一种无人驾驶adas控制器的测试方法和装置
技术领域
1.本发明实施例涉及自动驾驶测试技术领域,尤其涉及一无人驾驶adas控制器的测试方法和装置。
背景技术:
2.高级驾驶辅助系统(advanced driving assistance system,adas)控制器测试是自动驾驶前期的重要阶段,在hil测试中场景软件可以模拟测试阶段所需的任何场景,车辆动力学模型软件可以进行高自由度车辆模型的仿真,有效的节约测试时间与成本。目前多机hil测试已成趋势,但对于adas控制器的模拟仿真测试存在方法单一,且无法满足多场景测试要求的难题。
技术实现要素:
3.本发明针对现有技术中存在的技术问题,提供一种无人驾驶adas控制器的测试方法及装置。
4.为解决上述技术问题,第一方面,本发明实施例提供一种无人驾驶adas控制器的测试方法,包括:
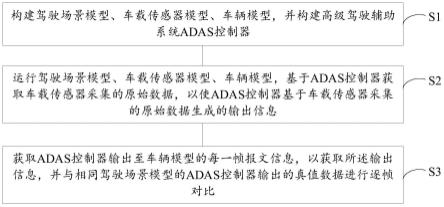
5.步骤s1、构建驾驶场景模型、车载传感器模型、车辆模型,并构建高级驾驶辅助系统adas控制器;
6.步骤s2、运行驾驶场景模型、车载传感器模型、车辆模型,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息;
7.步骤s3、获取adas控制器输出至车辆模型的每一帧报文信息,以获取所述输出信息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
8.作为优选的,所述步骤s1具体包括:
9.在第一上位机上基于simulink构建驾驶场景模型和车载传感器模型,在第二上位机上基于carsim构建车辆模型,基于nvidia drive px2构建高级驾驶辅助系统adas控制器。
10.作为优选的,所述步骤s1中,所述车载传感器模型包括带识别功能的车载传感器模型,以及不带识别功能的车载传感器模型;
11.所述adas控制器包括带识别模式和不带识别模式;其中,不带识别模式处理带识别功能的车载传感器模型的输出数据,带识别模式处理不带识别功能的车载传感器模型的输出数据。
12.作为优选的,所述步骤s1中,并构建高级驾驶辅助系统adas控制器后,还包括:
13.构建第一上位机、第二上位机、adas控制器的局域网通信协议,adas控制器与第二上位机使用can协议进行通信,驾驶模拟器采用usb协议与第二上位机进行通信;第一上位机与第二上位机、第一上位机与驾驶模拟器、第一上位机与adas控制器采用udp协议进行通
信。
14.作为优选的,所述步骤s2,所述输出信息包括感知信息、融合信息、决策信息和控制功能信息。
15.作为优选的,所述步骤s3中,并与相同驾驶场景模型的adas控制器输出的校准数据进行逐帧对比后,还包括:
16.基于可视化报表生成函数,将adas控制器的真值数据进行对比验证,将每一帧的各类属性的误差数以及漏检测数和成功数进行统计,以图表形式反馈。
17.第二方面,本发明实施例提供一种无人驾驶adas控制器的测试装置,包括:
18.第一上位机,用于基于simulink构建驾驶场景模型、车载传感器模型;
19.第二上位机,用于基于carsim构建车辆模型,基于nvidia drive px2构建高级驾驶辅助系统adas控制器;
20.开发上位机,获取第一上位机运行simulink、第二上位机运行carsim时,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
21.第三方面,本发明实施例提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明第一方面实施例所述无人驾驶adas控制器的测试方法的步骤。
22.第四方面,本发明实施例提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如本发明第一方面实施例所述无人驾驶adas控制器的测试方法的步骤。
23.本发明的有益效果是:在多机联合下构建场景模型、传感器模型、车辆模型和驾驶模型,兼容不同性能传感器的仿真模拟,对adas控制器融合、决策和控制功能进行快速验证,支持构建驾驶模拟器用于偶尔模拟人工干预的场景;实现一种无人驾驶adas控制器的同步检测的实时结果展示与最终的可视化对比报表输出,有效节省不同场景下adas控制器检测的效率与成本。
附图说明
24.图1为本发明实施例的无人驾驶adas控制器的测试方法流程框图;
25.图2为本发明实施例的无人驾驶adas控制器的测试装置硬件环境结构图;
26.图3为本发明实施例的无人驾驶adas控制器的测试装置的功能流程图;
27.图4为本发明实施例的电子设备示意图;
28.图5为本发明实施例的计算机可读存储介质示意图。
具体实施方式
29.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.图1为本发明实施例提供一种无人驾驶adas控制器的测试方法,包括:
31.步骤s1、构建驾驶场景模型、车载传感器模型、车辆模型,并构建高级驾驶辅助系统adas控制器;
32.具体的,本实施例中,在第一上位机pc1上基于simulink构建驾驶场景模型和车载传感器模型,构建多驾驶场景模型的场景库,满足不同场景下的测试需求,其中车载传感器模型包含带识别功能与不带识别功能的车载传感器(毫米波雷达、激光雷达、智能摄像头等),第二上位机pc2上基于carsim构建车辆模型,基于nvidia drive px2构建的adas控制器开发带识别模式和不带识别模式,其中不带识别模式处理带识别功能的传感器输出数据,带识别模式处理不带识别功能的传感器输出的原始图像,例如图片和3d点云数据,满足不同传感器的模型仿真需求。
33.pc1、pc2和基于nvidia drive px2构建的adas控制器在同一局域网下以udp协议进行通信,adas控制器与pc2使用can协议(通过can卡)进行通信,驾驶模拟器采用usb协议与pc2进行通信。其中,第一上位机与第二上位机采用udp协议传输车辆位姿信息、滚阻风阻信息、转向油门刹车信息等,第一上位机与驾驶模拟器采用udp协议传输传感器检测结果,第一上位机与adas控制器采用udp协议传输车载传感器模型的原始数据,第二上位机与adas控制器采用can协议进行车辆控制信号通信。
