1.本发明涉及清洁机器人技术领域,具体为基于深度学习的智能清洁机器人贴边清洁系统及方法。
背景技术:
2.在日常生活中,对于小块的玻璃,人们一般使用抹布进行清洁擦洗,而大块玻璃以及窗户的外立面,通常使用杆式玻璃清洁擦进行清洁擦洗,然而,用杆式玻璃清洁擦清洁玻璃时,手臂容易疲劳,而且在擦拭户外玻璃时,尤其对于高层建筑,操作过程十分危险,因而市场上出现了一种智能清洁机器人,它能够代替人力,节省了人工劳动的强度。
3.但是目前的玻璃清洁机器人在清洁时,随意性大,无法将玻璃的每个位置都给清洁到,进而使得清洁后的玻璃仍然会有污渍,没有对此缺陷进行相应的改进。
技术实现要素:
4.针对现有技术的不足,本发明提供了基于深度学习的智能清洁机器人贴边清洁系统及方法,解决了目前的玻璃清洁机器人在清洁时,随意性大,无法将玻璃的每个位置都给清洁到,进而使得清洁后的玻璃仍然会有污渍的问题。
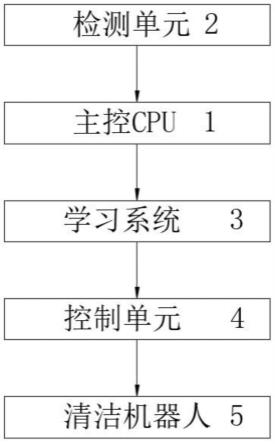
5.为实现以上目的,本发明通过以下技术方案予以实现:基于深度学习的智能清洁机器人贴边清洁系统,包括主控cpu和检测单元、学习系统、控制单元以及清洁机器人,所述检测单元与主控cpu之间通过无线连接,所述主控cpu与学习系统电性连接,所述学习系统与控制单元之间电性连接,之后控制单元通过无线远程控制清洁机器人进行工作。
6.所述检测单元对清洁机器人的工作状态以及被清洁的玻璃进行在线检测工作,所述学习系统通过自主学习清洗动作步骤,再结合检测单元所监测的信息,清洁机器人自动选择相应的清洁动作,之后通过控制单元来控制清洁机器人的对玻璃进行清洁工作。
7.进一步的,所述检测单元包括有超声波传感模块和姿态传感模块、压力传感模块、灰尘传感模块、速度传感模块、信号接收模块以及数据阈值模块,所述超声波传感模块用于检测清洁机器人与玻璃上障碍物之间的距离,所述姿态传感模块用于检测清洁机器人工作的姿态状况,所述压力传感模块用于检测清洁机器人与玻璃之间的吸附压力,保证清洁机器人不会压坏玻璃同时也不会从玻璃上脱落下来,所述灰尘传感模块用于检测玻璃上的灰尘,判断玻璃清洁后的洁净度,所述速度传感模块用于检测清洁机器人清洁时的行走速度,所述信号接收模块分别对超声波传感模块和姿态传感模块、压力传感模块、灰尘传感模块以及速度传感模块检测的信息进行采集接收。
8.进一步的,所述姿态传感模块检测的姿态状况包括清洁角度判定、清洁位置判定、清洁路线、在传感运行状态下,自动校准因自身特性、电磁以及环境的变化引起的角度漂移、实现参数读取和备份。
9.进一步的,所述数据阈值模块设置清洁机器人清洁中运行中的参数,使得超声波传感模块检测到预设的参数时,清洁机器人会自动改变行走路线,防止清洁机器人发生碰
撞情况,姿态传感模块会根据预设的参数,使得清洁机器人在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块会根据预设的参数,使得清洁机器人保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人在清洁过程中的稳定性,同时不会对玻璃造成伤害。
10.进一步的,所述学习系统包括有动作元模块和组合动作元模块、规则库、规划模块以及学习机制模块,所述动作元模块为清洁机器人在清洁过程中每一个清洁动作,所述组合动作元模块对动作元模块中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库中组成一个规则储存库,规划模块中用于预设清洁机器人遇到清洗障碍时所需要做出相应的措施,所述学习机制模块能够使清洁机器人根据规划模块中预设的规则进行清洁,并且做出相应的动作措施。
11.进一步的,所述控制单元包括有行走控制模块和转向控制模块、负压控制模块、清洁控制模块以及速度控制模块,所述行走控制模块用于控制清洁机器人的行走路线,便于对玻璃上各个位置进行清洁工作,所述转向控制模块用于控制清洁机器人的转向功能,当清洁机器人遇到障碍物时能够自动转向,避免发生碰撞,所述负压控制模块用于控制清洁机器人与玻璃之间的负压值,使其在预设的恒定负压范围值内,所述清洁控制模块用于控制清洁机器人对玻璃上的污渍进行清洁工作,所述速度控制模块用于控制清洁机器人在清洁玻璃过程中,所行走的速度。
12.进一步的,所述转向控制模块转向包括左转向和右转向、斜转向以及后退转向,转向均通过转向电机进行控制。
