1.本发明涉及人工晶状体系统、人工晶状体和睫状体植入物。因此,本发明尤其基于人工晶状体的领域,尤其是生物力学和/或机电可适应性调节人工晶状体的领域。
背景技术:
2.在现有技术中,已知具有生物力学适应性调节性的人工晶状体(iol),即iol的屈光效果能够通过借助于肌肉组织施加机械力来变化并且能够适配于期望的适应性调节。
3.iol通常植入眼睛的囊袋中,因为这与其他植入部位相比并发症率低,并且所需手术技术成熟,其中,存在这种生物力学iol的大量设计。现有技术中已知的设计对于适应性调节使用自然触发力,即睫状体或睫状肌的直径变化,仅仅间接地使用。相反,决定性的力经由带状纤维传递到弹性的囊袋上。
4.囊袋的弹性在不同的眼睛或患者中个体极其不同,并且例如能够由于在白内障手术后的伤口愈合过程(例如纤维化)和通过进一步的细胞生长(继发性白内障)而变化。继发性白内障的治疗也会变化囊袋,并且尤其变化其弹性。因此,通常难以找到普遍有效的、功能良好的生物力学装置,所述装置同样适合于人群的许多个体差异,并且附加地同样适合于为该功能所用的生物材料的时间变化。更糟糕的是:为该功能所用的生物材料的特性通常无法在白内障手术之前进行测量,这就是为什么无法适配于个体条件的原因。
5.此外,传统的iol植入物通常必须扩张原始的囊袋,以减少/避免纤维化,这需要大的植入物体积并使小切口尺寸变得困难。此外,存在生物力学适应性调节的iol的设计,所述设计在囊袋外以与睫状肌直接接触的方式注入到眼沟中或眼沟附近中。在此,睫状肌的力被直接转化为机械运动或液压变形,以产生生物力学植入物的适应性调节。所述植入物通常与虹膜接触或执行相对于关键组织的相对运动,由此例如会将色素从虹膜中释放出来,所述色素然后例如会阻碍眼液的排出。由于这种影响和其他影响,所谓的眼沟iol显示出并发症率的增加。
6.例如,us 2013/226293 a1描述了一种能够直接机械与睫状肌连接的电活性iol。因此,这种iol无法实现完全植入囊袋中。
7.此外,wo 2015/138507 a1公开一种用于植入睫状肌中的传感器单元,其中,传感器单元压力敏感地或肌电图地构造,并且具有用于将信号有源地、无线地传输给光学有效的植入物的微芯片。由于传感器单元设计为是有源的,所以所述传感器单元需要合适的供电装置并且必须相对于其周围环境严密地封装。
8.us 2014/0156000 a1描述一种具有肌电图传感器、处理器和电活性的光学元件的电活性的眼科晶状体。肌电图传感器设计用于:检测睫状肌中的与睫状肌施加的力成比例的电场,并产生对此指示性的传感器信号。睫状肌中的电场的肌电信号通常非常微弱并且还难以与其他的较大肌肉(例如移动眼睛的肌肉)的肌电信号分开,这使可靠地使用所述信号变难。
技术实现要素:
9.本发明的目的是提供一种人工晶状体系统,该人工晶状体系统避免了传统iol固有的缺点。
10.根据本发明,所述目的通过具有相应的独立权利要求的特征的人工晶状体系统、睫状体植入物、人工晶状体和方法来实现。在从属权利要求和说明书中说明了有利的设计方案。
11.在第一方面,本发明涉及一种用于植入眼睛中的人工晶状体系统。人工晶状体系统包括具有无源的睫状体信号元件的睫状体植入物,其中,睫状体植入物设计为并且能够植入眼睛中,使得睫状体信号元件根据眼睛的睫状肌的运动提供睫状体信号。人工晶状体系统还包括人工晶状体,所述人工晶状体具有用于接收睫状体信号的传感器元件。在此,睫状体植入物和人工晶状体彼此分离地构造,并且眼内系统设计用于:根据由传感器元件接收的睫状体信号来控制人工晶状体的屈光效果。
12.在另一方面中,本发明涉及一种用于植入眼睛中的人工晶状体系统的睫状体植入物,其中,睫状体植入物具有无源的睫状体信号元件并设计用于:借助于睫状体信号元件根据眼睛的睫状肌的运动来提供睫状体信号。
13.在另一方面中,本发明涉及一种用于植入眼睛中的人工晶状体系统的人工晶状体,其中,人工晶状体具有用于接收睫状体信号的传感器元件,并且设计用于:根据接收到的睫状体信号控制眼睛的屈光效果。
