一种基于rfid和9dof数据的agv导航系统及方法
技术领域
1.本发明属于自动控制领域,尤其涉及一种agv导航系统及方法。
背景技术:
2.随着科学技术的发展,用于物料运输的自动导引小车(automatic guided vehicle,agv)已经成为企业内部物流、智能工厂、先进物流的重要设备,能够替代部分人力,提高生产效率,增加企业的收益,有利于实现自动化、信息化和智能化。
3.在agv的实际应用中,常见的电磁感应导引、磁带导引、光学导引存在路线固定,变动成本高,对周围环境敏感的问题;射频识别系统rfid受电路电压变化带来的干扰,导航精度不高。
技术实现要素:
4.本发明要克服现有射频识别技术的上述不足,提供一种融合rfid和9dof数据的agv导航系统及方法。
5.本发明采用9dof中的加速度计、陀螺仪获取agv的姿态和航向,采用磁力计修正陀螺仪的偏差,采用rfid的读写器读取电子标签的编号信息,获取agv的运动方式,采用双电源系统,其中的小电池单独为rfid读写器供电,可实现在未通电时使大电池与小电池形成物理隔离,减弱电路电压变化引起的干扰,有效增加射频识别系统rfid的识别距离并提高准确性,运行时呈现优良的性能。为实现上述目的,本发明采用如下技术方案:
6.第一方面,本发明提供了一种融合rfid和9dof数据的agv导航系统,包括布置于agv行驶路径转角处的rfid电子标签和车载设备。所述车载设备包括双电源系统、电机组、主控芯片、rfid读写器和9dof;所述双电源系统中的rfid读写器连接小电池,小电池单独为rfid读写器供电,大电池连接主控芯片和电机组;所述rfid读写器连接主控芯片,将接收到的电子标签的编号信息传输给主控芯片;所述9dof将agv的姿态、速度和位置信息传输给主控芯片;所述主控芯片接收rfid读写器输入的电子标签的数据信息、以及9dof传入的姿态、速度和位置信息,下达指令给电机组,控制agv的运动;
7.将agv行驶的区域网格化,电子标签置于agv行驶路径的转角处,每个电子标签具有唯一的编号并储存在主控芯片的数据库中;数据库记载agv经过每个电子标签要执行的特定运动方式;
8.所述rfid读写器发射频率为125khz的射频信号,使电子标签产生感应电流,电子标签的编号信息通过天线发送到rfid读写器,rfid读写器将编号信息传输给主控芯片;
9.所述主控芯片接收rfid读写器输入的电子标签的编号,然后通过数据库确认agv接下来的运动方式;
10.所述主控芯片根据9dof输入姿态、速度、位置和方向信息结合agv接下来的运动方式信息,给电机组下达指令,到达目标姿态。
11.所述电机组包括左电机、右电机和电机驱动,电机驱动接收主控芯片下达的指令,
驱动左电机和右电机实现运动控制;
12.优选地,所述双电源系统的小电池和大电池连接供电模组和充电接口。
13.优选地,所述9dof包括陀螺仪、加速度计和磁力计,陀螺仪、加速度计确定agv的姿态、速度和位置信息,磁力计修正误差和确认方向,再将数据发送给主控芯片。
14.优选地,双电源系统具有充电智能管理的功能,可根据电量情况,智能分配充电电流。
15.优选地,大电池和小电池由一个充电接口充电。所述磁力计可以根据地球不同纬度的磁场环境校准参数,修正误差,从而调整和确认方向。
16.第二方面,本发明提供了一种基于rfid和9dof数据的agv导航方法,包括如下步骤:
17.(1)将区域网格化,在agv行驶路径的转角处放置电子标签,每个电子标签具有唯一的编号并储存在主控芯片的数据库中;数据库记载agv经过每个电子标签要执行的特定运动方式;
18.(2)agv上的9dof测量加速度、角速度、磁场方向等数据,输出agv的位姿、速度、位置和方向信息,实现对agv的定位;
19.(3)在agv接近电子标签时,rfid读写器接收到电子标签发送的编号信息,然后传输给主控芯片,主控芯片根据数据库确定agv接下来的运动方式信息;
20.(4)主控芯片根据输入的agv的位姿、速度、位置、方向信息以及接下来的运动方式信息,输出指令给电机组,使agv沿着事先规划好的路径行驶。
21.本发明采用双电源系统供电,未通电时,大电池与小电池形成物理隔离,减弱电压变化对rfid的干扰。
22.本发明与现有技术相比,具有如下优点:
23.1、本发明提供了一种基于rfid和9dof数据的agv导航系统及方法,该系统使用双电源系统供电,未通电时,大电池与小电池形成物理隔离,可减弱电压变化对rfid的干扰,有效增加rfid的识别距离并提高其精确性和稳定性;
