≤400mg/cc;骨质疏松椎体终板骨密度≤200mg/cc。
14.进一步地,所述步骤s4中,终板弹性模量阈值具体为:骨量正常终板的局部模量》3gpa;1ga<骨量减少终板的局部模量≤3gpa;骨质疏松终板的局部模量≤1gpa。
15.进一步地,所述步骤s6中,当骨量正常椎体终板局部模量》3gpa时,椎间融合器采
用第一点阵结构;当1ga<骨量减少椎体终板局部模量≤3gpa时,椎间融合器采用第二点阵结构;当骨质疏松椎体终板局部模量≤1gpa时,椎间融合器采用第三点阵结构。
16.进一步地,所述步骤s6中,由第一点阵结构形成的椎间融合器的弹性模量为x,3gpa≤x≤20gpa;由第二点阵结构形成的椎间融合器的弹性模量为x,1gpa≤x≤3gpa;由第三点阵结构形成的椎间融合器的弹性模量为x,x≤1gpa。
17.进一步地,其特征在于,所述椎间融合器包括多孔结构单元,所述多孔结构单元由点阵结构形成。
18.进一步地,所述点阵结构为第一点阵结构,所述第一点阵结构包括4个第一杆件,4个所述第一杆件的一端连接在一起形成第一节点,另一端以所述第一节点为中心向外辐射均布。
19.进一步地,所述点阵结构为第二点阵结构,所述第二点阵结构包括6个第二杆件,6个所述第二杆件的一端连接在一起形成第二节点,另一端以所述第二节点为中心向一侧辐射均布。
20.进一步地,所述点阵结构为第三点阵结构,所述第三点阵结构包第三杆件,所述第三杆件为弧形杆,相邻两所述第三杆件的首尾连接后并成列排布,多列形成一层簧形结构。
21.与现有技术相比,本发明至少可实现如下有益效果之一:
22.(1)本发明直接测量老年患者椎间融合手术区域的ct值,从而可以获知该老年患者群体的术区骨质条件信息,以此为参考设计椎间融合器,与传统骨密度测量方法比,提高了骨密度评估准确性和与椎间融合术的相关性。
23.(2)本发明通过设计不同的点阵结构单元,调控椎间融合器在受力时其应力应变曲线,实现了多孔结构钛合金椎间融合器的弹性模量与骨质匹配,达到植入后假体与骨组织的生物力学匹配。
24.(3)本发明以患者的脊柱骨性终板ct值为参考,获得以ct值换算得到的骨密度和对应弹性模量参数信息,随后个性化定制与患者骨质弹性模量匹配的椎间融合器假体,植入后能够有效解决目前椎间融合器的弹性模量与患者骨质模量不匹配的问题。
25.(4)本发明的不同点阵结构,能够实现多孔椎间融合器弹性模量的调控,改变了以往3d打印椎间融合器弹性模量,能够解决以往单一弹性模量的椎间融合器产品无法匹配不同骨质密度的问题,能够为不同年龄和不同骨质状态匹配特定的椎间融合器假体,从而减少椎体终板塌陷,提高假体的安全性和有效性。
26.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
27.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
28.图1为具体实施例的椎间融合器的制备流程图;
29.图2为具体实施例的4个第一点阵结构连接示意图;
30.图3为具体实施例的第一点阵结构的节点受载示意图;
31.图4为具体实施例的包括第一点阵结构的椎间融合器示意图;
32.图5为具体实施例的2个第二点阵结构连接示意图;
33.图6为具体实施例的第二点阵结构的节点受载示意图;
34.图7为具体实施例的包括第二点阵结构的椎间融合器示意图;
35.图8为具体实施例的第三点阵结构连接示意图;
36.图9为具体实施例的第三点阵结构的节点受载示意图;
37.图10为具体实施例的包括第三点阵结构的椎间融合器示意图。