14.在另一方面中,本发明涉及一种用于将人工晶状体系统植入眼睛中的方法。该方法包括将具有无源的睫状体信号元件的睫状体植入物植入眼睛中,使得睫状体信号元件根据眼睛的睫状肌的运动提供睫状体信号。此外,该方法包括将人工晶状体注入眼睛中,其中,人工晶状体具有用于接收睫状体信号的传感器元件。在此,睫状体植入物和人工晶状体彼此分离地构造,并且眼内系统设计用于:根据由传感器元件接收的睫状体信号控制人工晶状体的屈光效果。
15.在此,就在此描述的发明的意义而言,人工晶状体系统是如下系统,所述系统包括可生物力学和/或电活性适应性调节的人工晶状体(iol)和一个或多个用于检测适应性调节意愿的其他元件,即例如特别是睫状体植入物,并且用于实施iol睫状体植入物的适应性调节。在此,根据本发明的人工晶状体系统(iol系统)多件式地构造,其中,iol系统的多个部分作为单独的部分存在,并且尤其能够彼此分离地植入眼睛中。优选地,iol系统的多个部分、特别是iol和睫状体植入物,不需要彼此之间的直接机械和/或液压和/或“有线”电连接。
16.在此,睫状体植入物是能够植入眼睛中并且至少部分跟随睫状肌运动的植入物。在此,不强制性需要:将睫状体植入物直接植入和/或布置到睫状肌中和/或植入在和/或布置在睫状肌处。相反,只要睫状体植入物至少部分地在植入部位处跟随睫状肌的运动,则睫状体植入物和眼睛的睫状肌之间的间接机械接触也能够是足够的。在此,睫状体植入物优选地实现从睫状肌的运动中生成信号的功能,所述信号指示适应性调节意愿并且能够用于iol或眼睛的适应性调节。在此,睫状体植入物能够以与睫状肌和/或睫状体直接接触的方式布置。例如,睫状体植入物能够以与睫状体直接机械接触的方式布置并且经由睫状体与睫状肌间接接触。
17.在此,睫状体信号元件是无源的信号发生器,所述信号发生器集成到睫状体植入物中和/或与其连接并且设计用于:根据眼睛的睫状肌的运动提供用于适应性调节意愿的指示的信号。这例如能够通过如下方式进行:睫状体信号元件至少部分地跟随睫状肌的运动和/或睫状肌的运动将力施加到睫状体信号元件上和/或以其他方式将影响施加到睫状体信号元件上。在此,睫状体信号元件任选地至少部分地跟随睫状肌运动的事实意味着:睫状体信号元件的偏转或其在眼睛中的位置变化不一定必须以与睫状肌的偏转相同的幅度和/或沿相同的方向进行,所述睫状肌的偏转引起睫状肌的位移和/或位置变化。相反,在此,会足够的是:睫状体信号元件跟随睫状肌的运动,使得睫状体信号元件提供使至少定性地识别睫状肌运动的信号。优选地,通过睫状体信号元件提供的信号与睫状肌的诱发运动的幅度成比例,优选地成正比。
18.根据本发明,睫状体信号元件无源地构造。这意味着:睫状体信号元件不需要能量供应装置,即例如电源。这优选还意味着:睫状体信号元件不具有任何主动生成信号的电路。相反,睫状体信号元件设计用于:通过如下方式无源地生成信号:即例如通过始于睫状体信号元件的电场、特别是静电场和/或(永久和/或静态)磁场而在传感器元件中引起反应。例如,在传感器元件的位置处能够通过如下方式引起信号:睫状体信号元件运动并且由此始于睫状体信号元件的电场和/或磁场在传感器元件的位置处变化。替选地或附加地,例如能够通过如下方式无源地提供信号:即通过睫状体信号元件将入射到睫状体信号元件上的电磁辐射、即例如可见和/或不可见光谱范围中的光至少部分地反射至传感器元件和/或被散射和/或折射和/或衍射。优选地,睫状体植入物具有多个无源的睫状体信号元件,所述睫状体信号元件能够彼此间隔开地以与睫状肌和/或与眼沟机械接触的方式布置。
19.在此,iol是可适应性调节的iol,特别优选地是生物力学和/或可电活性适应性调节的iol。因此,尤其能够借助变化iol在眼睛中的屈光效果来进行眼睛的适应性调节。在此,优选地,能够通过如下方式进行屈光效应的变化:即将机械力施加到iol上或至少施加到iol的一部分上。在此,iol能够优选地构造为,使得其以主动的方式能够引起iol的屈光效果的变化。人工晶状体能够优选地植入眼睛的囊袋中。
20.在此,传感器元件优选地有源地构造并且优选地具有合当的能量供应装置,尤其是诸如电池和/或充电电池和/或光伏元件的电源,所述能量供应装置实现传感器元件的有源运行。在此,传感器元件能够接收睫状体信号并且任选地发射其他的信号。传感器元件优选地能够设计用于:发射信号脉冲并且检测由睫状体信号元件反馈回的回波作为睫状体信号。传感器元件能够优选地设计用于:以光学的信号脉冲的形式和/或作为无线电信号脉冲发射信号脉冲。
