1.本发明属于曲面板螺柱焊接技术领域,具体涉及一种核电曲面板用智能螺柱焊接方法及系统。
背景技术:
2.核电关键部件曲面板采用龙门式焊接机器人完成螺柱焊接;在一些需求中,需要加工螺柱垂直焊接在曲面板表面的,由于龙门式焊接机器人由于其本身结构,只能在水平或竖直方向上运动,相对于曲面板表面垂直焊接的需求来说焊接程度有限。
3.即使在螺柱焊枪上增加角度调节机构,使得螺柱焊枪的角度与曲面板表面垂直,满足垂直焊接的需求,但曲面板的弧度情况较为复杂,其变化不是线性变化,所以仅仅通过人眼观察调整螺柱焊枪的角度使得其焊接方向与曲面板表面垂直是比较困难的;而且曲面板每一次弧度变化都需要调整焊接方向,由于人眼观察的局限性,会导致调整次数过多或过少,影响焊接效率。
技术实现要素:
4.发明目的:为了解决上述问题,本发明提供了一种核电曲面板用智能螺柱焊接方法及系统。
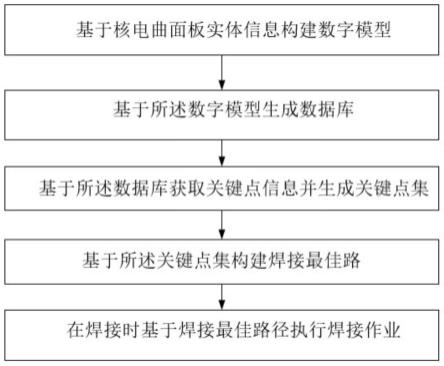
5.技术方案:一种核电曲面板用智能螺柱焊接方法,包括以下步骤:基于核电曲面板实体信息构建数字模型,基于所述数字模型生成数据库;基于所述数据库,获取关键点信息并生成关键点集;基于所述关键点集,构建焊接最佳路径;在焊接时基于焊接最佳路径执行焊接作业。
6.在进一步的实施例中,所述构建数字模型具体步骤如下:以核电曲面板侧面所在平面建立第一平面坐标系;将核电曲面板侧面形状模拟为位于所述第一平面坐标系的曲线,设定所述曲线函数为f(x);获取所述曲线上任意一点坐标,得到该曲线所有点坐标集合i,i=,其中,i为曲线上第i个点。
7.在进一步的实施例中,在预定区间内,f(x)达到相对最大值,设定该点为所述曲线的峰值点,基于所述集合i,得到峰值点集f,,其中,j为峰值点的个数;在预定区间内,f(x)达到相对最小值,设定该点为所述曲线的谷值点,基于所述集合i,得到谷值点集g,,其中,m为谷值点的个数;设定两个相邻的峰值点和谷值点之间的曲线为曲线峰谷单元,计算曲线峰谷单元内的关键点个数;
设定所述曲线峰谷单元中峰值点为,谷值点为;计算获取,,则与之间的曲线中的关键点个数满足以下计算公式:,其中为单位长度系数;得到的个关键点中仅包含峰值点或谷值点;计算获取所述曲线中所有曲线峰谷单元中的关键点个数,并得到关键点集,其中,所述关键点集包括关键点的个数以及坐标信息。
8.在进一步的实施例中,设定关键点集中包含n个关键点,其中n为整数且n大于2;以关键点划分焊接区域,设定核电曲面板上相邻关键点之间的区域为焊接区域单元,得到焊接区域单元集合s,,其中,为第n-1个焊接区域单元;计算相邻关键点之间的斜率并得到斜率集k,,其中,n-1为n-1个斜率值;与一一对应。
9.在进一步的实施例中,选取所述斜率集k中两个相邻的斜率和,其中e为整数,且,计算获取;将与阈值d比较,构建焊接最佳路径;若,则对单独执行焊接作业,并计算下一组斜率差获取,将与阈值d比较;若,则对单独执行焊接作业,且计算下一组斜率差并重复与阈值d比较,直至所有焊接区域单元焊接完毕;若,则对和合并,且继续计算,将与阈值d比较;若,则将与上述合并后的、一起合并,且继续计算下一组斜率差值重复与阈值d比较,直至所有焊接区域单元焊接完毕;若,则执行和合并焊接,并计算,并阈值d比较,直至所有焊接区域单元焊接完毕。
10.在进一步的实施例中,若,则对和合并,且继续计算,将与阈值d比较;若,则将与上述合并后的、一起合并,且继续计算下一组斜率差值重复与阈值d比较,直至所有焊接区域单元焊接完毕;若,则执行和合并焊接,并计算,并阈值d
比较,直至所有焊接区域单元焊接完毕。
11.在进一步的实施例中,以得到的焊接区域单元所在平面建立第二平面坐标系,确定螺柱待焊接点为的坐标信息,得到螺柱待焊接点坐标集合r,r=,依据集合r,移动焊接头,执行焊接作业。
