1.本发明涉及一种柔性手爪,属于软体机器人领域,具体为利用低沸点液体的气液两相变化致使腔体内部压力变化从而引发夹爪动作的一种两相驱动柔性手爪。
背景技术:
2.现有在工业生产和生活中,主要的手爪材料和结构为刚性较强,硬度大,不易变形材料,在抓取过程中,因为刚性材料不能变形,其接触面积会受到变形能力限制,导致接触面积小,应力大,对抓取物表面造成破坏,为克服这一缺陷,主要解决手段为在夹爪接触面贴附柔性物质如橡胶等,产生部分形变能力,增加抓取面积和摩擦力,但是此种方法治标不治本。柔性手爪的出现从本质上克服了刚性手爪的天然缺陷,其依靠自身材料本身和新型结构,使自身变形能力大大增加,增加了夹取物品时的接触面积,减小了对物体的应力,同时控制大大简化,为夹取易碎易变形的物品提供了极大便利。
3.目前柔性手爪大多采用气动,需要连接气泵等大型设备,成本较高,噪音较大。因此急需一种新型驱动方式驱动柔性手爪,简化当前的结构及驱动方式以此来降低市面上柔性手爪的成本。
技术实现要素:
4.本发明的目的是为了解决上述现有技术的不足而提一种两相驱动柔性手爪,其解决了现有技术中柔性手爪需要采用气动夹紧而导致成本高、噪音大的问题。
5.本发明通过将低沸点液体hfe7000封装在密封手爪内,通过加热使该低沸点液体气化造成手爪内压强变化来改变手爪弯曲角度从而抓取物品,避免了原有气动及液压柔性手爪结构复杂庞大、成本高的缺点,同时采用将手爪抽真空再灌入低沸点溶液的方式,使其初始状态处于负压的状态,使其弯曲范围和传统气动手爪类似。采用螺旋弯曲的金属丝直接加热被封装的低沸点液体,可以在短时间内使液体气化从而使手爪弯曲,室温下停止加热后该液体能在几秒内重新变回液体,手爪可迅速回到初始状态。另外,不同的加热温度可以提供不同的抓取力。
6.为了实现上述目的,本发明所设计的一种两相驱动柔性手爪,包括夹爪底座、封口装置、气管和中空的柔性夹爪,所述夹爪底座的下方设置有一个以上的所述柔性夹爪,每一个柔性夹爪的上方通过一个驱动塞与所述气管的下端口连通,在每一根气管的上端口连接有一个所述的封口装置,所述驱动塞的下方连接有插入到柔性夹爪中空内的加热丝,所述驱动塞上设置有将柔性夹爪的中空部与气管连通的输送孔,在所述的柔性夹爪内填充有型号为hfe7000的低沸点液体。
7.作为优选,为了当不需要往柔性夹爪内部加入低沸点液体时,将气管上端头部进行密封设置,所述封口装置包括气管封闭内丝堵头和气管快插接头,所述气管封闭内丝堵头的下端插入到气管内,在所述气管封闭内丝堵头的下方套有密封圈,所述气管快插接头与所述的气管封闭内丝堵头螺纹连接。
8.作为优选,为了能够进一步提高连接的密封性,所述驱动塞上设置有位于输送孔上方的塔型气管接口、一个以上的第一螺栓固定孔以及两个加热丝通孔,所述塔型气管接口与输送孔连通,所述驱动塞的底部设置有长加热丝固定柱和短加热丝固定柱,在所述的夹爪底座上设置有与柔性夹爪一一对应的安装通孔,所述塔型气管接口伸出安装通孔后与气管连接,在所述的夹爪底座上还设置有与第一螺栓固定孔一一对应的第二螺栓固定孔,第一螺栓固定孔和第二螺栓固定孔对齐后通过螺栓固定,所述驱动塞下方为上粗下细的圆台部。
9.作为优选,为了能够进一步提高加热效率,所述的加热丝为一整条金属丝,其包含长加热丝输出脚和短加热丝输出脚、电源连接端以及加热段,所述长加热丝输出脚和短加热丝输出脚上均设置有一根所述的电源连接端,所述的加热段按次序缠绕在所述的长加热丝固定柱和短加热丝固定柱上。