21.在此,睫状体信号元件和传感器元件之间的相互作用控制iol的屈光效果的事实意味着:iol的折射效应的变化优选地跟随睫状体信号元件和传感器元件之间的相互作用的变化,特别是睫状体信号元件和传感器元件之间的磁相互作用的变化。以该方式,睫状肌的运动能够优选地用于控制iol的屈光效果,并且尤其优选地用于提供用以变化iol的屈光效果的力。人工晶状体的屈光效果的控制优选地根据眼睛中传感器元件位置处的睫状体信号的变化来进行。
22.本发明提供的优点是:人工晶状体系统能够提供有无源的睫状体植入物。这提供的优点是:不必在睫状体植入物中提供能量存储器,即例如充电电池和/或电池,并且相应
地也不需要更换或替换这种能量存储器。这也提供以下优点:睫状体植入物能够优选地由电无源材料制成并且由此能够将制造耗费和/或生产成本保持得低。这还提供了以下优点:优选生物兼容材料和/或在植入物周围稳定的材料能够用于制造睫状体植入物,由此能够降低并发症的风险。
23.本发明还提供以下优点:iol系统能够植入眼睛中,即在iol系统和虹膜之间不需要直接接触和/或在iol系统、特别是睫状体植入物和眼睛的关键组装之间不需要相对运动。以该方式,能够避免并发症,因为例如不通过iol系统从虹膜中释放色素,进而不形成对于眼液通过iol系统排出的阻碍。因此,与传统的可适应性调节的iol相比,根据本发明的iol系统能够降低并发症率。
24.此外,本发明提供以下优点:能够将可适应性调节的iol以紧凑的构型设计,并且尤其实现将iol植入囊袋中,并且为优选的实施方式,这同样有助于低的并发症率。此外,这由于以下而有利:借助根据本发明的iol系统不需要在睫状体植入物和iol之间的直接机械和/或电连接,并且相应地没有机械连接和没有电导体必须一定从iol穿过囊袋引导至睫状体植入物。这是有利的,因为能够避免或减少对囊袋的损坏和任何随之产生的并发症。此外,这提供了以下优点:仅将iol简单地植入囊袋中就足够,但是不存在将睫状体植入物植入囊袋中的必要性和动机。以该方式,对于将iol植入囊袋中所需的囊袋切口能够保持得小。
25.此外,本发明提供以下优点:不必将基于睫状肌中的电场的肌电信号用于提供睫状体信号,所述肌电信号通常非常微弱并且还被其他电场叠加。这提供的优点是:能够省去肌电信号的耗费的隔离和/或处理,为此通常需要具有大输入电阻的无电位的仪表放大器。
26.睫状体植入物能够优选地植入眼睛中,使得睫状体信号元件与睫状体和/或睫状肌和/或眼沟机械接触。例如,睫状体植入物能够直接固定在睫状体处和/或睫状体中,和/或定位在眼沟中和/或定位在眼沟附近。这提供以下优点:能够以特别可靠的方式实现避免在睫状体植入物和虹膜之间的机械接触。这还提供了以下优点:睫状体信号元件能够以特别可靠的方式跟随睫状肌和/或睫状体的运动,而不会出现例如通过带状纤维和/或囊袋引起的失真。在此,用于植入iol系统的方法优选地进行为,使得睫状体信号元件与睫状肌和/或睫状体和/或眼沟机械接触。
27.睫状体信号元件优选地具有永磁体或构造为永磁体。特别优选地,睫状体信号元件设计用于:借助于磁场在眼睛中的传感器元件的位置处提供睫状体信号。这提供以下优点:能够以简单且可靠的方式借助无源机构、例如借助永磁体提供睫状体信号。此外,这提供以下优点:即周围组织、即例如带状纤维和/或囊袋不引起磁场的任何相关的减弱和/或失真,进而睫状体信号不会以该方式被显着减弱和/或失真。
28.替选地或附加地,睫状体信号元件具有电极和/或压电元件或构造为电极和/或压电元件。尤其优选地,睫状体信号元件设计用于:借助于电场在眼睛中的传感器元件的位置处提供睫状体信号。这提供以下优点:借助简单的机构可靠地能够以无源的方式提供睫状体信号,例如作为电极上的静电电荷的电场提供。替选地或附加地,电场能够借助于压电元件通过由睫状肌和/或睫状体作用于压电元件上的力来提供。于是,在由于睫状肌和/或睫状体的运动而引起的睫状体信号元件的位置变化和/或电场的其他变化的情况下,能够引起在传感器元件位置处的电场变化。