38.附图标记:
39.1-第一点阵结构;11-第一杆件;2-第二点阵结构;21-第二杆件;3-第三点阵结构;31-第三杆件;4-第一实体部分;5-第一微孔;6-第一光滑表面;7-第一夹持槽;8-第二实体部分;9-第三实体部分。
具体实施方式
40.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
41.本发明的一个具体实施例,如图1-图10所示,公开了一种椎间融合器的制备方法,步骤包括:
42.步骤s1:获得患者术前脊柱ct三维重建图像的dicom(digital imaging and communications in medicine,医学数字成像和通信)文件。dicom文件导入医学交互影像处理软件,对图像进行三维重建,筛选手术区域,并对图像进行优化,剔除可能干扰骨质量精准评价的骨赘等病理结构。
43.ct(computed tomography,电子计算机断层扫描)值是一种评价骨密度的有效工具,单位是hu(hounsfield unit,亨氏单位)。临床常规的骨密度测量方法只能测量患者的整体骨密度情况,无法精准评价手术区域的局部骨密度。然而,ct值法可以在患者的脊柱薄层三维重建影像中,选择与融合器直接接触的骨性终板区域,从而精准获得与融合器下沉等风险相关性最大的局部ct值。另一方面,ct值与体积骨密度高度相关,可以将ct值转化为骨密度数据。
44.步骤s2:利用医学交互影像处理软件的图像分割算法,提取计划行椎间融合术的椎间隙内与融合器可能直接接触的术者roi(region of interest,感兴趣区域),示例性地,椎体终板,利用软件计算该三维roi内的平均ct值。
45.步骤s3:将步骤s2的骨质roi内平均ct值换算成体积骨密度,公式为ρ=0.733*ct值 4.51,单位mg/cc。考虑到ct扫描参数差异等因素导致的系统误差,该公式在使用时需要校准。校准方法可以使用与患者同步扫描的已知密度的羟磷灰石体模,也可以同步测量与s2中测量区域同一轴位水平的椎旁肌和皮下脂肪平均ct值。以椎旁肌和皮下脂肪的ct值作为内参校准。
46.步骤s4:依据步骤s3得到的骨密度决定患者属于哪一类骨密度区间,并将该区间弹性模量作为后续融合器设计的目标弹性模量。
47.本实施例提出了骨性终板骨密度高低的分层标准,并进一步将骨密度数据转化为
弹性模量数据,以此为参考,设计生物力学匹配的融合器。
48.以骨量正常、骨量减少、骨质疏松终板的骨密度和弹性模量阈值分类,终板骨密度阈值具体为:
49.1)骨量正常的椎体终板骨密度》400mg/cc;
50.2)200mg/cc<骨量减少的椎体终板骨密度≤400mg/cc;
51.3)骨质疏松椎体终板骨密度≤200mg/cc。
52.终板弹性模量阈值具体为:
53.1)骨量正常终板的局部模量》3gpa;
54.2)1ga<骨量减少终板的局部模量≤3gpa;
55.3)骨质疏松终板的局部模量≤1gpa。
56.需要说明的是,ct值受ct机器型号、ct扫描参数等因素影响,不能直接作为参考指标。可以将患者的ct值换算得到骨密度数据,从而决定患者属于三类区间中的一种(骨质疏松、骨量减少或骨量正常),进而以该区间对应的弹性模量为参考设计椎间融合器。
57.步骤s5:利用术区的三维ct重建图像,由术者选择合适的椎间融合器类型和尺寸范围。如根据手术部位位于颈椎、胸椎或腰椎选择不同类型的融合器外形特点和尺寸范围。
58.步骤s6:针对步骤s4和步骤s5获得的目标弹性模量和初步尺寸,设计不同点阵结构椎间融合器,并达到预期的弹性模量。