10.作为优选,为了方便操作,所述柔性夹爪包括连接接口、棱柱齿型外壳、腔体薄膜和仿生壁虎脚,所述棱柱齿型外壳上方设置有所述的连接接口,所述连接接口套在圆台部上并通过密封胶密封连接,所述棱柱齿型外壳上方为中空腔体,在棱柱齿型外壳的中空腔体内设置有腔体薄膜,所述棱柱齿型外壳的一侧设置有一个以上的齿轮部,在所述棱柱齿型外壳的另一侧设置有一个以上的仿生壁虎脚,所有棱柱齿型外壳上的齿轮部朝外设置,多个柔性夹爪环形设置在所述夹爪底座的下方,所有棱柱齿型外壳上的齿轮部朝夹爪底座中心轴外侧设置,所有棱柱齿型外壳上的仿生壁虎脚朝向夹爪底座中心轴设置构成夹口。
11.进一步,为了提高加热效率,所述的长加热丝固定柱为两根,所述的短加热丝固定柱为两根,且所述长加热丝固定柱位于短加热丝固定柱的内侧并靠近所述夹爪底座中心轴。
12.为了方便布线,在所述的驱动塞上设置有用于过电线的电路通道。
13.为了实现自动化操作,还包括控制单元,所述控制单元包括上盖、控制板、铜柱、电池盒和电池支架,所述控制板通过螺丝固定在所述的上盖上,所有长加热丝输出脚上的电源连接端相互连接有与所述控制板的gng端连接,每一根短加热丝输出脚上的电源连接端分别连接控制板上的不同控制端口,所述上盖通过一根以上的铜柱与所述的电池支架固定连接,所述电池盒固定在所述的电池支架对应的安装孔内,所述的夹爪底座与电池支架固定连接,且所述的气管快插接头伸出所述上盖上的第二通孔。
14.作为优选,为了增加手指导热性能,从而加速冷却过程,所述棱柱齿型外壳采用d打印而成的,且所述棱柱齿型外壳的材质中添加有氧化石墨烯和金纳米颗粒,所述气管为pu材质。
15.为了防止内部加热后烫伤所述棱柱齿型外壳的材料,在所述的加热段外套有一个以上间隔设置的隔热球。
16.与现有技术相比较,本发明得到的一种两相驱动柔性手爪,将低沸点液体封装在密封的柔性手爪内,通过加热使该低沸点液体气化造成手爪内压强变化来改变手爪弯曲角度从而抓取物品,避免了原有气动及液压驱动柔性手爪结构复杂庞大、成本高的缺点,同时采用将手爪抽真空再灌入低沸点溶液的方式,使其初始状态处于负压的状态,使其弯曲范围和传统气动手爪类似;采用螺旋弯曲的金属丝直接加热被封装的低沸点液体,可以在短时间内使液体气化从而使手爪弯曲,室温下停止加热后该液体能在几秒内重新变回液体,
手爪可迅速回到初始状态,相比现有技术成本低,基本无噪声。
附图说明
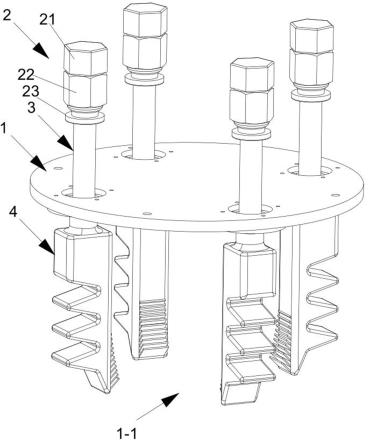
17.图1是本实施例1中一种两相驱动柔性手爪的整体结构示意图一;图2是本实施例1中一种两相驱动柔性手爪的爆炸图;图3是本实施例1中一种两相驱动柔性手爪的整体结构示意图二;图4是本实施例1中驱动塞与加热丝的组合结构示意图;图5是本实施例1中驱动塞的结构示意图;图6是本实施例1中驱动塞的仰视图;图7是本实施例1中加热丝的结构示意图;图8是本实施例1中柔性夹爪的外部结构示意图;图9是本实施例1中柔性夹爪从上往腔体内看时的结构示意图;图10是本实施例1中控制单元爆炸图;图11是本实施例1中控制单元与夹爪底座组合的结构示意图;图12为柔性夹爪负压向外弯曲的结构示意图;图13为柔性夹爪膨胀向内弯曲的结构示意图;图14为本实施例2中加热丝的结构示意图。