29.替选地或附加地,睫状体信号元件具有一个或多个表面波结构并且设计用于:根据作用于睫状体信号元件上的机械作用来变化表面波结构的特定特性。一个或多个表面波结构例如能够用于:接收入射的电磁波,即例如无线电信号,并以变化的方式再次发射或反射。变化入射电磁波的方式在此通过以下方式通过表面波结构的特定特性确定:即优选地表面波结构至少部分地引导和反射入射的电磁波。在此,相应的表面波结构的特定特性的变化能够通过对睫状体信号元件的机械作用来影响,使得通过睫状肌和/或睫状体作用于睫状体信号元件上的力、即例如压缩力和/或拉伸力和/或剪切力引起表面波结构的变化,所述力的作用又变化表面波结构的特定特性。以该方式能够通过睫状体信号元件提供睫状体信号,所述睫状体信号对应于入射的电磁波的反射,所述睫状体信号与通过睫状肌和/或睫状体对睫状体信号元件的力相关。
30.替选地或附加地,睫状体信号元件具有光学元件或构造为光学元件。特别优选地,睫状体信号元件设计用于:借助于在眼睛中的传感器元件的位置处的光学信号提供睫状体信号,其中,优选地光学元件具有镜子和/或衍射结构和/或全息结构。这提供以下优点:睫状体信号能够作为光学信号无源地提供。为此,例如能够将光学信号从眼睛中的传感器元件和/或另一辐射源发送至睫状体信号元件,所述睫状体信号元件然后将光学信号反射和/或散射和/或衍射至传感器元件。替选地或附加地,睫状体信号元件能够优选地设计成,使得睫状体信号借助于射入眼睛中的光的反射和/或散射和/或衍射来提供。例如,为此能够将小部分的入射光用于提供睫状体信号,而不会由此显着损害眼睛的透射,即眼睛的光学部件对于至视网膜的光透射。例如,为此能够将非常窄的受限的光谱范围内的光转向至传感器元件。替选地或附加地,睫状体信号元件能够构造用于:将对于眼睛不可见光谱范围中、即例如红外光谱范围中的光作为睫状体信号提供。这提供以下优点:可由视网膜检测到的光没有限制和/或衰弱。在此,睫状体信号的提供优选进行为,使得能够根据在传感器元件处提供的睫状体信号的特性识别睫状体信号对睫状体信号元件的影响,例如根据睫状体信号的入射角和/或信号强度或强度和/或波长的变化来识别。
31.传感器元件优选地具有磁线圈并且尤其优选地设计用于:以感应方式接收睫状体信号。特别优选地,在此,使用具有永磁体或构造为永磁体的睫状体信号元件。这提供以下优点:由永磁体产生的磁场可用于提供睫状体信号。这又提供以下优点:能够以简单方式无源地提供睫状体信号。此外,这提供了以下优点:眼睛中的周围组织不引起磁场的显着减弱,进而能够在传感器元件的位置处可靠地提供睫状体信号。
32.替选地或附加地,传感器元件优选地具有电极并且特别优选地构造用于:以电容方式接收睫状体信号。例如,睫状体信号元件同样能够具有电极或构造为电极。例如,睫状体信号元件的和传感元件的电极能够一起形成电容器。在此,由于睫状肌和/或睫状体的运动而引起的睫状体信号元件的位置变化能够优选地引导电容器的电容变化,根据所述变化可靠地检测睫状肌的因果运动并且能够可靠地识别出眼睛的对应的适应性调节意图。
33.替选地或附加地,传感器元件具有电磁振荡回路或构造为电磁振荡回路。在此,根据一些实施方式,睫状体信号的一个或多个分量也能够有助于振荡电路的功能。例如,睫状体信号元件的电极能够用作振荡回路的电容器的电容器极板。在此,传感器元件特别优选地设计用于:以感应方式和/或以电容方式接收睫状体信号。特别优选地,在此,使用具有永磁体和/或电极或构造为永磁体或电极的睫状体信号元件。由此,例如能够通过睫状体信号
元件的位置变化来变化振荡回路的电感和/或电容特性,并且能够非常灵敏和精确地检测变化。例如,构造为电极的睫状体信号元件与传感器元件中的另一电极一起能够形成传感器元件的振荡回路的电容器。睫状体信号元件的电极的位置变化随后能够引起振荡回路的电容特性的变化,并且实现可靠和灵敏地检测睫状体信号元件的所引起的位置变化。因此,这提供了以下优点:即能够以特别灵敏的方式检测睫状体信号的变化以及相应地以特别灵敏的方式检测睫状肌的姿态的变化,并且能够相应地特别可靠地识别眼睛的适应性调节意图。
