1.本发明涉及一种洛伦兹力磁浮卫星载荷舱快速振动抑制方法,适用于采用通过洛伦兹力磁轴承控制偏转两自由度的卫星载荷舱的振动抑制。
技术背景
2.当前对地观测的遥感卫星设计方案都是采用卫星平台和卫星载荷一体化设计,该方案的主要缺点是卫星平台受到的外界扰动以及自身执行机构工作过程中产生的扰动会传递到卫星的载荷上,导致载荷受扰动的影响,严重影响成像质量。除此之外,为了扩展对地观测卫星成像的空间分辨率,卫星需要进行姿态机动,使观测相机能够跟踪观测目标。我国现有的卫星平台机动方法都是整星机动,此方法在机动过程中会有很大的动量交换,导致机动过程困难。并且,在动量交换过程中,会带来巨大的振动,此振动使成像质量严重降低。为了弥补现有对地观测遥感卫星的缺点,专利zl201810281513.2发明了一种卫星用磁悬浮万向偏转隔震吊舱,该发明通过单独机动卫星载荷舱实现了载荷万向偏转,避免了整星机动所需的大角动量交换,同时也避免了平台舱与卫星载荷舱之间的振动传递。但卫星载荷舱在机动过后也会存在一定的振动扰动,降低载荷的观测效果。这种卫星用磁悬浮万向偏转隔震吊舱尚属新概念航天器平台,相关研究较少,所以如何降低主动抑制洛伦兹力磁浮卫星载荷舱的振动,是当前一个需要解决的问题。
技术实现要素:
3.本发明的技术解决问题是:针对洛伦兹力磁浮卫星载荷舱在进行大角度机动后存在的振动扰动如何抑制的问题,提出一种洛伦兹力磁浮卫星载荷舱快速振动抑制方法。该振动抑制方法完全通过算法实现,且算法简单运算块,延迟低,可大幅降低洛伦兹力磁浮卫星载荷舱在大角度机动后的稳定时间,为卫星用磁悬浮万向偏转隔震吊舱实现超稳、超敏性能奠定了基础。
4.本发明的技术解决方案:
5.根据磁浮卫星载荷舱五自由度控制方案建立卫星载荷舱动力学模型,通过观测洛伦兹力磁轴承偏转线圈控制电流分析得到卫星载荷舱的振动频率,通过自适应频率跟踪陷波器将该频率的同频成分提取进行前馈补偿,实现控制电流主频的同频抑制。具体包括以下步骤:
6.(1)建立卫星载荷舱的动力学模型
7.径向磁轴承控制用于控制卫星载荷舱径向平动两自由度,洛伦兹力磁轴承用于控制卫星载荷舱径向偏转两自由度和轴向平动自由度,卫星载荷舱轴向旋转自由度不发生运动。对卫星载荷舱进行五自由度动力学分析可得
[0008][0009]
其中,f
x
,fy,fz分别代表卫星载荷舱在轴向平动和径向两平动自由度上受到的力;m
α
,m
β
分别代表卫星载荷舱在径向偏转两自由度上受到的力矩;ki,ks分别代表径向磁轴承的电流刚度和位移刚度;is,iy分别代表卫星载荷舱径向两自由度上磁轴承线圈的电流;x,y分别代表卫星载荷舱在径向两自由度上的位移;nz,n
t
分别代表洛伦兹力磁轴承中轴向线圈和偏转线圈的匝数;b代表洛伦兹力磁轴承线圈工作气隙的磁密;r,lr分别代表洛伦兹力磁轴承轴向线圈和偏转线圈的安装半径;i
zs
,i
zx
分别代表洛伦兹力磁轴承上下两部分轴向线圈的电流;j
x