24.2、采用一个充电接口同时为双电源系统充电,节省充电接口,操作方便;
25.3、双电源系统具有充电智能管理的功能,可根据电量情况,智能分配充电电流;4、该系统使用rfid电子标签作为路径标记,使路线铺设变得简单灵活,能有效节约成本,提高铺设效率,增强适应性;
26.5、拥有自适应系统,9dof能够根据地球不同纬度的磁场环境变化校准自身参数,实现更精准地执行预定轨迹;
27.6、基于rfid和9dof数据的agv导航方法,导航精度高,系统适应性强。。
附图说明
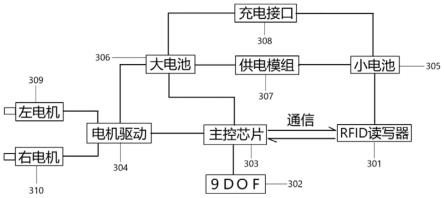
28.图1是本发明的一种基于rfid和9dof数据的agv导航系统的示意性框图;
29.图2是本发明提供的一种基于rfid和9dof数据的agv导航方法的示意流程图;
具体实施方式
30.下面结合附图与具体实施方式对本发明做进一步描述。
31.本发明提供的一种基于rfid和9dof数据的agv导航系统,该系统包括布置于agv行驶路径转角处的电子标签和车载设备;每个电子标签具有唯一的编号并储存在主控芯片的数据库中;数据库记载agv经过每个电子标签要执行的特定运动方式;
32.请参阅图1,车载设备包括:rfid读写器301、9dof302、主控芯片303、电机驱动304、小电池305、大电池306、供电模组307、充电接口308、左电机309、右电机310。
33.rfid读写器301发射频率为125khz的射频信号,使电子标签产生感应电流,电子标签的编号信息通过天线发送到rfid读写器301,rfid读写器301将编号信息传输给主控芯片303。
34.主控芯片303接收rfid读写器301输入的电子标签的编号信息,然后通过数据库确认agv接下来的运动方式;
35.9dof302包括陀螺仪、加速度计和磁力计,陀螺仪、加速计确定agv的姿态、速度和位置信息,磁力计修正误差和确认方向,之后将数据发送给主控芯片303;主控芯片303根据9dof302输入姿态、速度、位置和方向信息并结合接下来的运动方式信息,给电机驱动304下达指令;电机驱动304接收主控芯片303下达的指令,驱动左电机309和右电机310,实现agv到达目标姿态,向着目标方向行驶;rfid读写器301连接小电池305,由小电池305单独供电;
36.小电池305连接供电模组307,供电模组307连接大电池306,未通电时,大电池与小电池形成物理隔离;
37.大电池306为主控芯片303、电机驱动304、左电机309和右电机310供电;大电池306和小电池305由一个充电接口308充电;
38.请参阅图2,图2是本发明实施例提供的一种基于rfid和9dof数据的agv导航方法的示意流程图,包括:
39.s101,将区域网格化,在agv行驶路径的转角处放置电子标签,每个电子标签具有唯一的编号并储存在主控芯片的数据库中;数据库记载agv经过每个电子标签要执行的特定运动方式信息;
40.s102,agv上的9dof测量加速度、角速度、磁场方向等数据,输出agv的位姿、速度、位置和方向信息,实现对agv的定位;
41.s103,在agv接近电子标签时,rfid读写器接收到电子标签发送的电子编号,发送给主控芯片,主控芯片根据数据库确定agv接下来的运动方式;
42.s104,主控芯片根据输入的agv的位姿、速度、位置、方向信息以及接下来的运动方式信息,输出指令给电机驱动,使agv沿着事先规划好的路径行驶。
43.本发明使用双电源系统供电,未通电时,大电池与小电池形成物理隔离以减弱电压变化对rfid的干扰,有效增加了rfid的识别距离并提高稳定性;采用一个充电接口同时为双电源系统充电,节省充电接口,操作方便;双电源系统具有充电智能管理的功能,可根据电量情况,智能分配充电电流;该系统使用rfid电子标签作为路径标记,使路线铺设变得简单灵活,能有效节约成本,提高铺设效率,增强适应性;拥有自适应系统,9dof能够根据地球不同纬度的磁场环境变化校准自身参数,实现更精准地执行预定轨迹;基于rfid和9dof数据的agv导航方法,导航精度高,系统适应性强。
44.最后,需要注意的是以上所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获
得的所有其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