18.图中:夹爪底座1、夹口1-1、封口装置2、气管封闭内丝堵头21、气管快插接头22、密封圈23、气管3、柔性夹爪4、连接接口41、棱柱齿型外壳42、腔体薄膜43、仿生壁虎脚44、齿轮部45、驱动塞5、塔型气管接口51、第一螺栓固定孔52、加热丝通孔53、长加热丝固定柱54、短加热丝固定柱55、安装通孔56、第二螺栓固定孔57、圆台部58、加热丝6、长加热丝输出脚61、短加热丝输出脚62、电源连接端63、加热段64、隔热球64-1、输送孔7、电路通道8、控制单元9、上盖91、第二通孔91-1、控制板92、铜柱93、电池盒94、电池支架95、安装孔95-1。
具体实施方式
19.下面结合附图和实施例对本发明作进一步说明。
20.实施例1:如图1-图6所示,本实施例中所提供的一种两相驱动柔性手爪,包括夹爪底座1、封口装置2、气管3和中空的柔性夹爪4,所述夹爪底座1的下方设置有一个以上的所述柔性夹爪4,每一个柔性夹爪4的上方通过一个驱动塞5与所述气管3的下端口连通,在每一根气管3的上端口连接有一个所述的封口装置2,所述驱动塞5的下方连接有插入到柔性夹爪4中空内的加热丝6,所述驱动塞5上设置有将柔性夹爪4的中空部与气管3连通的输送孔7,在所述的柔性夹爪4内填充有型号为hfe7000的低沸点液体。在本实施例中所述的低沸点液体采用hfe-7000,它是一款没有闪点,不可燃,低gwp(它是物质产生温室效应的一个指数)值的电子氟化液产品。
21.为了当不需要往柔性夹爪4内部加入低沸点液体时,将气管上端头部进行密封设置,本实施例中所述封口装置2包括气管封闭内丝堵头21和气管快插接头22,所述气管封闭内丝堵头21的下端插入到气管3内,在所述气管封闭内丝堵头21的下方套有密封圈23,所述气管快插接头22与所述的气管封闭内丝堵头21螺纹连接。
22.为了能够进一步提高连接的密封性,本实施例中所述驱动塞5上设置有位于输送孔7上方的塔型气管接口51、一个以上的第一螺栓固定孔52以及两个加热丝通孔53,所述塔型气管接口51与输送孔7连通,所述驱动塞5的底部设置有长加热丝固定柱54和短加热丝固定柱55,在所述的夹爪底座1上设置有与柔性夹爪4一一对应的安装通孔56,所述塔型气管接口51伸出安装通孔56后与气管3连接,在所述的夹爪底座1上还设置有与第一螺栓固定孔52一一对应的第二螺栓固定孔57,第一螺栓固定孔52和第二螺栓固定孔57对齐后通过螺栓固定,所述驱动塞5下方为上粗下细的圆台部58。
23.为了能够进一步提高加热效率,本实施例中所述的加热丝6为一整条金属丝,其包含长加热丝输出脚61和短加热丝输出脚62、电源连接端63以及加热段64,所述长加热丝输出脚61和短加热丝输出脚62上均设置有一根所述的电源连接端63,所述的加热段64按次序缠绕在所述的长加热丝固定柱54和短加热丝固定柱55上。
24.为了方便操作,本实施例中所述柔性夹爪4包括连接接口41、棱柱齿型外壳42、腔体薄膜43和仿生壁虎脚44,所述棱柱齿型外壳42上方设置有所述的连接接口41,所述连接接口41套在圆台部58上并通过密封胶密封连接,所述棱柱齿型外壳42上方为中空腔体42-1,中空腔体42-1与棱柱齿型外壳42内部连通,在棱柱齿型外壳42的中空腔体42-1内设置有腔体薄膜43,所述棱柱齿型外壳42的一侧设置有一个以上的齿轮部45,在所述棱柱齿型外壳42的另一侧设置有一个以上的仿生壁虎脚44,所有棱柱齿型外壳42上的齿轮部45朝外设置,多个柔性夹爪4环形设置在所述夹爪底座1的下方,所有棱柱齿型外壳42上的齿轮部45朝夹爪底座1中心轴外侧设置,所有棱柱齿型外壳42上的仿生壁虎脚44朝向夹爪底座1中心轴设置构成夹口1-1。