12.在进一步的实施例中,所述焊接头所在直线方向与焊接区域所在平面垂直,具体如下:设定焊接头在第一平面坐标系所在直线的斜率为;当焊接区域仅包含一个斜率值,设定该斜率值为,则;当焊接区域包含至少两个斜率值,设定斜率值为、
…
,则。
13.另一个实施例中提供了一种核电曲面板用智能螺柱焊接系统,包括装置和控制单元;其中,所述控制单元包括:第一模块,被设置基于核电曲面板实体信息构建数字模型,并基于所述数字模型生成数据库;第二模块,被设置基于所述数据库计算生成关键点集;所述关键点集包括关键点个数以及获取关键点坐标信息;第三模块,被设置基于关键点集,构建焊接路径并生成焊接指令。
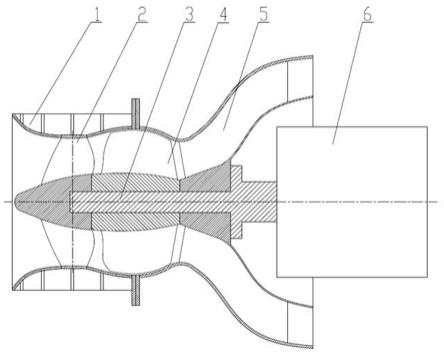
14.在进一步的实施例中,所述装置包括:龙门架;螺柱焊枪,传动连接于所述龙门架;角度调节件,连接于所述螺柱焊枪;其中,所述角度调节件用于调节所述螺柱焊枪的角度。
15.有益效果:将核电曲面板根据自身弯曲情况,将其分割成若干个焊接区域单元,并以此构建最佳焊接路径,基于最佳焊接路径进行切割;螺柱焊接装置在焊接时,通过调整焊接方向,实现焊接方向与焊接点所在平面垂直时,既能保证每一个螺柱焊接在核电曲面板上时保持垂直结构,增加个体稳定性,又能保证相同平面内的螺柱方向都一致,增加整体的稳定性;在阈值范围内,将可合并的焊接区域单元合并焊接,减少螺柱焊接装置角度调节次数,以实现提高焊接精度的同时提高焊接效率。
附图说明
16.图1是本发明的方法流程图。
具体实施方式
17.为了解决现有技术中存在的问题,申请人对现有各种方案进行了深入地分析,具体如下:核电关键部件曲面板采用龙门式焊接机器人完成螺柱焊接;在一些需求中,需要加工螺柱垂直焊接在曲面板表面的,由于龙门式焊接机器人由于其本身结构,只能在水平或竖直方向上运动,相对于曲面板表面垂直焊接的需求来说焊接程度有限。即使在螺柱焊
枪上增加角度调节机构,使得螺柱焊枪的角度与曲面板表面垂直,满足垂直焊接的需求,但曲面板的弧度情况较为复杂,其变化不是线性变化,所以仅仅通过人眼观察调整螺柱焊枪的角度使得其焊接方向与曲面板表面垂直是比较困难的;而且曲面板每一次弧度变化都需要调整焊接方向,人眼观察的局限性,会导致调整次数过多或过少,影响焊接效率。
18.实施例1为了解决上述技术问题,如图1所示,本实施例提供了一种核电曲面板用智能螺柱焊接方法,包括以下步骤:步骤一、基于核电曲面板实体信息构建数字模型,基于所述数字模型生成数据库。进一步说明,核电曲面板从侧面来看,具有弧度或者侧表面为波动的曲线,以核电曲面板所在的平面建立第一平面坐标系,将核电曲面板侧面形状模型成位于该第一平面坐标系的曲线,此时忽略核电曲面板的厚度;将产品实体模型成数字信息,提高焊接的智能化。
19.步骤二、基于所述数据库,获取关键点信息并生成关键点集。进一步说明,核电曲面板自身弧度变化非线性,模拟出的曲线的弧度变化也为非线性,曲线上的点很多,为了提高焊接效率,需要进一步地在曲线上选取关键点信息,通过关键点对曲线进行分解,来确定如何焊接。
20.步骤三、基于所述关键点集,构建焊接最佳路径;在焊接时基于焊接最佳路径执行焊接作业;进一步说明,利用得出的关键点集,得出曲线的关键信息,即可优化出焊接的最佳路径,以提高焊接效率,提高智能化水平,提高焊接精度。
21.构建数字模型具体步骤如下:以核电曲面板侧面所在平面建立第一平面坐标系;将核电曲面板侧面形状模拟为位于所述第一平面坐标系的曲线,设定所述曲线函数为f(x);核电曲面板为实体产品,可通过视觉系统来获取核电曲面板上任意一点坐标信息,即可转化为所述曲线上任意一点坐标,进而得到该曲线所有点坐标集合i,i=,其中,i为曲线上第i个点。
