1.本发明涉及人工智能技术领域,具体为一种基于结构化地图的码垛搬运机器人。
背景技术:
2.自20世纪70年代末,日本将机器人技术用于码垛工艺以来,码垛机器人的研究获得了迅速的发展,柔性、处理速度以及抓取重量不断提高,同时,码垛机器人占地面积小,能够同时处理多种物料和码垛多个料垛,越来越受到广大用户的青睐并迅速占领市场。码垛机器人的使用大大降低了人工劳动强度,提高了生产效率,现代的码垛机器人可以完成袋类、箱类等多种包装的搬运、码垛以及解垛等工作,相比较传统的机械式码垛机有着很强的优势。
3.现有基于结构化地图的码垛搬运机器人模型结构复杂、价格昂贵、无法有效实施推广。
技术实现要素:
4.本发明提供一种基于结构化地图的码垛搬运机器人,用于货物搬运,结构简单,成本低廉,解决了搬运货物时的人工操作,减轻工人的劳动负担,解放工厂的劳动力,提升作业效率;
5.为解决上述技术问题,本发明提供以下的技术方案:
6.本发明提供了一种基于结构化地图的码垛搬运机器人,
7.所述机器人包括机械爪、红外避障模块、舵机、舵机连接轴、机械臂固定座、灰度传感器固定座、车轮、车身、第一降压模块、第二降压模块、电池盒、车尾配重盒、配重块、有刷减速电机以及控制器,
8.所述车轮设置在所述车身下方,所述灰度传感器固定座设置在所述车身的车头处,所述灰度传感器固定座上设置有灰度传感器,所述电池盒设置在所述车身的车尾处,所述机械臂固定座设置在所述车身的上表面,所述舵机连接轴设置在所述机械臂固定座上,所述舵机设置在所述舵机连接轴上,所述机械爪设置在所述舵机上,所述红外避障模块设置在所述机械爪上,所述第一降压模块与所述第二降压模块均设置在所述车身上,所述控制器设置在所述第一降压模块上,所述车身上还设置有车尾配重盒,所述车尾配重盒上设置有配重块,所述有刷减速电机设置在所述车身的底部。
9.可选的,所述控制器包括电源模块、单片机、电机驱动模块,所述电源模块电性连接所述单片机和所述电机驱动模块用于供电,所述所述单片机电性连接电机驱动模块输出控制信号,所述单片机电性连接灰度传感器以及红外避障模块采集传感数据,所述有刷减速电机与所述车轮连接用以带动所述车轮运行,所述红外避障模块、灰度传感器、机械爪及有刷减速电机均电性连接到所述控制器。
10.可选的,所述车身上的所述第一降压模块提供6v电压连接到所述单片机与所述有刷减速电机进行供电,所述单片机提供5v电压连接到所述灰度传感器与所述红外避障模块
进行供电,所述车身上的所述第二降压模块提供6.8v电压连接到所述舵机进行供电。
11.可选的,所述车身尾部及下方分别设置有车底配重盒,所述车底配重盒内设置有铁片配重。
12.可选的,所述红外避障模块至少设置为两组,两组所述红外避障模块并排排列置于所述机械爪的中部。
13.可选的,所述灰度传感器至少设置为四组,四组所述灰度传感器安装于呈t字形的所述灰度传感器固定座中并置于所述车身的前侧。
14.可选的,所述车轮使用麦克纳姆轮。
15.本发明有益效果
16.本发明提供一种基于结构化地图的码垛搬运机器人,用于货物搬运,结构简单,成本低廉,解决了搬运货物时的人工操作,减轻工人的劳动负担,解放工厂的劳动力,提升作业效率。
附图说明
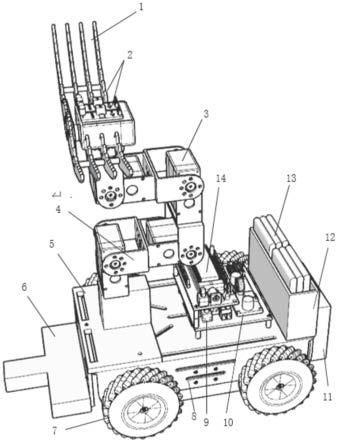
17.图1为本发明结构示意图。
18.图2为本发明结构仰视图。
19.附图标记说明:1-机械爪、2-红外避障模块、3-舵机,4-舵机连接轴,5-机械臂固定座,6-灰度传感器固定座,7-车轮,8-车身,9-第一降压模块,10-第二降压模块,11-电池盒,12-车尾配重盒,13-配重块,14-控制器,15-有刷减速电机,16-车底配重盒,17-电机驱动模块,18-灰度传感器。
具体实施方式
20.下面将结合本发明的实施例中的附图,对本发明的实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.实施例
22.如图1-图2所示,本发明提供了一种基于结构化地图的码垛搬运机器人,
23.所述机器人包括机械爪1、红外避障模块2、舵机3、舵机连接轴4、机械臂固定座5、灰度传感器固定座6、车轮7、车身8、第一降压模块9、第二降压模块10、电池盒11、车尾配重盒12、配重块13、有刷减速电机15以及控制器14,
24.所述车轮7设置在所述车身8下方,所述灰度传感器固定座6设置在所述车身8的车头处,所述灰度传感器固定座6上设置有灰度传感器18,所述电池盒11设置在所述车身8的车尾处,所述机械臂固定座5设置在所述车身8的上表面,所述舵机连接轴4设置在所述机械臂固定座5上,所述舵机3设置在所述舵机连接轴4上,所述机械爪1设置在所述舵机3上,所述红外避障模块2设置在所述机械爪1上,所述第一降压模块9与所述第二降压模块10均设置在所述车身8上,所述控制器14设置在所述第一降压模块9上,所述车身8上还设置有车尾配重盒12,所述车尾配重盒12上设置有配重块13,所述有刷减速电机15设置在所述车身8的底部,