25.为了提高加热效率,本实施例中所述的长加热丝固定柱54为两根,所述的短加热丝固定柱55为两根,且所述长加热丝固定柱54位于短加热丝固定柱55的内侧并靠近所述夹爪底座1中心轴。
26.为了方便布线,本实施例中在所述的驱动塞5上设置有用于过电线的电路通道8。
27.为了实现自动化操作,本实施例中一种柔性手爪,其还包括控制单元9,所述控制单元9包括上盖91、控制板92、铜柱93、电池盒94和电池支架95,所述控制板92通过螺丝固定在所述的上盖91上,所有长加热丝输出脚61上的电源连接端63相互连接有与所述控制板92的gng端连接,每一根短加热丝输出脚62上的电源连接端63分别连接控制板92上的不同控制端口,所述上盖91通过一根以上的铜柱93与所述的电池支架95固定连接,所述电池盒94固定在所述的电池支架95对应的安装孔95-1内,所述的夹爪底座1与电池支架95固定连接,且所述的气管快插接头22伸出所述上盖91上的第二通孔91-1。在本实施例中在所述夹爪底座1上设置有铜柱固定孔1-2。
28.在本实施例中所述的柔性夹爪4共有四个,因此对应的驱动塞5也有四个,气管也应该有四根,本结构的组装方式如下:夹爪底座1和四个驱动塞5通过夹爪底座1上的第二螺栓固定孔57和驱动塞5上的第一螺栓固定孔52对准,同时保证长加热丝固定柱54在内,短加热丝固定柱55在外后,然后上紧螺栓来固定夹爪底座1和驱动塞5;将加热丝6从驱动塞5上的一个加热丝通孔53中伸入,按次序缠绕两根长加热丝固定柱54及两根短加热丝固定柱55,最后从另一个加热丝通孔53拉出,同时保证每个手爪的加热丝在各自加热丝固定柱上缠绕的圈数相同,随后剪断加热丝固定柱底端并将其取出,同时为了保证密封效果,在加热
丝通孔53上使用耐温环氧胶进行封闭并起到固定加热丝的作用,随后将加热丝紧贴电路通道8拖至外道;将四只柔性手指上方的连接接口41套入驱动塞5下端的圆台部58上,在连接过程中保证棱柱齿型外壳42的齿轮部45朝外,同时将连接接口41与圆台部58处使用胶水封闭;将气管3一端通过驱动塞5上的塔型气管接口51相互连接固定,气管3另一端连接气管快插接头22的快插接口,气管快插接头22与气管封闭内丝堵头21螺纹连接,实现封闭。
29.为了增加手指导热性能,从而加速冷却过程,本实施例中所述棱柱齿型外壳42采用4d打印而成的,且所述棱柱齿型外壳42的材质中添加有氧化石墨烯和金属纳米颗粒,所述气管3为pu材质。
30.使用过程如下:第一步,拔下气管快插接头22,将针管口插入气管3抽取n毫升的空气,使柔性手爪4向外弯曲,其中针管头堵住气管3,两者处于密封状态;第二步,使用气管夹夹紧气管3的中间部分,使气管3中间密封,移除气管3上端的针管,同时使用另一只装有低沸点液体hfe7000的针管,将针管头堵住气管3后,松开气管夹,随后针管向中空腔体42-1内注入n/2毫升的低沸点液体hfe7000(熔点为32℃);第三步,再次使用气管夹夹紧气管3中间部分,随后将气管插入旋有气管封闭内丝堵头21