1.本发明属于康复训练、运动学习领域,具体涉及基于肌肉协同和变刚度阻抗控制的手腕部康复训练系统。
背景技术:
2.脑卒中是一种急性的脑血管疾病,是由于脑部血管突然破裂或者血管阻塞,而导致血液不能流入大脑,从而引起脑组织损伤的一种疾病。《中国脑卒中防治报告2019》概要指出卒中是严重危害中国国民健康的重大慢性疾病。脑卒中的发病率高、致残率高,其中70%-80%的患者会出现偏瘫的症状,使得患者失去独立日常生活活动的能力,严重影响了患者的生活水平,还可能引发各种生理上和心理上的疾病,甚至会危及生命。并且随着人口老龄化和城市化的进程不断加速,以及居民不健康的生活方式,使得脑卒中的患病率不断提高,给家庭和社会带来了严重的负担。
3.目前,人体中枢神经系统的可塑性已经得到了验证,通过科学有规律的康复训练能够帮助患者改善受损功能以及恢复患者肢体的功能。对于脑卒中患者运动功能恢复通常需要专业的医护人员长时间的引导、帮助来完成康复训练。但由于患者数量和医护人员的数量严重失衡,有大量的患者无法得到及时的康复训练,影响患者恢复的效果和时机。并且传统康复训练方法主要由医护人员人工或者借助简单的机械带动患者肢体进行治疗,很难保证训练的强度和时间。近年来,传感器技术、人机接口技术、虚拟现实技术以及机器人技术的迅速发展,弥补了传统的康复训练的不足,可以以更加精确,更加智能的方法进行康复训练。外骨骼设备以及机器人将人体的运动信号(位置信号、力信号、力位混合信号)或者生理信号(肌电信号、脑电信号、眼电信号)作为交互信息,通过各种控制算法,对患者肢体进行康复训练。其记录训练过程中的相关信息,可供专业治疗师分析,以及时的调整康复训练的方法。
4.表面肌电信号作为神经中枢控制肌肉收缩产生的生物电信号,由于其包含的动作信息超前于人体相应动作,能够更好的体现人体动作意图,所以经常被用作各种康复训练系统的交互信号。神经肌肉协同控制理论解释了从中枢神经到肌肉的过程,由中枢神经系统系统产生少量的信号,这些信号通过网络将其分配给对应的肌肉,肌肉进行收缩产生力,从而带动肢体的运动。因此在训练康复中使用肌肉协同作用将肌电信号转化为运动信号。
5.手作为人体最为灵活的部位,对人们的日常生活影响最大,也是最容易受伤的部位。在脑卒中患者中,大多数病人都会出现手部肌力异常症状和手部功能障碍。对于患者手部功能的恢复极为重要,手部的康复训练需求多样,康复难度较高。目前多采用被动式的康复训练,通过机器人带动患者完成预设的轨迹,无法发挥患者自生的主动性和积极性。此外,大多数的康复训练只注重于患者手部腕部动作的恢复,而没有关注手部肌肉力量的恢复。在与物理环境交互时,需要有效的改变肌力大小,从而提高与环境交互时的稳定性和准确性。
技术实现要素:
6.为解决上述问题,本发明公开了基于肌肉协同和变刚度阻抗控制的手腕部康复训练系统,从表面肌电信号中提取出关节角度和刚度信息,运用到康复训练游戏中,使得被试可以完成训练游戏,从而达到对手腕部的康复训练效果。
7.为达到上述目的,本发明的技术方案如下:
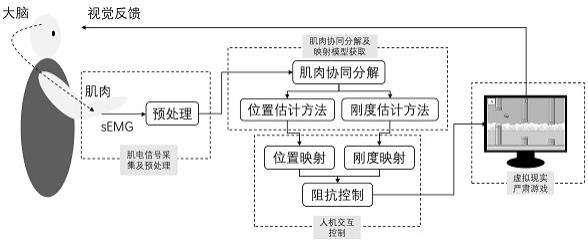
8.基于肌肉协同和变刚度阻抗控制的手腕部康复训练系统,包括:
9.肌电信号采集及预处理模块,通过表面肌电信号传感器采集运动时的表面肌电信号,并且进行滤波等预处理;
10.肌肉协同分解及映射模型获取模块,通过肌肉协同分解方法和回归网络模型建立表面肌电信号和关节角度映射模型以及表面肌电信号和人体刚度映射模型;
11.人机交互控制模块,通过阻抗控制的方法对虚拟环境中的代理进行控制,所述的阻抗控制中的刚度随人体手臂的刚度变化;
12.虚拟现实严肃游戏模块,生成适合用户康复训练严肃游戏难度以及虚拟干扰,并提供视觉反馈。
13.进一步,肌电信号采集及预处理模块,包括:
14.表面肌电信号的采集,使用delsys采集人体桡侧腕屈肌、桡侧腕伸肌、尺侧腕屈肌、尺侧腕伸肌、指屈肌、指伸肌的表面肌电信号;
15.表面肌电信号的预处理,所述的处理方式包括全波整流、低通滤波、归一化、神经激活模型提取和肌肉激活模型提取六个步骤。
16.进一步,肌肉协同分解及映射模型获取模块,包括:
17.肌肉协同分解,将预处理后的信号通过非负矩阵分解的方法,得到其空域协同和空域协同;非负矩阵分解方法如下:
18.z(t)=w
·
c(t)
19.其中z(t)为预处理后的表面肌电信号,w为空域协同,c(t)为空域协同。非负矩阵分解方法中所有的元素都为非负值。
20.获取关节角度映射模型,使用时域协同数据和运动标签数据对多层感知模型进行训练,得到关节角度映射模型:
21.x(t)=mlp(w
·
z(t))
22.其中x(t)为关节角度,w
为时域协同的逆矩阵,z(t)为预处理后的表面肌电信号,mlp(
·
)为训练完成的多层感知模型。
23.获取人体刚度映射模型,利用协同效应模型为将预处理后的表面肌电信号投影到不同自由度不同方向上的协同,在这些协同即为每个方向肌肉收缩的贡献,再由共收缩原理得到表面肌电信号到人体刚度的模型:
24.ki(t)=min(w
i t
·
z(t),w
i-t
·
z(t))
25.其中ki(t)为每个自由度上的刚度值,w
i t
,w
i-t
为该自由度两个方向上的协同效应系数矩阵,z(t)为预处理后的表面肌电信号。
26.进一步,人机交互控制模块,使用变刚度阻抗控制的方法对虚拟环境中的代理进行控制,所述的虚拟阻抗控制为阻尼-弹簧-质量系统,其该系统的表述方法为:
27.1的范围内,接着通过神经激活模型获取神经激活度,最后通过肌肉激活模型获取肌肉激活度。
42.(2)确定表面肌电信号与关节角度关系模型
43.根据肌肉协同分解原理,通过非负矩阵分解的方法对预处理后的肌电信号进行分解。分别将手腕屈伸、手指屈伸时的信号进行肌肉协同分解。
44.z
wf
(t)=w
wf
·cwf
(t)
45.z
we
(t)=w
we
·cwe
(t)
46.z
ff
(t)=w
ff
·cff
(t)
47.z
fe
(t)=w
fe
·cfe
(t)
48.其中z
wf
(t),z
we
(t),z
ff
(t),z
fe
(t)分别为手腕弯曲,手腕伸展,手指弯曲,手指伸展时的肌电信号,w
wf
,w
we
,w
ff
,w
fe
分别为手腕弯曲,手腕伸展,手指弯曲,手指伸展对应的空域协同,c
wf
(t),c
we
(t),c
ff
(t),c
fe
(t)分别为手腕弯曲,手腕伸展,手指弯曲,手指伸展对应的时域协同。将获取的空域协同按列组合就可得到整体空域协同:
49.w=[w
wf
,w
we
,w
ff
,w
fe
]
[0050]
用获取的时与协同以及标签数据对多层感知模型回归网络进行训练,即可获得从肌电信号到关节角度关系模型:
[0051]
x(t)=mlp(w
·
z(t))
[0052]
其中x(t)为关节角度,w
为时域协同的逆矩阵,z(t)为预处理后的表面肌电信号,mlp(
·
)为训练完成的多层感知模型。
[0053]
(3)确定表面肌电信号与人体刚度模型
[0054]
根据协同效应模型将预处理后的表面肌电信号投影到不同自由度不同方向上的协同,在这些协同即为每个方向肌肉收缩的贡献,其具体投影方式与(2)中肌肉协同分解方式相同。再由共收缩原理得到表面肌电信号到人体刚度的模型:
[0055]kw
(t)=min(w
wft
·
z(t),w
wet
·
z(t))
[0056]
kf(t)=min(w
fft
·
z(t),w
fet
·
z(t))
[0057]
其中kw(t),kf(t)分别为手腕屈伸方向上的刚度和手指屈伸方向上的刚度,w
wft
,w
wet
,w
fft
,w
fet
为分别为手腕弯曲,手腕伸展,手指弯曲方向上的协同效应系数矩阵,z(t)为预处理后的表面肌电信号。
[0058]
(4)初始化任务控制场景,并设置任务复杂度
[0059]
为了提高被试参与康复训练的积极性,采用不同的训练游戏场景,使用flying bird和captain rogers两个游戏,通过增减游戏中的障碍物的数量来改变游戏的复杂度。
[0060]
(5)进行康复训练
[0061]
通过大量长时间的训练使得被试得到有效的康复。在控制中采用虚拟阻抗的控制方法:
[0062][0063]
其中m为物体质量,b阻尼系数,k为弹簧(刚度)系数,x(t),分别为当前位置,当前速度,当前加速度,f
ext
为额外干扰力。将表面肌电信号与关节角度关系模型得到的关节角度通过投影变换的方法,映射为训练游戏的控制目标的坐标。将表面肌电信号与
人体刚度模型得到的人体刚度作为虚拟阻抗控制方法的弹簧(刚度)系数。被试需要控制实际输出的目标完成相关的任务。
[0064]
(6)根据游戏表现,调节任务场景以及任务复杂度
[0065]
在进行康复训练时会记录被试每次完成任务的时间以及得分。在每一轮训练结束后,根据其表现调整游戏任务场景以及任务复杂度。当完成游戏时间变短或者得分变高时,增加游戏难度,反之减小游戏难度。
[0066]
需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。