1.本发明涉及物流仓储管理技术领域,具体为一种物流仓储管理系统。
背景技术:
2.仓储物流是指通过自建或租赁库房、场地,对仓储物进行储存、保管、装卸搬运。而对于一些较为规则且批量存储的存储物,一般进行密集性堆叠,如面粉、水泥、纸质箱体以及受温湿度影响较大的存储物等,为从而尽可能的提高存储空间的有效利用率,但由于以堆叠摆放的存储形式,在提高储仓室空间利用率的同时,导致存储物之间所存有的空间间隙及存储仓室空间剩余的空间均较小,从而使得对存储仓室内部温湿度的监测不均匀,增大后期对仓储物所处环境的监测管理复杂程度,而现有物流仓储过程中,其对存储物的存储空间,一般均为固定存储空间,难以实际根据存储物体积的不同,对存储空间进行调控,提供最佳所需的存储空间,从而导致存储空间未能充分利用,降低有效存储空间利用率,产生存储空间的资源浪费。
3.因此,本领域技术人员提供了一种物流仓储管理系统,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种物流仓储管理系统,其包括:
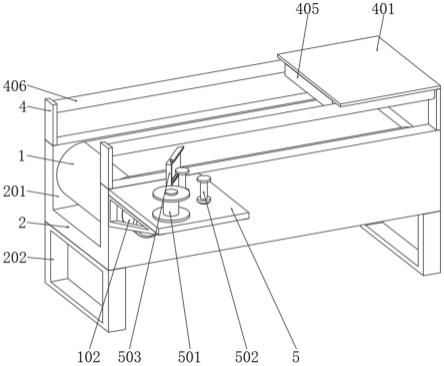
5.以匀速运行并用于将存储物输送一定高度的输送模块,所述输送模块包括倾斜向上的输送部以及位于最顶端的水平输送部,且所述水平输送部的上方还设有用于监测扫描存储物轮廓形态尺寸的形态扫描模块,所述形态扫描模块包括有横跨覆罩于输送面域的冂形架、位于所述冂形架上的横跨并面向输送面域的板面上安装有前后指向且线性排列密布的激光测距单元以及用于计量存储物通过激光测距单元前后所经历时间的重置式计时模块;
6.用于数据处理并反馈调控仓储空间调控模块以及仓储室中的温湿度监控模块的智能控制模块;
7.用于收集所述水平输送部输出存储物并转运至仓储空间调控模块的转运模块。
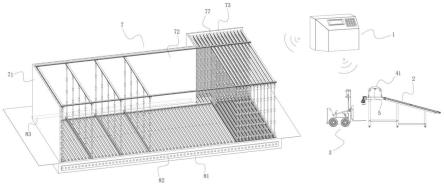
8.作为本发明的一种优选技术方案,所述仓储空间调控模块包括:
9.呈方形形态设置的仓储房,所述仓储房内部设有用于存储存储物的仓储腔室以及靠近所述仓储腔室进入口处一侧的滞留腔室,所述仓储房的底部安装有前后指向并左右线性排列的辅助横移组件;
10.呈左右指向并设置四组的且分别安装于所述仓储房前后侧顶部和底部的横导轨一,且处于同一水平面中的前后侧横导轨一之间均配合安装有前后指向并左右线性排列设置多组的横移导轨架,所述横移导轨架包括有两组安装于对应侧所述横导轨一上的驱动座一以及两端分别与对应端部处的驱动座一相固定的横导轨二;
11.设置于滞留腔室中的并与横导轨二相平齐的横导轨三,且位于上下方同一纵向面
上的横导轨三之间安装有纵向设置的横移杆件,且所述横移杆件能够从横导轨三上移动至横导轨二上。
12.作为本发明的一种优选技术方案,所述横移杆件包括:
13.两组分别与上下方设有的横导轨二配合安装驱动的驱动座二;
14.上下端分别与上下方设有的驱动座二相固定的支撑杆,且所述支撑杆上套有可调控高度的温湿监测元件。
15.作为本发明的一种优选技术方案,所述辅助横移组件包括:
16.呈方形结构设置的条形箱壳,所述条形箱壳内部开设有容置腔室;
17.呈左右对称设置于所述容置腔室内部底端的伸缩柱,所述伸缩柱上输出端固定有t型杆,所述t型杆左侧板面固定有旋转电机,所述旋转电机输出轴部安装有主锥齿轮,所述t型杆上端部安装转轴套;
18.左右端分别与左右侧设有的转轴套转动连接的辅送辊,且靠近主锥齿轮一侧的辅送辊的端部固定有与主锥齿轮啮合连接的从锥齿轮。
19.作为本发明的一种优选技术方案,所述伸缩柱包括:
20.固定于所述条形箱壳底壳壁上的固定筒,所述固定筒内部开设有纵向指向的十字腔室,位于十字腔室的底部安装有电磁体;
21.嵌入所述十字腔室轴部的顶柱,所述顶柱底端部安装有磁体,所述顶柱的靠低端侧环壁上固定有与十字腔室配合滑动的翼片,且所述翼片的外部套有缓震套;
22.上下端分别与十字腔室顶部、翼片上端面相连接的复位弹簧。