34.替选地或附加地,传感器元件优选地能够具有用于无线电信号的收发单元或构成为收发单元。换言之,根据优选的实施方式,传感器元件构成用于:发送和接收无线电信号。这种传感器元件特别优选地与一个或多个睫状体信号元件组合,所述睫状体信号元件分别具有一个或多个表面波结构,以变化的方式反射由传感器元件发射的无线电信号。如果传感器元件随后将无线电信号发送给睫状体信号元件,则无线电信号在表面声波结构中传播,由此根据表面声波结构的特定特性被修改,并再次反射至传感器元件。基于根据特定特性修改的反射的无线电信号,根据所述优选的实施方式,传感器元件能够求出:是否存在通过睫状肌和/或睫状体对睫状体信号元件的力作用,并且识别眼睛的对应的适应性调节意愿的可能的存在。
35.睫状体植入物优选地具有多个无源的睫状体信号元件,所述睫状体信号元件彼此弹性地连接并且环形地或元区段形地和/或相对于人工晶状体的光学轴线相对置地布置在睫状体植入物中。尤其优选地,睫状体植入物环形或圆区段形地构成,并且能够借助于睫状体信号元件之间的弹性连接来变化睫状体植入物的直径和/或曲率半径,并且能够优选地匹配于睫状体和/或睫状肌。这提供了以下优点:即睫状体植入物在其尺寸方面能够匹配于睫状体的内环周,并且能够相应配合精确地布置在睫状体中和/或睫状体处和/或眼沟处。
36.睫状体植入物能够优选地植入眼睛中,使得在睫状体植入物和眼睛的虹膜之间不存在直接的机械接触。这提供以下优点:能够避免并发症,特别是由于iol和虹膜之间的接触和/或iol相对于敏感组织的相对运动而引起的并发症。特别地,能够由此避免色素从虹膜释放的风险并且避免眼液流出的由此引起的受阻。
37.人工晶状体优选具有光学透明的晶状体主体和至少一个突起部,至少一个传感器元件布置在所述突起部处和/或所述突起部中。突起部优选地具有触觉部或构成为触觉部。至少一个突起部能够例如从晶状体主体径向向外延伸。例如,晶状体突起部分能够以平放的方式构成在于晶状体主体相同的平面中。在此,突起部具有以下优点:传感器元件能够布置在iol中和/或iol处,而传感器元件不覆盖iol的孔径的一部分。传感器元件优选地安置在触觉部中。触觉部优选地设计成,使得晶状体能够良好地在囊袋中对准和紧固。此外,触觉部提供了如下可行性:将一个或多个传感器元件布置在触觉部中和/或触觉部处并且对应地也将传感器元件与触觉部紧固和定位在眼睛中。
38.优选地,人工晶状体的屈光效果的控制通过如下方式进行:iol系统根据睫状体信号使人工晶状体中的两个或多个alvarez片相对彼此运动。替选地或附加地,人工晶状体的屈光效果的控制通过如下方式进行:iol系统根据睫状体信号变化人工晶状体中的膜的形状。所述实施方式尤其会对于液体填充的晶状体是有利的,其中,液体的几何排列进而晶状体形状能够借助于膜变化。替选地或附加地,人工晶状体的屈光效果的控制优选地通过如
下方式进行:iol系统根据睫状体信号变化人工晶状体中的光学双合透镜的两个光学部件的间距。替选地或附加地,人工晶状体的屈光效果的控制优选通过如下方式进行:iol系统根据睫状体信号变化人工晶状体的形状,这尤其对于薄的和/或柔性的晶状体会是有利的。然而,除了这些明确提及的实施方式之外,还能够使用其他机制,所述其他机制借助低的力耗费实现晶状体的屈光效果的可靠变化。替选地或附加地,人工晶状体的屈光效果的控制能够优选地通过如下方式进行:即iol系统根据睫状体信号变化iol的折射率来控制。
39.上述和以下解释的特征和实施方式在此不应仅被视作为以各自明确提及的组合来公开,而且也包括公开内容的其他技术上有意义的组合和实施方式。
附图说明
40.现在,根据以下的实例和优选的实施方式参考附图更详细地解释本发明的其他的细节和优点。
41.附图示出:
42.图1以示意图示出根据一个优选的实施方式的具有植入的人工晶状体系统的眼睛的纵截面图和横截面图;
43.图2a和图2b示出根据一个优选的实施方式的处于不同的适应性调节状态中的睫状体植入物;
44.图3示出以相对于人工晶状体的两个不同的旋转取向或角位置的根据之前附图中解释的优选的实施方式的人工晶状体系统;
45.图4示出根据另一优选的实施方式的人工晶状体系统;
46.图5示出根据一个优选的实施方式的睫状体植入物;
47.在以下附图中,为简单起见,在不同的实施方式中相同或相似的元件设有相同的附图标记。
具体实施方式
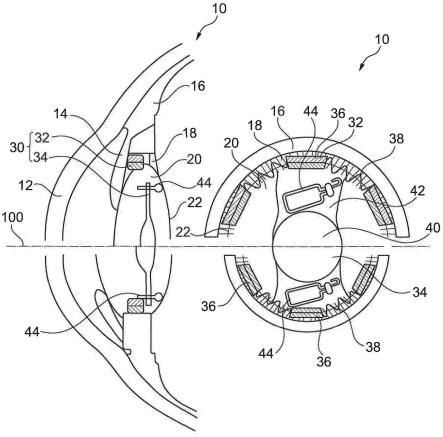