22.在预定区间内(预定区间的范围为即在曲线上一个距离区间内,f(x)仅出现一个最大值和一个最小值),f(x)达到相对最大值,设定该点为所述曲线的峰值点,基于所述集合i中的坐标点信息,得到曲线中所有的峰值点并形成峰值点集f,,其中,j为峰值点的个数,峰值点集f包括峰值点的个数以及坐标信息;在预定区间内,f(x)达到相对最小值,设定该点为所述曲线的谷值点,基于所述集合i中的坐标点信息,得到曲线中所有谷值点并形成谷值点集g,,其中,m为谷值点的个数,谷值点集g包括谷值点的个数以及坐标信息;设定两个相邻的峰值点和谷值点之间的曲线为曲线峰谷单元,计算曲线峰谷单元内的关键点个数;举例来说,设定所述曲线峰谷单元中峰值点为,谷值点为;计算获取,,则与之间的曲线中的关键
点个数满足以下计算公式:,其中为单位长度系数,为常数,其实际值根据实际焊接需求而定,取值在(0,20)范围内,的选值尽可能使得合并后的焊接区域单元区域平面,减少弧度。得到的个关键点中仅包含峰值点或谷值点,换言之,在一个曲线峰谷单元中,峰值点或谷值点为端部关键点,在一次计算单元中仅包含一个端部关键点,另外一个端部关键点被计算至上一个计算单元或者下一个计算单元中;计算单元为计算曲线峰谷单元中关键点的个数。根据上述信息,计算获取所述曲线中所有曲线峰谷单元中的关键点个数,并得到关键点集,其中,所述关键点集包括关键点的个数以及坐标信息。
23.设定上述得到的关键点集中包含n个关键点,其中n为整数且n大于2;以关键点划分焊接区域,设定核电曲面板上相邻关键点之间的区域为焊接区域单元,换句话说,整个核电曲面板分割成单独的焊接区域,而且以核电曲面板侧面划分,每一个焊接区域至少为两个相邻关键点之间的区域;从两两关键点之间的区域得到焊接区域单元集合s,,其中,为第n-1个焊接区域单元;计算相邻关键点之间的斜率并得到斜率集k,,其中,n-1为n-1个斜率值;与一一对应;相邻关键点之间的斜率计算方法如下:设定相邻关键点分为v、t,由关键点集中的坐标信得出v和 t的坐标信息,设定为,则得到相邻关键点之间的斜率为。
24.基于所述关键点集,构建焊接最佳路径,具体构建如下:选取所述斜率集k中两个相邻的斜率和,其中e为整数,且,计算获取;将与阈值d比较,构建焊接最佳路径;1.1若,则对单独执行焊接作业,并计算下一组斜率差获取,将与阈值d比较;d为常数,其实际值根据实际焊接需求而定,在本实施例中,d的选值尽可能使得合并后的焊接区域单元区域平面,减少弧度,d取值在[0,1)范围内。
[0025]
1.11若,则对单独执行焊接作业,且计算下一组斜率差并重复与阈值d比较,直至所有焊接区域单元焊接完毕;1.12若,则对和合并,且继续计算,将与阈值d比较;1.121若,则将与上述合并后的、一起合并,且继续计算下一组斜率差值重复与阈值d比较,直至所有焊接区域单元焊接完毕;
1.122若,则执行和合并焊接,并计算,并阈值d比较,直至所有焊接区域单元焊接完毕。
[0026]
1.2若,则对和合并,且继续计算,将与阈值d比较;1.21若,则将与上述合并后的、一起合并,且继续计算下一组斜率差值重复与阈值d比较,直至所有焊接区域单元焊接完毕;1.22若,则执行和合并焊接,并计算,并阈值d比较,直至所有焊接区域单元焊接完毕。
[0027]
举例说明,焊接路径从第一个关键点开始,即从核电曲面板的端部开始,设定e=1,计算,判断与d之间的大小;1.1 若,说明对应的与对应的之间倾斜程度或者弧度相差大于阈值,不能合并焊接,则对单独执行焊接作业,同时继续判断下一个斜率差与阈值的大小,即与d之间的大小,其中;1.11 若,则对单独执行焊接作业,同时继续判断下一个斜率差与阈值的大小,即与d之间的大小,其中,,依次类推直至焊接完毕;1.12 若,则生成将和合并焊接指令,同时继续判断下一个斜率差与阈值的大小,即与d之间的大小,其中,;1.121若,则生成将与上述和一起合并,同时继续判断下一个斜率差与阈值的大小,得出是否满足合并条件(合并条件即为斜率差不大于阈值),若满足则将、、和一起合并焊接,依次类推直至焊接完毕;1.122 若,则不能满足合并条件,则对和合并焊接;接着继续计算下一个斜率差与阈值的大小,即与d的大小,判断和是否满足合并焊接条件,依次类推直至焊接完成。