代表卫星载荷舱绕径向的转动惯量;代表卫星载荷舱绕径向的转动惯量;分别代表惯性坐标系下卫星载荷舱绕径向两自由度的偏转角加速度;代表洛伦兹力一组偏转线圈对应的圆心角;i1,i2,i3,i4分别代表洛伦兹力磁轴承每组偏转线圈的电流,其中i1与i3相对,i2与i4相对;
[0010]
(2)卫星载荷舱振动频率估计
[0011]
估计卫星载荷舱振动频率首先要测出卫星载荷舱偏转角速度。卫星载荷舱偏转角速度检测方案有两种,第一种是通过洛伦兹力磁轴承偏转线圈内电流估计出卫星载荷舱相对于惯性系的姿态角速度
[0012][0013]
其中,分别代表经第一种方案解算的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角速度;估计卫星载荷舱姿态角速度的第二种方案是通过卫星平台舱姿态角速度与卫星载荷舱相对于卫星平台舱的偏转角速度之和求得
[0014][0015]
其中,分别代表经第二种方案解算的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角速度;ω
x
,ωy分别代表经平台舱上惯性测量单元测得的两自由度的偏转角速度;分别代表卫星载荷舱相对于平台舱绕径向两自由度的偏转角加速度;为了提高对卫星载荷舱振动频率估计的精度,通过对两种方案解算的卫星载荷舱偏转角速度进行信息融合,得到最终的卫星载荷舱偏转角速度
[0016][0017]
其中,分别代表两种方案信息融合后得到的惯性坐标系下卫星载荷舱绕径
向两自由度的偏转角速度;λ1,μ1分别代表第一种方案解算的两自由度偏转角速度的权值;λ2,μ2分别代表第二种方案解算的两自由度偏转角速度的权值;对和进行傅里叶变换即可估计出卫星载荷舱的振动频率。两种方案解算的卫星载荷舱偏转角速度的权值有如下关系
[0018][0019]
在两种方案的权值分配上,考虑到第二种方案中的和是经对角位移传感器输出结果进行求导得到的,求导过程会增加噪声,且该噪声会随着频率的增加而增大;故在10hz以下的低频段,两种方案的权值对等分配,当在10hz以上的频段时,第一种方案的权值随着频率的增加而增大,第二种方案的权值随着频率的增加而减少,二者的权值之和保持为1;以所在轴的权值为例,具体分配方案如下
[0020][0021]
其中,ω
l1
代表经所在轴的控制电流计算得到的振动频率;所在轴的权值分配方案与(6)式相同。
[0022]
(3)自适应频率跟踪陷波器抑制卫星载荷舱振动
[0023]
通过自适应频率跟踪陷波器实现卫星载荷舱振动抑制的控制框图如图3所示。通过监测洛伦兹线圈中控制电流解算出第一种方案的振动频率,通过卫星平台舱上惯性测量单元与角位移传感器解算出第二种方案的振动频率,通过加权求和得出卫星载荷舱的振动频率;将该频率带入自适应频率跟踪陷波器便能实现卫星载荷舱振动的快速抑制。其中自适应频率跟踪陷波器的传递函数为
[0024][0025]
其中,no(s)代表从自适应频率跟踪陷波器输入到输出的传递函数;r(s)代表自适应频率跟踪陷波器的输入;y(s)代表自适应频率跟踪陷波器的输出;ω
l
代表卫星载荷舱的振动频率,该频率由对(4)式解算结果进行傅里叶变换得到;ε是用于调节陷波器的收敛速度和中心陷波带宽的参数。