的气管快插接头22,最后松开气管夹;按照同样的方式将其他三只柔性手爪4按上述步骤注入低沸点液体;此时四只手爪都处于像外弯曲状态,如图12所示,第四步,将加热丝6全段进行了表面处理,使用耐高温绝缘涂料浸泡后,可以避免加热丝接触短路,同时避免电击造成伤害;将柔性手爪4的长加热丝端连接到一起后连接控制板92的gnd,将柔性手爪4的短加热丝端分别连接至控制板92不同的控制接口,即可实现对不同加热丝的通电加热,少许热量即可将柔性手爪7的中空腔体42-1中的hfe7000液体加热气化,因为柔性手爪7所采用的材料为聚氨酯,刚度小,同时对其棱柱齿型外壳42内部的两侧进行了削薄,制成了腔体薄膜43,更大大提升了腔体膨胀过程的形变量,加速了手爪弯曲,棱柱齿型外壳42膨胀为球形,相互挤压同时拉动外部形变,如图13所示,使手爪向内弯曲,四只柔性手爪4向内弯曲;夹取结束,只需断电,液体在室温下可以迅速恢复液体形态,中空腔体42-1体积迅速变小,加上材料本身的恢复力,夹爪可迅速恢复为向外弯曲的起始形态,最终实现根据需要将物品进行夹紧的状态。
31.本发明通过将低沸点液体封装在密封的柔性手爪4内,通过加热使该低沸点液体气化造成手爪内压强变化来改变手爪弯曲角度从而抓取物品,避免了原有气动及液压柔性手爪结构复杂庞大、成本高的缺点,同时采用将手爪抽真空再灌入低沸点溶液的方式,使其初始状态处于负压的状态,使其弯曲范围和传统气动手爪类似;采用螺旋弯曲的金属丝直接加热被封装的低沸点液体,可以在短时间内使液体气化从而使手爪弯曲,室温下停止加热后该液体能在几秒内重新变回液体,手爪可迅速回到初始状态,相比现有技术成本低,基本无噪声,另外,本发明的对加热丝的加热方式采用控制器对其进行不同加热温度的方式进行加热,最终可以提供不同的抓取力,进一步提高夹紧力。
32.因此本发明具有以下技术效果:1)通过设置多个仿生壁虎脚44将其模拟成手的形式,进行对物体的柔性抓取从而避免破坏被抓物体表面,进一步保护器材;而且多个仿生壁虎脚44采用了平行同时向内扣的仿生壁虎脚结构,增加了抓取能力;2)采用hfe这种低沸点液体,可以通过低压电源进行加热,使液体能够迅速气化,从而驱动手爪弯曲抓取,无需采取气动形式,避免了气泵的使用,大大缩小夹爪体积,降低
了成本;3)另外通过对电源不同夹爪的电源通断,进行对不同位置夹爪进行控制,实现了对不同形状物体的适应抓取;(4)夹爪采用三角棱柱作为内腔体形状,从而减少了长方体腔体在负压时对手爪收缩角度和形状的限制;(5)在棱柱齿型外壳42表面采用减少表面厚度的设计,在其主体能够保证手爪的刚性从而保持自身形状的前提下,减少了膨胀形变需要的压力,同时增大形变量,更易抓取物体;(6)从图上看所述棱柱齿型外壳42上的仿生壁虎脚44为渐近线的结构(即各个仿生壁虎脚44尺寸逐一变大的方式),增加了与物体的接触面积,提升了手爪对物体的贴附性能。
33.实施例2:如图14所示,本实施例中所提供的一种两相驱动柔性手爪,为了防止内部加入后烫伤所述棱柱齿型外壳42的材料,在所述的加热段64外套有一个以上间隔设置的隔热球64-1,通过在加热段64外套多个隔热球64-1能够防止内部加入后烫伤所述棱柱齿型外壳42的材料,而损坏夹爪降低使用寿命。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