13.进一步的,基于深度学习的智能清洁机器人贴边清洁方法,包括权利要其方法包括以下步骤:
14.s1、事先在动作元模块中预设好在清洁过程中每一个清洁动作,组合动作元模块对动作元模块中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库中组成一个规则储存库,规划模块中预设清洁机器人遇到清洗障碍时所需要做出相应的措施,学习机制模块能够使清洁机器人根据规划模块中预设的规则进行清洁,并且做出相应的动作措施;
15.s2、在数据阈值模块设置清洁机器人清洁中运行中的参数,使得超声波传感模块检测到预设的参数时,清洁机器人会自动改变行走路线,防止清洁机器人发生碰撞情况,姿态传感模块会根据预设的参数,使得清洁机器人在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块会根据预设的参数,使得清洁机器人保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人在清洁过程中的稳定性,同时不会对玻璃造成伤害;
16.s3、超声波传感模块检测清洁机器人与玻璃上障碍物之间的距离,姿态传感模块检测清洁机器人工作的姿态状况,压力传感模块检测清洁机器人与玻璃之间的吸附压力,保证清洁机器人不会压坏玻璃同时也不会从玻璃上脱落下来,灰尘传感模块检测玻璃上的灰尘,判断玻璃清洁后的洁净度,速度传感模块检测清洁机器人清洁时的行走速度,信号接收模块分别对超声波传感模块和姿态传感模块、压力传感模块、灰尘传感模块以及速度传感模块检测的信息进行采集接收,清洁机器人根据这些采集的信息和学习的信息对玻璃进行清洁工作。
17.有益效果
18.本发明提供了基于深度学习的智能清洁机器人贴边清洁系统及方法,与现有技术相比具备以下有益效果:
19.1、该基于深度学习的智能清洁机器人贴边清洁系统及方法,通过预设好清洁动作和清洁组合动作,使得清洁机器人能够自主学习清洁动作,进而当清洁机器人遇到清洁障碍问题时,能够自动的转换为相应的清洁动作使其完成对玻璃的清洁工作,提高了工作效率。
20.2、该基于深度学习的智能清洁机器人贴边清洁系统及方法,通过多重传感的检测,保证清洁机器人在清洁过程中的稳定性,不会发生脱落情况,同时能够将玻璃上每个角落都给清洁到,而且能够将玻璃给清洁干净。
附图说明
21.图1为本发明的原理框图;
22.图2为本发明检测单元的原理框图;
23.图3为本发明学习系统的原理框图;
24.图4为本发明控制单元的原理框图。
25.图中:1、主控cpu;2、检测单元;21、超声波传感模块;22、姿态传感模块;23、压力传感模块;24、灰尘传感模块;25、速度传感模块;26、信号接收模块;27、数据阈值模块;3、学习系统;31、动作元模块;32、组合动作元模块;33、规则库;34、规划模块;35、学习机制模块;4、控制单元;41、行走控制模块;42、转向控制模块;43、负压控制模块;44、清洁控制模块;45、速度控制模块;5、清洁机器人。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.请参阅图1,本发明提供技术方案,基于深度学习的智能清洁机器人贴边清洁系统,包括主控cpu1和检测单元2、学习系统3、控制单元4以及清洁机器人5,检测单元2与主控cpu1之间通过无线连接,主控cpu1与学习系统3电性连接,学习系统3与控制单元4之间电性连接,之后控制单元4通过无线远程控制清洁机器人5进行工作,检测单元2对清洁机器人5的工作状态以及被清洁的玻璃进行在线检测工作,学习系统3通过自主学习清洗动作步骤,再结合检测单元2所监测的信息,清洁机器人5自动选择相应的清洁动作,之后通过控制单元4来控制清洁机器人5的对玻璃进行清洁工作。
28.请参阅图2,本发明实施例中,检测单元2包括有超声波传感模块21和姿态传感模块22、压力传感模块23、灰尘传感模块24、速度传感模块25、信号接收模块26以及数据阈值模块27,超声波传感模块21用于检测清洁机器人5与玻璃上障碍物之间的距离,姿态传感模块22用于检测清洁机器人5工作的姿态状况,压力传感模块23用于检测清洁机器人5与玻璃之间的吸附压力,保证清洁机器人5不会压坏玻璃同时也不会从玻璃上脱落下来,灰尘传感模块24用于检测玻璃上的灰尘,判断玻璃清洁后的洁净度,速度传感模块25用于检测清洁