48.图1以示意图示出根据一个优选的实施方式的具有植入的人工晶状体系统30(iol系统)的眼睛10的沿剖平面的纵截面图(左侧)和垂直于光学轴线100的横截面图(右侧),其中,眼睛10的光学轴线100在所述剖平面中伸展。
49.从眼睛10的纵截面图中识别出眼睛10的角膜12和虹膜14,以及位于下方的睫状肌或睫状体16、带状纤维18和空的囊袋22,以及眼睛的被移除的自然晶状体20的位置。
50.图1也沿竖直方向一分为二,其中,纵截面图和横截面图的上部分别示出处于第一适应性调节状态中的眼睛10,并且下部示出处于第二适应性调节状态中的眼睛10。例如,在此,第一适应性调节状态例如能够是眼睛的适应性失调的状态,例如用于远视适应性调节。例如,第二适应性调节状态能够是眼睛10的开始适应性调节的状态,例如用于近视适应性调节。
51.此外,图1示出植入的人工晶状体系统30,所述人工晶状体系统多件式地构成并且具有睫状体植入物32和人工晶状体(iol)34,其中,睫状体植入物32和iol 34彼此分离地构造。.
52.根据所示的优选的实施方式,睫状体植入物32具有六个睫状体信号元件36,所述
睫状体信号元件彼此弹性连接并且被布置成,使得睫状体植入物32构成为环形结构。根据所示的实施方式,睫状体信号元件36借助于机械的弹簧元件38连接。在此,睫状体信号元件36的弹性连接设计成,使得实现睫状体植入物32在径向方向上的压缩和拉伸,以至于当眼睛10适应性调节或过渡到非适应性调节的状态中时,睫状体植入物32能够跟随睫状肌16的运动。
53.根据所示的实施方式,睫状体信号元件36构成为永磁体并且在此布置成,使得所有睫状体信号元件36在径向方向上同种极化。例如,所有睫状体信号元件36能够布置成,使得其磁南极径向指向内并且其北极径向指向外。根据其他的实施方式,睫状体信号元件36也能够布置成,使得其磁北极径向指向内,南极径向指向外。
54.在此,睫状体植入物32以与睫状体直接机械接触的方式在囊袋22外植入眼睛10的眼沟中或眼睛10的眼沟处,使得睫状肌16的运动经由睫状体传递到睫状体植入物32上,并且睫状体植入物对应地经由拉伸或压缩跟随睫状肌16的运动。在跟随睫状肌16运动时,睫状体植入物32能够通过睫状肌16或睫状体被压缩或拉伸,使得睫状体植入物32的直径增大或减小,以至于睫状体植入物32总是紧贴睫状体的内侧或紧贴在眼沟处。
55.iol 34布置在囊袋22内并且具有晶状体主体40以及两个突起部42,所述突起部包含触觉部。传感器元件44分别布置在两个突起部42中。根据其他优选的实施方式,iol 34也能够仅具有一个或多于两个突起部42,一个或多个传感器元件44分别布置在所述突起部中。多个突起部42优选地形成触觉部。
56.在此,传感器元件44分别具有磁线圈,电流或其他的电信号能够通过各自相邻的睫状体信号元件32提供的磁场感应到所述磁线圈中,随后所述电流或其他的电信号能够借助于传感器元件44被检测为睫状体信号。如果相邻的睫状体信号元件32相对于传感器元件44的位置发生变化,特别是由于睫状肌和/或睫状体的运动而发生变化,则这引起在传感器元件44中的通过睫状体信号元件32的磁场感应的电流的变化并且对应地引起睫状体信号的变化。
57.睫状体植入物32和iol 40优选地布置成,使得每个传感器元件44在径向方向上与睫状体信号元件36相邻地布置,以便实现在传感器元件44和相邻的睫状体信号元件36之间的尽可能大的相互作用。在此有利的是:如在所示实施方式中那样,睫状体植入物32具有多个睫状体信号元件36,特别是多于两个的睫状体信号元件36,因为这在植入时简化了将睫状体植入物32和iol 34相对彼此布置成使得分别一个睫状体信号元件36与相应的传感器元件44相邻布置,进而简化了植入过程。
58.在此,iol系统30实现了根据睫状体信号改变眼睛10的屈光效果。在此,iol系统优选构成为,使得所述iol系统能够根据睫状体信号改变iol 34的屈光效果,即这对应于识别到的适应性调节意愿,所述适应性调节意愿归因于睫状肌16的被检测到的运动。因此,植入的iol系统30提供如下可行性:经由睫状肌16和/或睫状体的运动改变iol 34的屈光效果,并以此方式适应性调节或适应性失调眼睛。