[0028]
1.2 若,则生成将和合并焊接指令,同时继续计算下一个斜率差与阈值的大小,即与d之间的大小,其中;1.21若,则生成将与上述和一起合并,同时继续判断下一个斜率差与阈值的大小,得出是否满足合并条件,若满足则将、、和一起合并焊接,依次类推直至焊接完毕;1.22若,则不能满足合并条件,则执行和合并焊接指令;接着计算
下一个斜率差与阈值的大小,即与d的大小,判断和是否满足合并焊接条件,依次类推直至焊接完成。
[0029]
上述过程即为已经把核电曲面板被关键点分割成一个单独的焊接区域单元,如果直接以相邻关键点形成的焊接区域单元去一个一个焊接,虽然焊接精度高,但焊接效率低,所以上述过程是将相邻的、可以合并焊接的焊接区域单元且处于阈值范围内进行合并焊接;其余不是相邻的,不能合并的焊接区域单元单独焊接,以实现提高焊接精度的同时提高焊接效率。合并焊接的条件即为相邻的焊接区域单元对应的斜率值之间的差值,若该差值大于阈值d,则表示该相邻两个焊接区域单元不能合并焊接;若该差值不大于阈值d ,则表示该相邻两个焊接区域单元可合并焊接。
[0030]
基于上述构建的焊接最佳路径,螺柱焊接装置执行焊接作业;以得到合并后焊接区域单元或单独的焊接区域单元所在平面(该平面为核电曲面板的上表面或者说是核电曲面板待焊接的表面)建立第二平面坐标系,根据实际需求确定螺柱待焊接点位置坐标信息,进而得到螺柱待焊接点坐标集合r,r=,依据集合r,移动焊接头,执行焊接作业。
[0031]
螺柱焊接装置在焊接时,焊接方向与焊接点所在平面垂直时,既能保证每一个螺柱焊接在核电曲面板上时保持垂直结构,增加个体稳定性,又能保证相同平面内的螺柱方向都一致,增加整体的稳定性;为所述焊接头所在直线方向(即为焊接方向或者说螺柱长度方向)与焊接区域所在平面垂直,具体如下:设定焊接头在第一平面坐标系所在直线的斜率为;当焊接区域仅包含一个斜率值(即仅为一个焊接区域单元),设定该斜率值为,则;当焊接区域包含至少两个斜率值(即合并的焊接区域单元,包含至少两个焊接区域单元),设定斜率值为、
…
,则。
[0032]
螺柱焊接装置在不同的焊接区域中焊接时,基于不同的,调整自身角度,用以实现与焊接区域所在平面保持垂直,提高精准度;当螺柱焊接装置从一个焊接区域转移到下一个焊接区域时,需要调整自身角度,调整自身角度越多,则焊接花费时间就越多,所以在上述中,尽可能地阈值范围内合并焊接区域单元,减少螺柱焊接装置调整角度次数,以实现提高焊接精度的同时提高焊接效率。
[0033]
实施例2本实施例公开了一种核电曲面板用智能螺柱焊接系统,用以实现实施例1所述的方法。包括装置和控制单元;其中,所述控制单元包括:第一模块,被设置基于核电曲面板实体信息构建数字模型,并基于所述数字模型生成数据库;第二模块,被设置基于所述数据库计算生成关键点集;所述关键点集包括关键点个数以及获取关键点坐标信息;第三模块,被设置基于关键点
集,构建焊接路径并生成焊接指令。
[0034]
进一步的实施例中,所述装置包括:龙门架、螺柱焊枪以及角度调节件;螺柱焊枪与龙门架传动连接,可采用齿轮齿条或直线丝杆模组等现有技术来实现螺柱焊枪的水平或竖直运动,具体结构不在此赘述;角度调节件安装在螺柱焊枪上,角度调节件用于调节螺柱焊枪的焊接角度,实现焊接角度与焊接点所在平面垂直,可采用齿轮转动等现有技术来实现,具体结构不在此赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。