59.参见图2-图10,椎间融合器包括多孔结构单元,多孔结构单元由点阵结构形成,点阵结构具体分为第一点阵结构1、第二点阵结构2和第三点阵结构3。
60.第一点阵结构1包括4个第一杆件11,4个第一杆件11的一端连接在一起形成第一节点,另一端以第一节点为中心向外辐射均布,第一杆件11与节点所在平面(连接在同一个节点上的4个第一杆件11中的3个第一杆件11的另一端形成的平面)的夹角为30
°
。每4个第一杆件11构成一个最小的第一点阵结构单元,相邻最小的第一点阵结构单元以第一杆件11的另一端(即未形成第一节点的一端)相互连接,4个相邻最小的第一点阵结构单元以第一点阵结构1的第一杆件11的连接形式进行连接。
61.本实施例中,第一点阵结构1呈4杆空间均匀分布形态,每4杆构成一个最小单元,单元杆件丝径相对于节点平面呈30
°
夹角,节点受载沿节点所在平面自上而下,分载荷沿杆件传递至下一节点,结合一定的孔隙率(50%~90%),制备出对应椎间融合器。
62.由第一点阵结构11形成的椎间融合器由增材制造技术制造而成,多孔部分(即多孔结构单元)与第一实体部分4一体成型。多孔结构周期性排布,第一实体部分4分布在融合器边缘或根据术式确定,第一实体部分4可以留有第一微孔5(即贯穿孔),有利于血液流动,便于营养物质的传输,同时有利于减轻假体重量。
63.根据椎间融合器的植入术式需要,植入时先进入体内的部分为第一光滑表面6,第一光滑表面6有利于产品顺利的植入,因此该部分表面光滑,相对应部位设计成第一夹持槽7,利于持器的夹持,同时有利于打入时,增大摩擦。
64.第二点阵结构2包括6个第二杆件21,6个第二杆件21的一端连接在一起形成第二节点,另一端以第二节点为中心向一侧辐射均布,第二杆件21与节点所在平面(连接在同一个节点上的6个第二杆件21的另一端形成的平面)的夹角为40
°
。每6个第二杆件21构成一个最小的第二点阵结构单元,相连两个最小的第二点阵结构单元的第二节点重合,即12个第
二杆件21的一端连接在一起。
65.本实施例中,第二点阵结构呈6杆空间爪状分布形态,每6个杆件构成一个最小单元,单元杆件丝径相对于节点平面呈40
°
夹角,节点受载沿节点所在平面自上而下,分载荷沿杆件传递至下一节点,结合一定的孔隙率(50%~90%),制备出对应椎间融合器。
66.由第二点阵结构形成的椎间融合器由增材制造技术制造而成,多孔部分(即多孔结构单元)与第二实体部分8一体成型。多孔结构周期性排布,第二实体部分8分布在融合器边缘或根据术式确定,第二实体部分8可留有第二微孔(图中未示出),有利于减轻假体重量,也利于体液和营养物质传输。
67.第三点阵结构3包第三杆件31,第三杆件31为弧形杆,相邻两第三杆件31的首尾连接后并成列排布,多列形成一层簧形结构,每层簧形结构构成一个最小的单元,多层簧形结构上下等间距排布。
68.本实施例中,第三点阵结构3呈平面簧状分布形态,每层簧形结构构成一个最小单元,节面受载为均布载荷,载荷分布自上而下,分载荷沿簧形结构传递至下一节面,结合一定的孔隙率(50%~90%),制备出对应椎间融合器。
69.由第三点阵结构3形成的椎间融合器由增材制造技术制造而成,多孔部分与第三实体部分9一体成型。多孔结构周期性排布。受力时,簧形结构可以通过微变形用于调控受力。第三实体部分9分布在融合器边缘或根据术式确定。
70.根据椎间融合器的植入术式需要,植入时先进入体内的部分为第二光滑表面,第二光滑表面有利于产品顺利的植入,因此该部分表面光滑,相对应部位设计成第二夹持槽(图中未示出),利于持器的夹持,同时有利于打入时增大摩擦。