机器人5清洁时的行走速度,信号接收模块26分别对超声波传感模块21和姿态传感模块22、压力传感模块23、灰尘传感模块24以及速度传感模块25检测的信息进行采集接收,姿态传感模块22检测的姿态状况包括清洁角度判定、清洁位置判定、清洁路线、在传感运行状态下,自动校准因自身特性、电磁以及环境的变化引起的角度漂移、实现参数读取和备份,数据阈值模块27设置清洁机器人5清洁中运行中的参数,使得超声波传感模块21检测到预设的参数时,清洁机器人5会自动改变行走路线,防止清洁机器人5发生碰撞情况,姿态传感模块22会根据预设的参数,使得清洁机器人5在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块23会根据预设的参数,使得清洁机器人5保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人5在清洁过程中的稳定性,同时不会对玻璃造成伤害。
29.请参阅图3,本发明实施例中,学习系统3包括有动作元模块31和组合动作元模块32、规则库33、规划模块34以及学习机制模块35,动作元模块31为清洁机器人5在清洁过程中每一个清洁动作,组合动作元模块32对动作元模块31中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库33中组成一个规则储存库,规划模块34中用于预设清洁机器人5遇到清洗障碍时所需要做出相应的措施,学习机制模块35能够使清洁机器人5根据规划模块34中预设的规则进行清洁,并且做出相应的动作措施。
30.请参阅图4,本发明实施例中,控制单元4包括有行走控制模块41和转向控制模块42、负压控制模块43、清洁控制模块44以及速度控制模块45,行走控制模块41用于控制清洁机器人5的行走路线,便于对玻璃上各个位置进行清洁工作,转向控制模块42用于控制清洁机器人5的转向功能,当清洁机器人5遇到障碍物时能够自动转向,避免发生碰撞,负压控制模块43用于控制清洁机器人5与玻璃之间的负压值,使其在预设的恒定负压范围值内,清洁控制模块44用于控制清洁机器人5对玻璃上的污渍进行清洁工作,速度控制模块45用于控制清洁机器人5在清洁玻璃过程中,所行走的速度,转向控制模块42转向包括左转向和右转向、斜转向以及后退转向,转向均通过转向电机进行控制。
31.本发明实施例中,基于深度学习的智能清洁机器人贴边清洁方法,包括权利要其方法包括以下步骤:
32.s1、事先在动作元模块31中预设好在清洁过程中每一个清洁动作,组合动作元模块32对动作元模块31中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库33中组成一个规则储存库,规划模块34中预设清洁机器人5遇到清洗障碍时所需要做出相应的措施,学习机制模块35能够使清洁机器人5根据规划模块34中预设的规则进行清洁,并且做出相应的动作措施;
33.s2、在数据阈值模块27设置清洁机器人5清洁中运行中的参数,使得超声波传感模块21检测到预设的参数时,清洁机器人5会自动改变行走路线,防止清洁机器人5发生碰撞情况,姿态传感模块22会根据预设的参数,使得清洁机器人5在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块23会根据预设的参数,使得清洁机器人5保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人5在清洁过程中的稳定性,同时不会对玻璃造成伤害;
34.s3、超声波传感模块21检测清洁机器人5与玻璃上障碍物之间的距离,姿态传感模块22检测清洁机器人5工作的姿态状况,压力传感模块23检测清洁机器人5与玻璃之间的吸
附压力,保证清洁机器人5不会压坏玻璃同时也不会从玻璃上脱落下来,灰尘传感模块24检测玻璃上的灰尘,判断玻璃清洁后的洁净度,速度传感模块25检测清洁机器人5清洁时的行走速度,信号接收模块26分别对超声波传感模块21和姿态传感模块22、压力传感模块23、灰尘传感模块24以及速度传感模块25检测的信息进行采集接收,清洁机器人5根据这些采集的信息和学习的信息对玻璃进行清洁工作。
35.同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
36.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。