25.所述控制器14包括电源模块、单片机、电机驱动模块17,所述电源模块电性连接所述单片机和所述电机驱动模块17用于供电,所述所述单片机电性连接电机驱动模块17输出控制信号,所述单片机电性连接灰度传感器18以及红外避障模块2采集传感数据,所述有刷减速电机15与所述车轮7连接用以带动所述车轮7运行,所述红外避障模块2、灰度传感器18、机械爪1及有刷减速电机15均电性连接到所述控制器14,
26.所述车身8上的所述第一降压模块9提供6v电压连接到所述单片机与所述有刷减速电机15进行供电,所述单片机提供5v电压连接到所述灰度传感器18与所述红外避障模块2进行供电,所述车身8上的所述第二降压模块10提供6.8v电压连接到所述舵机3进行供电,所述车身8尾部及下方分别设置有车底配重盒16,所述车底配重盒16内设置有铁片配重,
27.所述红外避障模块2至少设置为两组,两组所述红外避障模块2并排排列置于所述机械爪1的中部,所述灰度传感器18至少设置为四组,四组所述灰度传感器18安装于呈t字形的所述灰度传感器18固定座6中并置于所述车身8的前侧,在本实施例中,所述车轮7使用麦克纳姆轮;
28.首先,本实验施例的硬件选型如下:
29.(1)有刷减速电机15:
30.选择了一款额定电压为6v,最大扭力为0.75kg/cm的直流减速电机15,配备65mm的麦克纳姆轮7,电机由单脉冲信号控制,可调速调向,空载620n/min。
31.(2)电机驱动模块17:
32.选择了mda06r11电机驱动模块17但不限于此,可帮助机器人小车的轮子实现正转、反转或静止,通过调节脉冲长度可实现转速的调节。驱动组件具有两个电信号输入口,一个是3pin接口,一个是4pin接口(未使用)。3pin接口定义如下:vss电源负极;vcc电源正极;sig单脉冲信号输入端。
33.(3)舵机3:
34.选择了扭距为15.5kg/cm,额定电压为6v型号分别为sg100a、sg200a的单轴数字舵机3和双轴数字舵机3但不限于此。
35.(4)灰度传感器18:
36.选用isr212双qti边线检测灰度传感器18但不限于此,其最佳感应距离为5~10mm。
37.(5)红外避障模块2:
38.选用工作电压3.3~5v的红外避障模块2,其检测角度为35
°
,有效距离范围2~30cm。
39.(6)mcu:
40.选择了at89s52单片机作为微控制器14但不限于此,该款微控制器14从内部的硬件到软件的按位操作系统很完整,含4组8位共32个输入输出、5至6个中断源、分2个优先级,全双工串行口,片内ram区间有一个双重功能的地址区间,并拥有乘法和除法指令。
41.其次,本实施例需配合相应软件系统进行:
42.(1)主程序:首先需要完成io口、串口、灰度传感器18初始化,以及对有刷减速电机15、械臂爪1初始化、以及对有刷减速电机15和机械爪1的pid参数和关于相应定时器的寄存器进行初始化。然后开始不断采集灰度传感器18的线路数据与红外避障模块2的抓取数据,
最后控制直流减速电机15与机械臂3执行任务。
43.(2)pid控制算法:
44.首先初始化p、i、d等参数,主要有:当前偏差、上一次偏差以及p、i、d常数和设定值以及累计误差。随后根据pid算法原理计算出路径偏差值和积分值,进行限幅后计算出当前位置值。
45.采用上述软件,可进行如下实验操作:
46.(1)首先根据图1所示,采用12cm
×
20cm铝合金制车架身,在其上安装机械爪1以及机器人控制主板,机械爪1中部粘贴两个并排排列的红外避障传感器2,四个灰度传感器18安装于呈t字形的灰度传感器18固定座6中并置于车身8前侧,车尾及车底分别安装有6
×
50g与8
×
50g的配重块13。
47.(2)其次,对于硬件而言,需要建模打印固定器与连接件,主板上方的单元模块电路可以自行设计或者购买。
48.(3)最后,根据设定的功能利用c语言在keil软件中编写对应的程序,设计对应的pid控制系统算法,完成对应的任务函数。
49.由此,本技术所述基于结构化地图的码垛搬运机器人的工作原理如下:
50.通过不断采集灰度传感器18的线路数据与红外避障模块2的抓取数据,并将线路信息与抓取信息反馈于单片机14,进而控制直流减速电机15与机械臂3执行任务。
51.通过上述方式,本发明涵盖了pid自动控制原理及算法,该发明性价比很高,价格低廉,组装容易,使用方便,维护简单,移动方便,可以在自动化生产中大面积的使用,对生产成本的降低有极大的帮助。
52.综上所述,本发明提供了一种基于结构化地图的码垛搬运机器人,用于满足工厂物品的传输和节省人力资源,使工业生产真正意义上实现去除不必要的人力资源浪费,同时确保物品传输安全可靠。同时,该发明结构简单,成本低廉,解决码垛搬运机器人模型复杂、价格昂贵的问题。
53.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。