1.本发明涉及一种机器人技术,尤其是一种异形表面清洗机器人,具体地说是一种轮船清洗机器人。
背景技术:
2.众所周知,船舶在航行一段时间后,由于表面腐蚀需要定期进港进行重新涂装,而涂装前必须对船体表面进行涂层的清理,将原先的涂层及表面附着物清除,露出基体才能重新进行涂装施工。传统的人工砂轮打磨由于效率低而逐渐被机器人技术所替代,而利用超高压水对船体表面进行喷射清除是目前常用的机器人清洗技术。但据申请人所知,目前的清洗机器人存在吸附力不够、不能实现水下作业以及越障能力不高的问题,急需加以改进。
技术实现要素:
3.本发明的目的是针对现有的清洗机器人存在吸附力不够、不能实现水下作业以及越障能力不高的问题,设计一种吸力大并带有补充动力、铣削速度快的水陆二用的轮船清洗机器人。
4.本发明的技术方案是:一种轮船清洗机器人,它包括壳体17,壳体17上设有与吸污泵相连的真空管2和与高压水发生器相连的高压水输入管21,其特征是:壳体17的前端两侧各安装有一个浮动安装的驱动轮8,驱动轮8由安装在浮动支架15中的蜗杆5驱动转动,蜗杆5与安装在浮动支架15中的蜗轮4相啮合,蜗轮4由安装在浮动支架15外的伺服电机6驱动,浮动支架15通过浮动支架轴16定位在壳体17中的浮动支架安装座19中,浮动支架轴16能限制浮动支架15的轴向运动而不限制其上下移动,从而使与浮动支架相连的驱动轮能克服障碍作一侧或双侧的偏转及抬升/下降运动;在壳体17的后部安装有强磁盘安装座20,强磁盘安装座20的四周安装有用于使整个机器人与船体吸附防止其跌落船体的强磁盘1,强磁盘1的四周安装有若干个小转向轮3,小转向轮一方面使强磁盘与船体表面保持设定的距离以形成清洗间隙,另一方面与驱动轮一起带动整个机器人沿设定的方向移动;在强磁盘1的中心安装有清洗旋转体总成11;所述的壳体17的上部安装有能产生推力以使机器人压向船体的一个或以上均布的旋翼风机14。
5.所述的旋翼风机14的数量为4个,它们均安装在相应的圆柱形风筒中。
6.所述的小转向轮3通过销轴13安装在辅助支架13上,辅助支架13通过螺母18固定在强磁盘安装座20上的辅助轮安装座22上。
7.所述的壳体17的前端安装有吊环23。
8.所述的清洗旋转体总成11由内盘24、外盘25和旋转喷嘴10组成,内盘24和外盘25之间加装有硅胶密封垫,内盘24设有外凸环26,外盘24设有内凸环27,压板28的一端固定在内盘24上,另一端与弹簧安装轴29的一端相连,弹簧安装轴29上安装有弹簧30,弹簧30的一
端与压板29相抵,另一端与外盘25相抵,外盘25的端面上安装有紧贴清洗表面的毛刷,一圈毛刷能阻挡住被清洗污物的外泄,以便与内盘相连通的真空管2能及时将污物排入污物收集装置中;弹簧30使得外盘25端面的毛刷与清洗表面相接触;外凸环26和内凸环27相互配合使得外盘25作相对于内盘24的轴向移动;内盘24固定安装在壳体17中,内盘24设有高压水输入管21,高压水输入管21位于内盘24内的一端上安装有旋转喷嘴总成10。
9.所述的旋转喷嘴总成10由旋转接头、中心喷盘31和喷臂32组成,旋转接头与高压水输入管21的输出端相连,中心喷盘31与旋转接头相连,喷臂32与中心喷盘相连,中心喷盘32和喷臂32上均设有喷孔33。
10.所述的喷臂32的数量为三条或以上,每条喷臂32上的喷孔33呈螺旋线分布,以便各喷孔喷射到清洗表面产生的反作用力能推动旋转喷嘴总成10在内盘中高速旋转,以实现清洗表面的快速清除。
11.所述的喷孔33中安装有角度可调的喷管,通过调整喷管的角度调整旋转喷嘴总成10的转速。
12.本发明的有益效果:本发明吸附可靠,吸力大,除了采用永磁强磁块作为第一吸附力外,还通过旋翼风机产生的反作用力使机器人本体吸附在船体表面,且通过调整风机的转速和叶片的角度可调整反作用力的大小,实现精准吸附。
13.本发明采用300mpa以上的超高压水作为船体表面铣削用水,同时配以十字架结构的旋转喷架,在喷架上再按螺旋线布置喷孔,实现了十字喷架的快速旋转,同时通过调节并锁定喷孔的出水角度,利用高压水实现十字喷架转速的调整。
14.本发明结构简单,制造装配方便。
附图说明
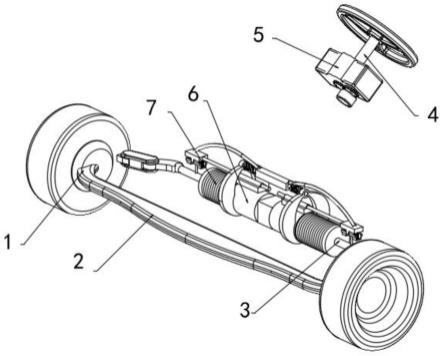
15.图1是本发明的机器人主体结构的立体分解正视示意图。
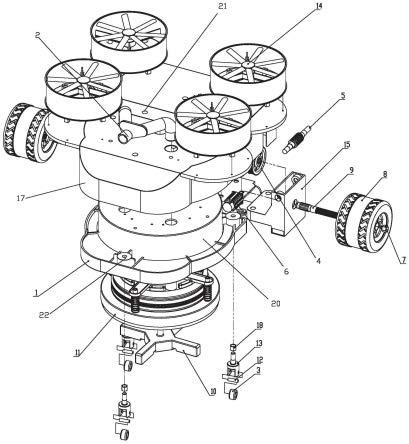
16.图2是本发明的机器人主体结构的立体分解后视示意图。
17.图3是本发明的清洗旋转体总成的立体结构示意图。
18.图4是图3的内部结构剖视图。