34.步骤s2、运行驾驶场景模型、车载传感器模型、车辆模型,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息;
35.pc1运行simulink,构建场景模型和传感器模型同时播放场景用于界面,pc2运行carsim,显示车辆模型,开发上位机进行adas控制器性能测试分析。
36.步骤s3、获取adas控制器输出至车辆模型的每一帧报文信息,以获取所述输出信息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
37.开发上位机进行adas控制器性能测试分析(与在实车情况下adas控制器测试结果对比),上位机输出实时对比分析可视化展示与对比分析报告。
38.上位机端效果实时直观对比:
39.(1)上位机通过can卡与adas控制器连接
40.(2)实时读取每一帧can报文信息,包含adas控制器融合、决策和控制功能信息,与真值数据(在相同条件下已验证的adas控制器输出性能好的数据)进行逐帧的性能对比。
41.结果可视化报表:多机联合仿真系统运行结束后,上位机程序自动执行可视化报表生成函数,将adas控制器真值数据进行对比验证,将每一帧的各类属性的误差数以及漏检测数和成功数进行统计,以图表形式反馈,图表功能调用python中pyecharts模块(echarts一个使用javascript实现的开源可视化库)中的图标库实现,最终调用python中reportlab模块将形成的数据对比图片生成pdf文件保存即为最终的结果可视化报表。
42.本发明实施例还提供一种无人驾驶adas控制器的测试装置,基于上述实施例中的无人驾驶adas控制器的测试方法,如图2、图3中所示,包括:
43.第一上位机(图中主机pc1),用于基于simulink构建驾驶场景模型、车载传感器模型;
44.第二上位机(图中主机pc2),用于基于carsim构建车辆模型,基于nvidia drive px2构建高级驾驶辅助系统adas控制器;
45.开发上位机,获取第一上位机运行simulink、第二上位机运行carsim时,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
46.本实施例中,如图3中所示,本实施例的无人驾驶adas控制器的测试装置的测试步骤包括:
47.硬件环境设定:第一上位机pc1,第二上位机pc2,罗技g29驾驶模拟器,基于nvidia drive px2构建的adas控制器,电源,线束,支持can和canfd的pcan-usb pro设备,上位机等硬件组成。
48.软件环境构建:第一上位机pc1基于simulink构建场景模型和传感器模型,其中传感器模型包含带识别功能与不带识别功能的车载传感器(毫米波雷达、激光雷达、智能摄像头等),第二上位机pc2基于carsim构建车辆模型,基于nvidia drive px2构建的adas控制器开发带识别和不带识别两种模式,其中不带识别模式处理带识别功能的传感器输出数据,带识别模式处理不带识别功能的传感器输出的原始图像,例如图片和3d点云数据,满足不同传感器的模型仿真需求。
49.软件硬件的安装:pc1、pc2和基于nvidia drive px2构建的adas控制器在同一局域网下以udp协议进行通信,adas控制器与pc2使用can协议(通过can卡)进行通信,基于罗技g29的驾驶模拟器采用usb协议与pc2进行通信。pc1运行simulink,构建场景模型和传感器模型同时播放场景用于界面,pc2运行carsim,显示车辆模型,开发上位机进行adas控制器性能测试分析(与在实车情况下adas控制器测试结果对比),上位机输出实时对比分析可视化展示与对比分析报告。
50.请参阅图4,图4为本发明实施例提供的电子设备的实施例示意图。如图4所示,本发明实施例提了一种电子设备500,包括存储器510、处理器520及存储在存储器520上并可在处理器520上运行的计算机程序511,处理器520执行计算机程序511时实现以下步骤:
51.步骤s1、构建驾驶场景模型、车载传感器模型、车辆模型,并构建高级驾驶辅助系统adas控制器;
52.步骤s2、运行驾驶场景模型、车载传感器模型、车辆模型,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息;
53.步骤s3、获取adas控制器输出至车辆模型的每一帧报文信息,以获取所述输出信息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
54.请参阅图5,图5为本发明实施例提供的一种计算机可读存储介质的实施例示意图。如图5所示,本实施例提供了一种计算机可读存储介质600,其上存储有计算机程序611,该计算机程序611被处理器执行时实现如下步骤:
55.步骤s1、构建驾驶场景模型、车载传感器模型、车辆模型,并构建高级驾驶辅助系统adas控制器;
56.步骤s2、运行驾驶场景模型、车载传感器模型、车辆模型,基于adas控制器获取车载传感器采集的原始数据,以使adas控制器基于车载传感器采集的原始数据生成的输出信息;
57.步骤s3、获取adas控制器输出至车辆模型的每一帧报文信息,以获取所述输出信
息,并与相同驾驶场景模型的adas控制器输出的真值数据进行逐帧对比。
58.需要说明的是,在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述的部分,可以参见其它实施例的相关描述。
59.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
60.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式计算机或者其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
61.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
62.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
63.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
64.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。