59.在图1的上部中,眼睛10分别在第一适应性调节状态中示出,所述第一适应性调节状态为用于远视适应性调节的弱适应性调节。在此,睫状肌16松弛,并且对应地睫状肌16仅将小的力经由睫状体施加到iol 34上,使得iol 34径向松弛并且具有比在强适应性调节状态中更小的屈光力。在此,睫状体植入物32同样被拉伸或松弛并适配于睫状体的内径,使得
睫状体植入物32也具有大的直径(相对于在眼睛的适应性调节状态中的直径)。
60.在图1的下部中,眼睛10分别在第二适应性调节状态中示出,所述第二适应性调节状态为例如用于近视适应性调节的强适应性调节。在此,睫状肌16被张紧,由此间接地将径向向内作用的力施加到睫状体植入物32上并且经由睫状体植入物32施加到iol 34上。在此,根据睫状体信号,iol系统30间接地将力至少施加到iol 34上,由此iol 34的屈光力增加,使得眼睛10更强地适应性调节。
61.根据图2a和图2b示出了睫状体植入物32的运动和睫状体信号元件36相对于传感器元件44的位置或方位的由此产生的变化。为了清楚起见,仅示出传感器元件44,但是没有示出iol 34的其他元件。图2a示出根据图1所示的优选的实施方式的睫状体植入物32的示意图。在图2a的右侧上,示出处于径向按压或压缩的形式的睫状体植入物32,例如处于适应性调节的状态中。左侧示出处于松弛或伸展形式的睫状体植入物32,例如在眼睛10的弱适应性调节的状态中。同样地,图2a示出径向处于睫状体植入物32之内的传感器元件44,所述传感器元件接收由各自相邻的睫状体信号元件提供的睫状体信号。由于睫状体植入物32的压缩或松弛,在传感器元件44的位置处提供的睫状体信号发生变化,使得传感器元件44或iol系统40根据睫状体信号的相应的变化能够求出睫状肌的运动并且对应地求出眼睛10的适应性调节意愿。图2b说明了睫状体植入物32的运动和睫状体信号元件32相对于传感器元件44的相对方位的由此引起的变化和根据iol系统在压缩状态(内)和松弛状态(外)中的叠加的示图说明的睫状体信号由此得出的变化。
62.图3示出了以相对于iol 34的两个不同的旋转取向和角位置的根据在之前的附图中解释的优选的实施方式的iol系统30。为了实现在传感器元件44与各自相邻的睫状体信号元件36之间尽可能大的相互作用并且对应地最大化睫状体信号的幅度,将睫状体信号元件36之一相对于相应的传感器元件44精确径向地相邻定位是有利的。此外,使用沿圆周方向布置的大量睫状体信号元件34还提供了以下优点,即减弱或完全消除了对睫状体信号元件34相对于相应的传感器元件44的精确地相对定位的需要,因为与直接邻接于睫状体信号元件36的位置相比,在各个睫状体信号元件34之间的睫状体信号元件34整体产生的信号场没有减弱或仅以非常小的程度减弱。
63.图4示出根据另一优选的实施方式的iol系统30。根据所述实施方式,睫状体植入物具有构造成光学元件的睫状体信号元件32。在iol 34中在虹膜后构成的传感器元件44被构造成光学传感器。此外,iol 34具有多个体积全息元件48,所述体积全息元件被布置和构成为,使得体积全息元件将射入眼睛10中的光的(小)部分朝向睫状体信号元件36反射。根据所示的实施方式,光通过体积全息元件48的反射是经由被构成在iol 34中或iol处的另一反射器元件50所实现的。
64.睫状体植入物36例如能够被构造成镜子或具有这种镜子。例如,传感器元件44能够具有光电检测器,即例如ccd和/或cmos检测器和/或光电二极管,其中,光电检测器被设计用于:在由体积全息元件48和反射器元件50反射光时,检测所述光并且优选地将所述光转换成电信号。体积全息元件48能够例如被构造成iol 34的折射率的变体并且能够被集成到iol的晶状体主体40中。在此,体积全息元件48优选地被设计用于:以高效率反射非常窄的波长范围中的光,并透射其他波长范围中的光。体积全息元件48优选地构成用于:反射光谱范围内的光或反射具有如下波长的光:所述波长对于眼镜、即对于视网膜不可见,例如红
外光谱范围内的光。只要晶状体20和iol 34对紫外光的波长是透明的,就能够优选地使用在紫外光谱范围内的光的反射。尽管仅示出一个睫状体信号元件36、一个传感器元件44、一个反射器元件50和两个体积全息元件48,但根据其他优选的实施方式的相应的元件也能够以其他数量存在。