[0026]
本发明的发明原理是:根据卫星载荷舱的五自由度控制方案建立卫星载荷舱动力学模型,通过观测洛伦兹力磁轴承偏转线圈控制电流分析得到卫星载荷舱的振动频率,通过自适应频率跟踪陷波器将该频率的同频成分提取进行前馈补偿,实现控制电流主频的同频抑制。
[0027]
由于该振动抑制方法完全通过算法实现,且算法简单运算块,延迟低,可大幅降低洛伦兹力磁浮卫星载荷舱在大角度机动后的稳定时间,为卫星用磁悬浮万向偏转隔震吊舱实现超稳、超敏性能奠定了基础。
[0028]
本发明的方案与现有方案比,主要优点在于:可以实现洛伦兹力磁浮卫星载荷舱
振动频率的快速检测,并利用可实现洛伦兹力磁浮卫星载荷舱在大角度机动后的快速振动抑制。
附图说明
[0029]
图1具体实施方案图;
[0030]
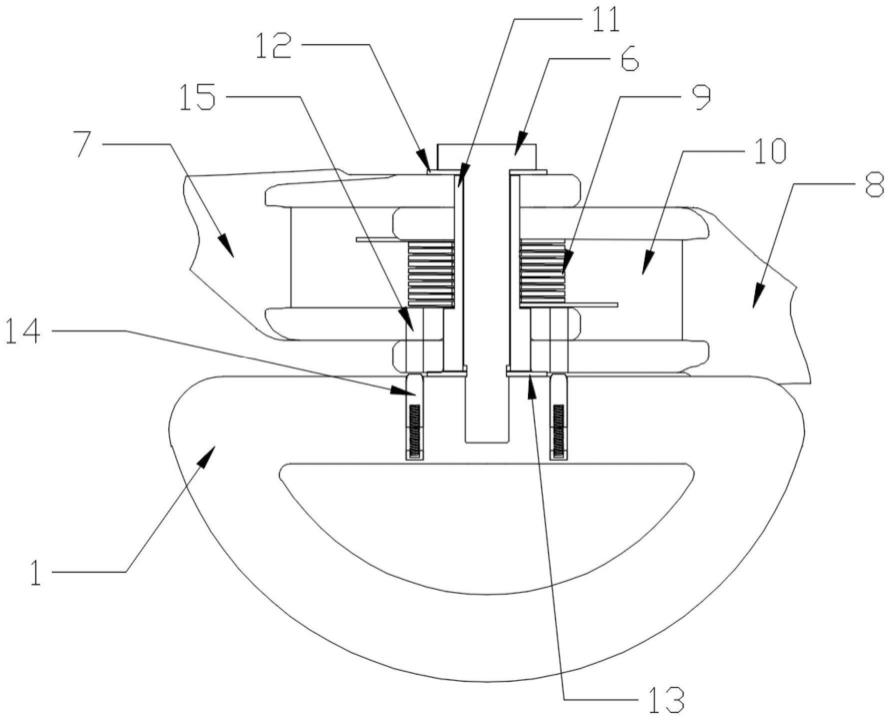
图2磁悬浮吊舱结构图;
[0031]
图3磁浮卫星载荷舱快速振动抑制逻辑框图。
具体实施方案
[0032]
本发明的具体实施方案如图1所示,具体实施步骤如下:
[0033]
(1)建立卫星载荷舱的动力学模型
[0034]
如图2为磁悬浮万向偏转隔震吊舱的结构示意图,该吊舱由卫星平台舱、和卫星载荷舱组成。其中卫星平台舱上安装有角位移传感器、径向磁轴承、洛伦兹力磁轴承及执行机构等部件;卫星载荷舱上主要用于安装相机等有效载荷。径向磁轴承控制用于控制卫星载荷舱径向平动两自由度,洛伦兹力磁轴承用于控制卫星载荷舱径向偏转两自由度和轴向平动自由度,卫星载荷舱轴向旋转自由度不发生运动。对卫星载荷舱进行五自由度动力学分析可得
[0035][0036]
其中,f
x
,fy,fz分别代表卫星载荷舱在轴向平动和径向两平动自由度上受到的力;m
α
,m
β
分别代表卫星载荷舱在径向偏转两自由度上受到的力矩;ki,ks分别代表径向磁轴承的电流刚度和位移刚度;is,iy分别代表卫星载荷舱径向两自由度上磁轴承线圈的电流;x,y分别代表卫星载荷舱在径向两自由度上的位移;nz,n
t
分别代表洛伦兹力磁轴承中轴向线圈和偏转线圈的匝数;b代表洛伦兹力磁轴承线圈工作气隙的磁密;r,lr分别代表洛伦兹力磁轴承轴向线圈和偏转线圈的安装半径;i
zs
,i
zx
分别代表洛伦兹力磁轴承上下两部分轴向线圈的电流;j
x
代表卫星载荷舱绕径向的转动惯量;代表卫星载荷舱绕径向的转动惯量;分别代表惯性坐标系下卫星载荷舱绕径向两自由度的偏转角加速度;代表洛伦兹力一组偏转线圈对应的圆心角;i1,i2,i3,i4分别代表洛伦兹力磁轴承每组偏转线圈的电流,其中i1与i3相对,i2与i4相对;
[0037]
(2)卫星载荷舱振动频率估计
[0038]
估计卫星载荷舱振动频率首先要测出卫星载荷舱偏转角速度。卫星载荷舱偏转角速度检测方案有两种,第一种是通过洛伦兹力磁轴承偏转线圈内电流估计出卫星载荷舱相对于惯性系的姿态角速度;根据(8)式可直接写出卫星载荷舱相对于惯性系的姿态角加速度
[0039][0040]