71.需要说明的是,图3、图6和图9中的字母a、b、c、d、e和f均表示节点,p为总载荷,p1和p2均为分载荷,q为均布载荷,l为距离。
72.本实施例中,点阵结构一般是指由结构中的杆(丝)、节点等微单元按一定的规则重复排列构成的空间桁架,具有体密度小、比表面积大、比力学性能高等特点。钛合金的弹性模量虽然超过100gpa,但是通过多孔的点阵结构设计,可以调控多孔钛合金的弹性模量。利用增材制造在设计与打印点阵结构方面具有独特的优势,能够实现精准的丝径、孔隙率、孔径形状、孔径大小、孔分布以及相互之间连通性。
73.本发明通过设计不同的点阵结构,调控椎间融合器在受力时其应力应变曲线,最终实现多孔结构钛合金椎间融合器的弹性模量与骨质匹配。在点阵结构的设计上,单元结构的大小和密度以及单元结构方向,都会影响点阵结构的力学性能,单元结构的大小和密度是指单个结构单元的大小以及在一个空间内单元的数量。通常情况下,点阵结构会默认为不需要支撑,一方面需要注意设计过程中的椎间融合器的强度要求,如丝径大小、丝径的倾斜角度等等;另一方面也需要考虑单元结构的连接角度,最终实现设计的弹性模量需求。
74.当骨量正常椎体终板局部模量》3gpa时,采用第一点阵结构1,由第一点阵结构1形成的椎间融合器的弹性模量为x,3gpa≤x≤20gpa。当1ga<骨量减少椎体终板局部模量≤3gpa时,采用第二点阵结构2,由第二点阵结构2形成的椎间融合器的弹性模量为x,1gpa≤x≤3gpa。当骨质疏松椎体终板局部模量≤1gpa时,采用第三点阵结构3,由第三点阵结构3形成的椎间融合器的弹性模量为x,x≤1gpa。
75.已有椎间融合器设计时参考的是正常青年患者的骨质条件,导致此类椎间融合器
应用于骨质条件差的老年患者时,融合器偏“硬”,也即模量过大,容易损伤终板。本发明则直接测量老年患者的ct值,从而可以获知该老年患者群体的骨质条件信息,以此为参考设计椎间融合器。
76.已有椎间融合器设计时参考的患者骨密度是以双能x线吸收法测量得到的,以t值衡量,t值小于等于-2.5被认为是骨质疏松。t值法应用于老年患者时,会将老年患者的骨赘等异常病理结构也当作正常骨结构,计入骨量,从而导致骨密度被高估,也就无法准确评估骨质量。本发明采用ct值法可以避开这些异常区域,只测量真正的正常松质骨区域,提高了骨密度评估准确性。
77.以往的骨质量评价往往是评估一个人整体的骨质量水平,而不是局部骨质量。然而,人体的骨质量在不同部位是不均一的,整体骨质量的好坏无法准确衡量具体局部区域的骨质量好坏。本发明则采用直接测量椎体终板ct值的方法评价局部骨质量,避免了上述整体骨密度评价的不足。
78.在植入椎间融合器的融合术中,椎体骨性终板是与椎间融合器直接接触的骨质,骨性终板的骨质量条件直接决定了椎间融合器植入能否成功。以往骨密度评价方案能够测量的最小结构单元是椎体,以椎体骨密度代表脊柱整体骨密度,而无法测量椎体亚结构的密度。椎体终板就是椎体亚结构之一,本发明直接测量手术区域的终板骨密度,比以往的方案更精准,与手术的相关性更大。
79.本发明能够解决以往单一弹性模量的椎间融合器产品匹配所有骨质密度的问题,能够为不同年龄和不同骨质状态匹配特定的椎间融合器假体,从而减少椎体终板塌陷,提高假体的安全性和有效性。
80.本发明设计不同点阵结构,能够实现多孔椎间融合器弹性模量的调控,改变了以往3d打印椎间融合器弹性模量。
81.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。