23.作为本发明的一种优选技术方案,相邻所述辅助横移组件之间所夹间隙设为用于调控仓储房中的导流腔,并在所述导流腔的外部密封围有调控箱壳,且与每组所述导流腔对应的调控箱壳壳面均开设有导流孔,位于导流孔的对立面处设有散气腔。
24.作为本发明的一种优选技术方案,所述顶柱的上升距离为辅送辊顶端水平切面距离位于底部的横导轨二上端面之间的距离。
25.作为本发明的一种优选技术方案,位于所述条形箱壳上端面上还设有监测条形箱壳上方是否有横导轨二的红外避障感应模块,并由所述红外避障感应模块反馈调控电磁体处于赋磁吸引与消磁复位,且所述红外避障感应模块感知有横导轨二后,则向相邻且横导轨二移动方向上的红外避障感应模块传递反馈调控对应的电磁体赋磁吸引,促使辅送辊瞬间下落,待横导轨二通过下落后的辅送辊后,则对应的电磁体消磁,并由对应所述复位弹簧回拉顶柱复位。
26.作为本发明的一种优选技术方案,所述旋转电机驱动带动辅送辊旋转的线速度与驱动座一带动横导轨二的移动速度相一致。
27.与现有技术相比,本发明提供了一种物流仓储管理系统,具备以下有益效果:
28.本发明中通过对存储物外部轮廓的快速扫描,并得出其外部轮廓数据,从而便于精准确定存储物的体积形态,并通过智能控制模块预先模拟出气所需存储堆叠完成后的形态,以及间隔间距,并还可根据存储物的不同,快速改变温湿监测元件的分布位置及范围,从而能够有效便捷的实时监测堆叠成整体式结构的存储物所处环境的状况,且通过底部划分存储腔室的存储空间,使得后续及时对存储物所处的环境的改善,更加便捷,使得存储物均匀摆放的情况下,所处环境的监测和改善的可控度较高。
附图说明
29.图1为本发明的物流仓储管理结构示意图;
30.图2为本发明的物流仓储管理系统示意图;
31.图3为本发明的仓储空间调控模块结构示意图;
32.图4为本发明的仓储空间调控模块右视局部结构示意图;
33.图5为本发明的仓储空间调控模块右视局部截面结构放大示意图;
34.图6为本发明的辅助横移组件局部结构放大示意图;
35.图中:1、智能控制模块;2、输送模块;3、转运模块;4、形态扫描模块;5、激光测距单元;6、重置式计时模块;7、仓储空间调控模块;8、温湿度监控模块;9、辅助横移组件;41、冂形架;71、仓储房;72、仓储腔室;73、滞留腔室;74、横导轨一;75、驱动座一;76、横导轨二;77、横导轨三;78、横移杆件;781、驱动座二;782、支撑杆;81、调控箱壳;82、导流孔;83、散气腔;84、导流腔;85、温湿监测元件;91、条形箱壳;92、伸缩柱;93、t型杆;94、转轴套;95、辅送辊;96、从锥齿轮;97、旋转电机;98、主锥齿轮;921、固定筒;922、十字腔室;923、顶柱;924、翼片;925、磁体;926、电磁体;927、复位弹簧。
具体实施方式
36.参照图1-6,本发明提供一种技术方案:一种物流仓储管理系统,其包括:
37.以匀速运行并用于将存储物输送一定高度的输送模块2,所述输送模块2包括倾斜向上的输送部以及位于最顶端的水平输送部,且所述水平输送部的上方还设有用于监测扫描存储物轮廓形态尺寸的形态扫描模块4,所述形态扫描模块4包括有横跨覆罩于输送面域的冂形架41、位于所述冂形架41上的横跨并面向输送面域的板面上安装有前后指向且线性排列密布的激光测距单元5以及用于计量存储物通过激光测距单元5前后所经历时间的重置式计时模块6,以激光测距单元所在水平面为基准面,由激光测距单元测量出存储物表面轮廓距离基准面的距离,并随输送模块对存储物的匀速v传递传送,及激光测距单元等时间段t的数据传递方式,对存储物的外部轮廓快速扫描,得出存储物外部轮廓点的数据,进而得出存储物三维立体数据,并在多组激光测距单元中的所测数据中依次挑选出所测距离为最小值的数据为存储物的最高轮廓点h、位于前侧所测距离产生变化的最前侧的一组数据的激光测距单元所处位置a1、位于后侧所测距离产生变化的最后侧的一组数据的激光测距单元所处位置a2,且激光测距单元的位置坐标由后侧至前侧方向依次增大,重置式计时模块所测时间记录为δt,从而得出存储物的长为δa=a1-a2,宽为b=v
×
δt,高为h,从而得出存储物的三维立体数据并记录为轮廓数据,从而能够高效的测出存储物的所占体积空间的数据;