其中,分别代表经控制电流解算的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角加速度;进一步可得出卫星载荷舱相对于惯性系的姿态角速度
[0041][0042]
其中,分别代表经第一种方案解算的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角速度;估计卫星载荷舱姿态角速度的第二种方案是通过卫星平台舱姿态角速度与卫星载荷舱相对于卫星平台舱的偏转角速度之和求得
[0043][0044]
其中,分别代表经第二种方案解算的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角速度;ω
x
,ωy分别代表经平台舱上惯性测量单元测得的两自由度的偏转角速度;分别代表卫星载荷舱相对于平台舱绕径向两自由度的偏转角加速度;为了提高对卫星载荷舱振动频率估计的精度,通过对两种方案解算的卫星载荷舱偏转角速度进行信息融合,得到最终的卫星载荷舱偏转角速度
[0045][0046]
其中,分别代表两种方案信息融合后得到的惯性坐标系下卫星载荷舱绕径向两自由度的偏转角速度;λ1,μ1分别代表第一种方案解算的两自由度偏转角速度的权值;λ2,μ2分别代表第二种方案解算的两自由度偏转角速度的权值;对和进行傅里叶变换即可估计出卫星载荷舱的振动频率。两种方案解算的卫星载荷舱偏转角速度的权值有如下关系
[0047][0048]
在两种方案的权值分配上,考虑到第二种方案中的和是经对角位移传感器输出结果进行求导得到的,求导过程会增加噪声,且该噪声会随着频率的增加而增大;故在10hz以下的低频段,两种方案的权值对等分配,当在10hz以上的频段时,第一种方案的权值随着频率的增加而增大,第二种方案的权值随着频率的增加而减少,二者的权值之和保持为1;以所在轴的权值为例,具体分配方案如下
[0049][0050]
其中,ω
l1
代表经所在轴的控制电流计算得到的振动频率;所在轴的权值分配方案与(15)式相同,可写为
[0051][0052]
其中,ω
l2
代表经所在轴的控制电流计算得到的振动频率。
[0053]
(3)自适应频率跟踪陷波器抑制卫星载荷舱振动
[0054]
通过自适应频率跟踪陷波器实现卫星载荷舱振动抑制的控制框图如图3所示。通过监测洛伦兹线圈中控制电流解算出第一种方案的振动频率,通过卫星平台舱上惯性测量单元与角位移传感器解算出第二种方案的振动频率,通过加权求和得出卫星载荷舱的振动频率;将该频率带入自适应频率跟踪陷波器便能实现卫星载荷舱振动的快速抑制。其中自适应频率跟踪陷波器的传递函数为
[0055][0056]
其中,no(s)代表从自适应频率跟踪陷波器输入到输出的传递函数;r(s)代表自适应频率跟踪陷波器的输入;y(s)代表自适应频率跟踪陷波器的输出;ω
l
代表卫星载荷舱的振动频率,该频率由对(12)式解算结果进行傅里叶变换得到;ε是用于调节陷波器的收敛速度和中心陷波带宽的参数。
[0057]
本发明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。