技术特征:
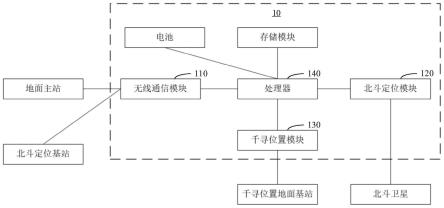
1.一种巡检装置,其特征在于,所述巡检装置设置于无人机上;所述巡检装置包括:无线通信模块,所述无线通信模块用于接收北斗定位基站发送的误差校正数据;北斗定位模块,所述北斗定位模块用于接收北斗卫星发送的北斗信号数据;千寻位置模块,所述千寻位置模块用于接收千寻位置地面基站发送的千寻位置数据;处理器,所述处理器分别连接所述无线通信模块、所述北斗定位模块以及所述千寻位置模块,用于在所述巡检装置处于第一模式的情况下,基于所述误差校正数据和所述北斗信号数据,确定所述无人机的位置;所述处理器还用于在所述巡检装置处于第二模式的情况下,基于所述千寻位置数据,确定所述无人机的位置;以及用于通过所述无线通信模块将所述无人机的位置发送给地面主站;所述无人机的位置用于指示所述地面主站反馈无人机巡检策略。2.根据权利要求1所述的巡检装置,其特征在于,所述误差校正数据包括所述北斗定位基站的观测坐标值、与所述北斗定位基站的精确坐标值之间的差分信号数据。3.根据权利要求1所述的巡检装置,其特征在于,所述无人机的位置包括所述无人机的观测坐标值。4.根据权利要求1至3任一项所述的巡检装置,其特征在于,所述无线通信模块为支持单模无线通信协议的芯片或支持多模无线通信协议的芯片;所述处理器被配置为搭载具有载波相位差分rtk定位程序的嵌入式操作系统。5.一种巡检方法,其特征在于,所述方法应用于权利要求1至4中任一项所述的巡检装置中的处理器;所述方法包括:在所述巡检装置处于第一模式的情况下,基于所述误差校正数据和所述北斗信号数据,确定所述无人机的位置;在所述巡检装置处于第二模式的情况下,基于所述千寻位置数据,确定所述无人机的位置;将所述无人机的位置发送给地面主站;所述无人机的位置用于指示所述地面主站反馈无人机巡检策略。6.一种无人机,其特征在于,所述无人机包括权利要求1至4任一项所述的巡检装置;所述无人机还包括光电吊舱和云台;所述光电吊舱连接所述云台和所述处理器,用于获取无人机巡检数据。7.一种巡检系统,其特征在于,所述系统包括权利要求6所述的无人机;所述系统还包括地面主站;所述地面主站配置有:巡检控制装置,所述巡检控制装置连接所述巡检装置,用于接收所述无人机的位置,并反馈所述无人机巡检策略。8.根据权利要求7所述的巡检系统,其特征在于,所述巡检控制装置用于监控所述无线通信模块和所述北斗定位基站之间的数据传输状态,并根据所述数据传输状态输出相应的模式指令,以指示所述巡检装置进入所述第一模式或所述第二模式。9.根据权利要求8所述的巡检系统,其特征在于,在所述数据传输状态为正常的情况下,所述巡检控制装置输出用于指示所述巡检装置进入所述第一模式的模式指令;
在所述数据传输状态为异常的情况下,所述巡检控制装置输出用于指示所述巡检装置进入所述第二模式的模式指令。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求5所述的方法的步骤。
技术总结
本申请涉及一种巡检装置、方法、无人机、系统和存储介质。所述巡检装置设置于无人机上,包括:无线通信模块,用于接收北斗定位基站发送的误差校正数据;北斗定位模块,用于接收北斗卫星发送的北斗信号数据;千寻位置模块,用于接收千寻位置地面基站发送的千寻位置数据;处理器,分别连接无线通信模块、北斗定位模块以及千寻位置模块,用于在巡检装置处于第一模式的情况下,基于误差校正数据和北斗信号数据,确定无人机的位置;处理器还用于在巡检装置处于第二模式的情况下,基于千寻位置数据确定无人机的位置;以及将无人机的位置发送给地面主站;无人机的位置用于指示地面主站反馈无人机巡检策略。采用本方法能够提高无人机自动巡检安全性。巡检安全性。巡检安全性。
技术研发人员:舒应军 曾懿辉 麦俊佳 徐振磊 孙钦章 刘双武 王昊 刘岚
受保护的技术使用者:广东电网有限责任公司佛山供电局
技术研发日:2022.04.11
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。