38.用于数据处理并反馈调控仓储空间调控模块7以及仓储室中的温湿度监控模块8的智能控制模块1,通过智能控制模块对轮廓数据的处理反馈,并调控仓储空间调控模块对仓存储空间进行分配和温湿度监控模块的分布位置,从使得对仓储物的监测数据更加精准;
39.用于收集所述水平输送部输出存储物并转运至仓储空间调控模块7的转运模块3,通过转运模块将输送模块上的存储物转运至仓储空间调控模块的进入口,并由仓储空间调控模块将存储物再次转运。
40.本实施例中,所述仓储空间调控模块7包括:
41.呈方形形态设置的仓储房71,所述仓储房71内部设有用于存储存储物的仓储腔室72以及靠近所述仓储腔室72进入口处一侧的滞留腔室73,所述仓储房71的底部安装有前后指向并左右线性排列的辅助横移组件9,所述辅助横移组件能够贴合触碰作用于最底部的存储物的最底端面,并用于辅助存储物在仓储空间调控模块中的转运移送;
42.呈左右指向并设置四组的且分别安装于所述仓储房71前后侧顶部和底部的横导轨一74,且处于同一水平面中的前后侧横导轨一74之间均配合安装有前后指向并左右线性排列设置多组的横移导轨架,所述横移导轨架包括有两组安装于对应侧所述横导轨一74上的驱动座一75以及两端分别与对应端部处的驱动座一75相固定的横导轨二76,且位于下方的所述横移导轨架用于接收负载由转运模块转运的存储物,并在驱动座一的带动下,促使上下方横导轨二以及位于下方的横导轨二上放置的存储物,同步被移动转运,且所述驱动座一可直接被智能控制模块进行调控,横导轨一的长度记为l1,横导轨二的长度记为l2;
43.设置于滞留腔室73中的并与横导轨二76相平齐的横导轨三77,且位于上下方同一纵向面上的横导轨三77之间安装有纵向设置的横移杆件78,且所述横移杆件78能够从横导轨三77上移动至横导轨二76上,所述横移杆件从横导轨三中传递至横导轨二上的分布数量及间隔间距,均有所述智能控制模块接收到存储物轮廓数据后对所述横移杆件的分布数量及间隔间距进行调控。
44.本实施例中,所述横移杆件78包括:
45.两组分别与上下方设有的横导轨二76配合安装驱动的驱动座二781,所述驱动座二被智能控制模块控制运动;
46.上下端分别与上下方设有的驱动座二781相固定的支撑杆782,且所述支撑杆782上套有可调控高度的温湿监测元件85,且所述支撑杆不仅用于温湿监测元件的安装及空间分布设置,还可用于对堆叠的存储物进行辅助支撑,以便存储物之间预留间隙的设置,从而保证存储物有序摆放存储及摆放稳定性。
47.本实施例中,所述辅助横移组件9包括:
48.呈方形结构设置的条形箱壳91,所述条形箱壳91内部开设有容置腔室;
49.呈左右对称设置于所述容置腔室内部底端的伸缩柱92,所述伸缩柱92上输出端固定有t型杆93,所述t型杆93左侧板面固定有旋转电机97,所述旋转电机97输出轴部安装有主锥齿轮98,所述t型杆93上端部安装转轴套94;
50.左右端分别与左右侧设有的转轴套94转动连接的辅送辊95,且靠近主锥齿轮98一侧的辅送辊95的端部固定有与主锥齿轮98啮合连接的从锥齿轮96,且所述辅送辊上表面可设有用于提高摩擦力的花纹,从而能够使得与存储物的触碰面更加紧密。
51.本实施例中,所述伸缩柱92包括:
52.固定于所述条形箱壳91底壳壁上的固定筒921,所述固定筒921内部开设有纵向指向的十字腔室922,位于十字腔室922的底部安装有电磁体926,所述电磁体为导电赋磁和断电消磁结构装置;
53.嵌入所述十字腔室922轴部的顶柱923,所述顶柱923底端部安装有磁体925,所述顶柱923的靠低端侧环壁上固定有与十字腔室922配合滑动的翼片924,且所述翼片924的外部套有缓震套,所述磁体能够与导电赋磁状态的电磁体相互吸附;
54.上下端分别与十字腔室922顶部、翼片924上端面相连接的复位弹簧927,所述复位弹簧初始状态时,使得辅送辊的最上端水平切面与横导轨二的上端面相对处于平齐状态;
55.需要注意的是,所述缓震套外表面与十字腔室壁具有一定摩擦作用,从而能够避免复位弹簧复位时,辅送辊被迫产生较长持续性及较大的振动幅度,进而促使辅送辊被复位弹簧复位后能够瞬间处于稳定状态。