19.图5是图3的仰视结构示意图。
20.图6是本发明的强磁盘的立体结构示意图。
21.图7是图6的仰视图。
22.图中:7为驱动轮锁紧螺母,9为驱动轮花键。
具体实施方式
23.下面结合附图和实施例对本发明作进一步的说明。
24.如图1-7所示。
25.一种轮船清洗机器人,如图1所示,它包括壳体17,所述的壳体17的前端安装有吊环23(如图7),壳体17上安装有与吸污泵相连的真空管2和与高压水发生器相连的高压水输入管21,高压水发生器的输出压力最好是在300kpa以上,可直接从市场购买或定制。壳体17的前端两侧各安装有一个浮动安装的驱动轮8,驱动轮8由安装在浮动支架15中的蜗杆5驱
动转动,蜗杆5与安装在浮动支架15中的蜗轮4相啮合,蜗轮4由安装在浮动支架15外的伺服电机6驱动,浮动支架15通过浮动支架轴16定位在壳体17中的浮动支架安装座19中,如图2所示,浮动支架轴16能限制浮动支架15的轴向运动而不限制其上下移动,从而使与浮动支架相连的驱动轮能克服障碍作一侧或双侧的偏转及抬升/下降运动,由于驱动轮能在一定范围内灵活转动,因此,本发明能适应船体各部位及各种曲面上的行走清洗,实现无死角作业;在壳体17的后部安装有强磁盘安装座20,强磁盘安装座20的四周安装有用于使整个机器人与船体吸附防止其跌落船体的强磁盘1(如图6、7所示),强磁盘1的四周安装有三个小转向轮3,所述的小转向轮3通过销轴13安装在辅助支架13上,辅助支架13通过螺母18固定在强磁盘安装座20上的辅助轮安装座22上(如图1右下)。小转向轮一方面使强磁盘与船体表面保持设定的距离以形成清洗间隙,另一方面与驱动轮一起带动整个机器人沿设定的方向移动;在强磁盘1的中心安装有清洗旋转体总成11;所述的壳体17的上部安装有能产生推力以使机器人压向船体的一个或以上均布的旋翼风机14,所述的旋翼风机14的数量为4个,它们均安装在相应的圆柱形风筒中。旋翼风机14在水面作用时产生推力使机器人本体压向船体,在水下作用时可起到桨翼的作用,将壳体推向船体以弥补强磁盘磁力的不足。具体而言,清洗旋转体总成11可直接从市场定购安装,也可采用现有的机器人相同的喷嘴结构实现,但最好是参照图3-5的结构加以实现,如图4所示,本实施例的清洗旋转体总成11由内盘24、外盘25和旋转喷嘴10组成,内盘24和外盘25之间加装有硅胶密封垫,内盘24设有外凸环26,外盘24设有内凸环27(图4),压板28的一端固定在内盘24上,另一端与弹簧安装轴29的一端相连,弹簧安装轴29上安装有弹簧30,弹簧30的一端与压板29相抵,另一端与外盘25相抵,如图3,外盘25的端面上安装有紧贴清洗表面的毛刷,一圈毛刷能阻挡住被清洗污物的外泄,以便与内盘相连通的真空管2能及时将污物排入污物收集装置中;弹簧30使得外盘25端面的毛刷与清洗表面相接触;外凸环26和内凸环27相互配合使得外盘25作相对于内盘24的轴向移动;内盘24固定安装在壳体17中,内盘24设有高压水输入管21,高压水输入管21位于内盘24内的一端上安装有旋转喷嘴总成10。同样的,旋转喷嘴总成10可直接从市场购置或采用与现有的机器人相同的结构。本发明采用的是如图5所示的结构,它由旋转接头、中心喷盘31和喷臂32组成,旋转接头与高压水输入管21的输出端相连,中心喷盘31与旋转接头相连,喷臂32与中心喷盘相连,中心喷盘32和喷臂32上均设有喷孔33。所述的喷臂32的数量为三条或以上,每条喷臂32上的喷孔33呈螺旋线分布,以便各喷孔喷射到清洗表面产生的反作用力能推动旋转喷嘴总成10在内盘中高速旋转,以实现清洗表面的快速清除。所述的喷孔33中安装有角度可调的喷管,通过调整喷管的角度调整旋转喷嘴总成10的转速。
26.具体实施时,还可通过控制系统使旋翼风机14反转,以便当机器人从船体上跌落时产生升力,使机器人类似于直升机悬浮或降低跌落的速度,防止机器人摔坏。
27.由上可知,本发明吸附可靠,吸力大,除了采用永磁强磁块制作的强磁盘作为第一吸附力外,还通过旋翼风机产生的反作用力使机器人本体吸附在船体表面,且通过调整风机的转速和叶片的角度可调整反作用力的大小,实现精准吸附,本发明不仅可用于无水状态下的使用,同时可在水下进行作用。
28.本发明采用300mpa以上的超高压水作为船体表面铣削用水,同时配以十字架结构的旋转喷架,在喷架上再按螺旋线布置喷孔,实现了十字喷架的快速旋转,同时通过调节并锁定喷孔的出水角度,利用高压水实现十字喷架转速的调整。
29.本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。