技术特征:
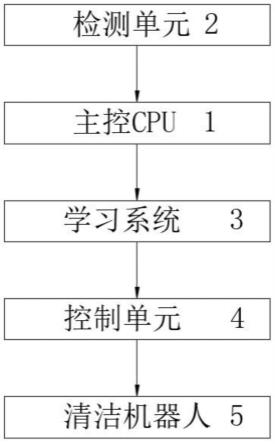
1.基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:包括主控cpu(1)和检测单元(2)、学习系统(3)、控制单元(4)以及清洁机器人(5),所述检测单元(2)与主控cpu(1)之间通过无线连接,所述主控cpu(1)与学习系统(3)电性连接,所述学习系统(3)与控制单元(4)之间电性连接,之后控制单元(4)通过无线远程控制清洁机器人(5)进行工作;所述检测单元(2)对清洁机器人(5)的工作状态以及被清洁的玻璃进行在线检测工作,所述学习系统(3)通过自主学习清洗动作步骤,再结合检测单元(2)所监测的信息,清洁机器人(5)自动选择相应的清洁动作,之后通过控制单元(4)来控制清洁机器人(5)的对玻璃进行清洁工作。2.根据权利要求1所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述检测单元(2)包括有超声波传感模块(21)和姿态传感模块(22)、压力传感模块(23)、灰尘传感模块(24)、速度传感模块(25)、信号接收模块(26)以及数据阈值模块(27),所述超声波传感模块(21)用于检测清洁机器人(5)与玻璃上障碍物之间的距离,所述姿态传感模块(22)用于检测清洁机器人(5)工作的姿态状况,所述压力传感模块(23)用于检测清洁机器人(5)与玻璃之间的吸附压力,保证清洁机器人(5)不会压坏玻璃同时也不会从玻璃上脱落下来,所述灰尘传感模块(24)用于检测玻璃上的灰尘,判断玻璃清洁后的洁净度,所述速度传感模块(25)用于检测清洁机器人(5)清洁时的行走速度,所述信号接收模块(26)分别对超声波传感模块(21)和姿态传感模块(22)、压力传感模块(23)、灰尘传感模块(24)以及速度传感模块(25)检测的信息进行采集接收。3.根据权利要求2所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述姿态传感模块(22)检测的姿态状况包括清洁角度判定、清洁位置判定、清洁路线、在传感运行状态下,自动校准因自身特性、电磁以及环境的变化引起的角度漂移、实现参数读取和备份。4.根据权利要求2所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述数据阈值模块(27)设置清洁机器人(5)清洁中运行中的参数,使得超声波传感模块(21)检测到预设的参数时,清洁机器人(5)会自动改变行走路线,防止清洁机器人(5)发生碰撞情况,姿态传感模块(22)会根据预设的参数,使得清洁机器人(5)在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块(23)会根据预设的参数,使得清洁机器人(5)保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人(5)在清洁过程中的稳定性,同时不会对玻璃造成伤害。5.根据权利要求1所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述学习系统(3)包括有动作元模块(31)和组合动作元模块(32)、规则库(33)、规划模块(34)以及学习机制模块(35),所述动作元模块(31)为清洁机器人(5)在清洁过程中每一个清洁动作,所述组合动作元模块(32)对动作元模块(31)中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库(33)中组成一个规则储存库,规划模块(34)中用于预设清洁机器人(5)遇到清洗障碍时所需要做出相应的措施,所述学习机制模块(35)能够使清洁机器人(5)根据规划模块(34)中预设的规则进行清洁,并且做出相应的动作措施。6.根据权利要求1所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述控制单元(4)包括有行走控制模块(41)和转向控制模块(42)、负压控制模块(43)、清洁
控制模块(44)以及速度控制模块(45),所述行走控制模块(41)用于控制清洁机器人(5)的行走路线,便于对玻璃上各个位置进行清洁工作,所述转向控制模块(42)用于控制清洁机器人(5)的转向功能,当清洁机器人(5)遇到障碍物时能够自动转向,避免发生碰撞,所述负压控制模块(43)用于控制清洁机器人(5)与玻璃之间的负压值,使其在预设的恒定负压范围值内,所述清洁控制模块(44)用于控制清洁机器人(5)对玻璃上的污渍进行清洁工作,所述速度控制模块(45)用于控制清洁机器人(5)在清洁玻璃过程中,所行走的速度。7.根据权利要求6所述的基于深度学习的智能清洁机器人贴边清洁系统,其特征在于:所述转向控制模块(42)转向包括左转向和右转向、斜转向以及后退转向,转向均通过转向电机进行控制。8.基于深度学习的智能清洁机器人贴边清洁方法,其特征在于:包括权利要求1~7任意一项的清洁系统,其方法包括以下步骤:s1、事先在动作元模块(31)中预设好在清洁过程中每一个清洁动作,组合动作元模块(32)对动作元模块(31)中各种清洁动作进行互相组合,使其能够应对不同情况下,所做出相应的清洁动作,这些动作在规则库(33)中组成一个规则储存库,规划模块(34)中预设清洁机器人(5)遇到清洗障碍时所需要做出相应的措施,学习机制模块(35)能够使清洁机器人(5)根据规划模块(34)中预设的规则进行清洁,并且做出相应的动作措施;s2、在数据阈值模块(27)设置清洁机器人(5)清洁中运行中的参数,使得超声波传感模块(21)检测到预设的参数时,清洁机器人(5)会自动改变行走路线,防止清洁机器人(5)发生碰撞情况,姿态传感模块(22)会根据预设的参数,使得清洁机器人(5)在预设的路线进行清洁工作,将玻璃上每个角落都给清洁到,压力传感模块(23)会根据预设的参数,使得清洁机器人(5)保证恒定范围内的吸力贴附在玻璃上,保证清洁机器人(5)在清洁过程中的稳定性,同时不会对玻璃造成伤害;s3、超声波传感模块(21)检测清洁机器人(5)与玻璃上障碍物之间的距离,姿态传感模块(22)检测清洁机器人(5)工作的姿态状况,压力传感模块(23)检测清洁机器人(5)与玻璃之间的吸附压力,保证清洁机器人(5)不会压坏玻璃同时也不会从玻璃上脱落下来,灰尘传感模块(24)检测玻璃上的灰尘,判断玻璃清洁后的洁净度,速度传感模块(25)检测清洁机器人(5)清洁时的行走速度,信号接收模块(26)分别对超声波传感模块(21)和姿态传感模块(22)、压力传感模块(23)、灰尘传感模块(24)以及速度传感模块(25)检测的信息进行采集接收,清洁机器人(5)根据这些采集的信息和学习的信息对玻璃进行清洁工作。
技术总结
本发明公开了基于深度学习的智能清洁机器人贴边清洁系统及方法,本发明涉及清洁机器人技术领域,包括主控CPU和检测单元、学习系统、控制单元以及清洁机器人,所述检测单元与主控CPU之间通过无线连接,所述主控CPU与学习系统电性连接,所述学习系统与控制单元之间电性连接,之后控制单元通过无线远程控制清洁机器人进行工作。该基于深度学习的智能清洁机器人贴边清洁系统及方法,通过预设好清洁动作和清洁组合动作,使得清洁机器人能够自主学习清洁动作,进而当清洁机器人遇到清洁障碍问题时,能够自动的转换为相应的清洁动作使其完成对玻璃的清洁工作,提高了工作效率。提高了工作效率。提高了工作效率。
技术研发人员:皮从明 张永明
受保护的技术使用者:净豹智能机器人(台州)有限公司
技术研发日:2022.04.19
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。