56.本实施例中,相邻所述辅助横移组件9之间所夹间隙设为用于调控仓储房中的导流腔84,并在所述导流腔84的外部密封围有调控箱壳81,且与每组所述导流腔84对应的调控箱壳81壳面均开设有导流孔82,位于导流孔82的对立面处设有散气腔83,通过所述调控箱壳的对形成的导流腔进行侧部围堵密封,以便能够对仓储腔室空间纵向划分,从而便于每组导流腔中进入的温湿气体,能够相对的集中于某一区域,进而提高对存有存储物的区域的异常环境的温湿度进行相对定点区域的调控改善,且每组导流孔均通过管道独立连接,并作为较佳实施例,除通过导流孔改善仓储腔室空间内的空气湿度外,还可以气态的消毒剂、灭虫剂等对仓储物保护所需的能够以气态流动的形式,均能够通过导流孔向仓储腔室内部整体扩散以及定点扩散,同时有效提高了其扩散的均匀度及扩散效率。
57.本实施例中,所述顶柱923的上升距离为辅送辊95顶端水平切面距离位于底部的横导轨二76上端面之间的距离。
58.本实施例中,位于所述条形箱壳91上端面上还设有监测条形箱壳91上方是否有横导轨二76的红外避障感应模块,并由所述红外避障感应模块反馈调控电磁体926处于赋磁吸引与消磁复位,且所述红外避障感应模块感知有横导轨二76后,则向相邻且横导轨二76移动方向上的红外避障感应模块传递反馈调控对应的电磁体926赋磁吸引,促使辅送辊瞬间下落,待横导轨二76通过下落后的辅送辊后,则对应的电磁体926消磁,并由对应所述复位弹簧927回拉顶柱923复位;
59.需要解释的是,初始状态时,除了位于横导轨二下方的辅压辊处于条形箱壳内部外,剩余辅压辊均与横导轨二上端平面处于相对平齐状态,而当出现一组横导轨二进行移动时,以横导轨二待移动方向为前向为例,横导轨二开始移动时,则位于此横导轨二下方的红外避障感应模块瞬间传递至此横导轨二前方一组辅助横移组件中设有的一组红外避障感应模块,并反馈控制对应的电磁体赋磁吸附磁体,促使辅压辊瞬间下落,进而使得横导轨二能够无障碍的向前移动,并且在横导轨二移动后,之前位于已处于下方的辅压辊的辅助横移组件中红外避障感应模块感知上方无障碍时,则反馈控制对应电磁体消磁,进而对应的辅压辊上升补位,从而完成紧靠横导轨二前方的辅压辊下落留出空位、后方的辅压辊上升补位,进而便于存储物的转运传送更加稳定。
60.本实施例中,所述旋转电机97驱动带动辅送辊95旋转的线速度与驱动座一75带动横导轨二76的移动速度相一致,避免因辅送辊与存储物接触时的水平线速度与横导轨二的水平移动速度不一致,导致存储物无法进行转运。
61.在具体实施时,其包括以下步骤:
62.s1:以匀速v启动输送模块,将所需存储的存储物放置输送模块上端;
63.s2:通过激光测距单元以等时间段t的监测数据并上传记录的方式,对存储物的外部轮廓快速扫描,以及启动重置式计时模块,在测量数据中选出并计算出:重置式计时模块所测时间记录为δt,存储物的高h,存储物的长为δa=a1-a2,存储物的宽为b=v
×
δt,并
反馈于智能控制模块中,再结合所需堆叠的存储物的水平前后相邻间隔间距δc,此中前后指向为与横导轨二相平行,水平左右相邻间隔间距δd,此中左右指向为与横导轨一相平行,且若选择存储物的长边与横导轨二平行摆放时,则通过智能控制模块进行模拟计算,e=l2/(n δc),代入n=δa,并对e取整数得出e1,因此得出沿横导轨二方向的能够摆放的存储物的数量为e1,而沿横导轨一摆放过程为,由左至右依次摆放,摆放间隔为δd,若选择存储物的宽边与横导轨二平行摆放时,则将n=b,代入e=l2/(n δc)中,从而能够高效的测出存储物预计摆放分布状况,且再存储物导入的过程中,横移杆件也同步进入横导轨二中进行分布,并根据所需温湿度监控模块的所需监测区域范围的分布,选择横导轨二上所需设有的横移杆件,且横移杆件均位于间距δc中,进而完成存储物及温湿度监测元件的均匀分布摆放。
64.以上所述,仅为发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。