65.只要睫状体信号元件36构成为镜子或包括镜子,则有利的是:将所述镜子布置在睫状体的上侧处,使得在人直立时所述镜子向下定向。由此,与将镜子以向上的定向的方式布置在睫状体的下侧相比,能够减少或避免在镜子上形成沉积物和随之产生的功能损害。
66.根据所述实施方式的iol系统30的工作方式基于以下:即睫状体信号元件36相对于传感器元件的间距变化和/或睫状体信号元件36的由于睫状肌运动产生的另一位置变化引起到达传感器元件的光通量发生变化,并且所述变化能够被用作为睫状体信号。例如,睫状体信号或睫状体信号的变化能够在于:当睫状体信号元件36运动时,反射光射到传感器元件或光电检测器上的位置发生变化。例如,为此,传感器元件44能够具有位置敏感的光电检测器或二维检测器阵列。替选地或附加地,通过睫状体信号元件36的位置变化能够改变射到传感器元件44上的光的强度或光量,并且能够基于此提供睫状体信号。
67.在图4中还示出射入眼睛中的光的两个示例性的射束路径104。所述射束路径识别出:例如通过瞳孔准直射入眼睛10中的光通过体积全息元件48反射到反射器元件50上并且从那里继续反射到睫状体信号元件36上。睫状体信号元件36又将光反射到传感器元件44,所述传感器元件然后检测所述光并从中求出睫状体信号。通过传感器元件44布置在虹膜14后方的方式,能够避免光直接入射到传感器元件44上,即避免未由体积全息元件48和反射器元件50反射的光直接入射到传感器元件上,并且对应地能够避免睫状体信号的由此引起的失真。
68.图5示出了根据一个优选的实施方式的睫状体植入物32。睫状体植入物32总共具有七个睫状体信号元件36,所述睫状体信号元件分别被构造为镜元件。在图5的左侧上,睫状体植入物32以拉伸状态示出,例如在睫状肌松弛的情况下示出,并且在右侧上以压缩或按压的状态示出,例如在睫状肌张紧的状态下示出。睫状体植入物32的压缩和松弛能够在机械弹簧元件38的按压或松弛的情况下进行,经由所述弹簧元件将睫状体信号元件36彼此连接。
69.在此,睫状体植入物32构成为,使得所述睫状体植入物能够布置在睫状体的内表面处和/或眼沟处,使得反射表面向内、即朝向眼睛的光学轴线定向。
70.在此,睫状体植入物32构成为,使得在拉伸状态下,如示出的示例性的射束路径104所示的入射光部分地落到睫状体信号元件36上,并由所述睫状体信号元件反射,而入射光的另一部分落到睫状体信号元件36之间的区域上,并且对应地不被反射。通过在睫状体植入物被拉伸的状态下(在图5中的左侧)在睫状体信号元件36之间的区域比在压缩状态(在图5中的右侧)时的区域更大,与压缩的状态相比,在拉伸状态时更少部分的入射光将被反射到传感器元件44上。以该方式,反射光的强度的变化能够作为睫状体信号提供。不言而喻,根据其他的实施方式,睫状体植入物32也能够具有其他数量的睫状体信号元件36和/或睫状体植入物能够以其他的形状设计,例如环形地设计。
71.能够尤其有利的是:将如参考图5描述的这样构成的睫状体植入物组合到如参考图4描述的iol系统30中。
72.附图标记列表
73.10
ꢀꢀꢀꢀꢀ
眼睛
74.12
ꢀꢀꢀꢀꢀ
角膜
75.14
ꢀꢀꢀꢀꢀ
虹膜
76.16
ꢀꢀꢀꢀꢀ
睫状肌
77.18
ꢀꢀꢀꢀꢀ
带状纤维
78.20
ꢀꢀꢀꢀꢀ
眼睛的被移除的自然晶状体的位置
79.22
ꢀꢀꢀꢀꢀ
囊袋
80.30
ꢀꢀꢀꢀꢀ
人工晶状体系统(iol系统)
81.32
ꢀꢀꢀꢀꢀ
睫状体植入物
82.34
ꢀꢀꢀꢀꢀ
人工晶状体(iol)
83.36
ꢀꢀꢀꢀꢀ
睫状体信号元件
84.38
ꢀꢀꢀꢀꢀ
机械弹簧元件
85.40
ꢀꢀꢀꢀꢀ
晶状体主体
86.42
ꢀꢀꢀꢀꢀ
突起部
87.44
ꢀꢀꢀꢀꢀ
传感器元件
88.48
ꢀꢀꢀꢀꢀ
体积全息元件
89.50
ꢀꢀꢀꢀꢀ
反射元件
90.100
ꢀꢀꢀꢀ
眼睛的光学轴线
91.102
ꢀꢀꢀꢀ
用于对准iol系统的转动方向
92.104
ꢀꢀꢀꢀ
示例性的射束路径。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。