1.本发明涉及一种设备的开环和闭环控制方法,该设备包括运动模块,根据该模块与人的交互。
背景技术:
2.随着机器人系统在人类生活的越来越多的领域中得到应用,在机器人系统与人的交互方面,与机器人系统的开环和闭环控制相关的预期质量标准也相应提高。在这种情况下,安全方面起着决定性的作用,特别是在医疗工程中:目的是康复机器人接受治疗任务,例如在运动治疗和/或早期康复的范围内,并因此首先将医学-理疗人员从常规任务中解脱出来,其次便于对患者进行早期运动治疗,这是针对他们单个地适应的并在时间上是独立的。然而,机器人系统和人类(患者)之间的交互对技术控制系统提出了特别高的要求,因为人类,尤其是身体受损、可能卧床不起和/或甚至昏迷不醒的患者,经常以不受控制或不可预测的方式作用于机器人系统。因此,决定性的控制目标在于使闭环和开环控制算法容忍不可预测的外部影响(患者/人),同时给人提供一种交互的余地。
3.此外,通过评估人类和康复机器人之间的交互,可以精确地做出关于患者健康状态或康复进程的陈述。
4.机器人辅助运动疗法的治疗成功在很大程度上取决于患者的“主动”参与,本文中的“主动”应理解为机器人辅助运动期间的有意识的肌肉运动(主动运动或跳动的抽搐)和(例如,在无意识患者的情况下)无意识肌肉收缩/放松(例如,痉挛)。
5.来自医疗工程的早期机器人系统通常使用纯位置控制的控制系统,其中,必须严格遵守机器人指定的运动轨迹,并患者不可能在他们的运动能力(仍然)存在的情况下影响期望的运动模式。这种纯粹被动的、机器人辅助运动疗法概念导致相对较少的治疗成功。
6.为了增加患者对运动疗法的参与,随后开发了所谓的“按需辅助”控制系统;这些允许患者在一定程度上影响由机器人系统引导的运动轨迹,机器人监控运动并可选地执行校正或在时间和空间上提供辅助。有可能显示这种“按需辅助”系统能够增加治疗的成功率;然而,这种方法对各自的控制系统提出了特别高的要求,尤其是在例如事件(事故、脑血管事故、手术等)后几小时或几天内的患者的非常早期的移动(vem)的范围内,因为这种患者通常可能仍然是无意识的或镇静的,可能遭受感知障碍、眩晕和/或癫痫,或者可能在控制运动器械时遭受干扰,这大大增加了不受控制或不完全受控制的运动的可能性。力控制/依赖控制系统通过机器人系统的停用对(突然发生的)外部干扰(=力作用或偏离期望轨迹)的作用作出反应,并在其他应用领域中得到应用,在医疗工程应用的情况下通常不利地导致治疗延迟和治疗质量的降低,患者非指定力阈值(触发),以便最小化伤害的风险,这不利地可能导致许多错误的停用(过早停用),或者,如果设定了单个的阈值,则必须以耗时的方式初始确定这些阈值,然后在运动治疗的过程中根据患者变化的身体状态来调整这些阈值。
7.长期确立的适当开环和闭环控制方法的实例可见于:
8.groothuis,s.s.,haarman,c.j.w,f.,stramigioli,s.:在康复系统上实施的初始控制范例(initial control paradigms implemented on rehabilitation system),2018年5月23日出版,网址为:https://ec.europa.eu/research/participants/documents/downloadpublic?doc-umentids=080166e5b916f0de&appid=ppgms
[0009] schindelbeck,c.,haddadin,s.:通过任务能量罐对刚性和柔性关节机器人进行统一的基于无源性的笛卡尔力/阻抗控制(initial control paradigms implemented on rehabilitation system),2015年i eee机器人和自动化国际会议(icra),华盛顿州西雅图,2015年,第440-447页(doi:10.1109/icra.2015.7139036)
[0010] shariari,e.;johannesmeier,l.,haddadin,s.:基于阀门的虚拟能源罐:同时钝化控制和嵌入控制目标的框架(valve-based virtual energy tanks:a framework to simultaneously passify controls and embed control objectives),2018年年度美国控制会议(acc),威斯康星州密尔沃基,2018年,第3634-3641页(doi:10.23919/acc.2018.8431718)
技术实现要素:
[0011]
由此出发,本发明的目的是提供一种方法,用于开环和闭环控制包括运动模块的设备,特别是康复机器人,该方法对现有技术进行了改进,不仅改进了设备与人的交互,还提供了基于交互得出关于人参与期望运动的结论的选项,然后根据该参与控制设备。
[0012]
该目的通过具有独立权利要求1特征的方法实现。从属权利要求的主题是能够单个使用或彼此结合使用的进一步有利的设置和发展。
[0013]
根据本发明的用于对至少包括运动模块的设备的开环和闭环控制的方法,就其与人的交互而言,区别在于:,
[0014]-定义了能量网络,后者至少包括:
[0015]-第一功率分量p
in
,描述该设备在每单位时间提供给设备和人的系统的总能量s的能量之量;
[0016]-第二功率分量p
diss
,描述设备在主要辅助运动模块执行的工作之外,通过内部开环和闭环控制过程由设备损失的每单位时间能量之量;以及
[0017]-第三功率分量ph,描述由人提供给的每单位时间相对于总能量s的能量之量;
[0018]-能量网络的总能量s,即是设备和人的系统的总能量s,被定义为受控变量;
[0019]-设备通过运动模块与人交互的速度被定义为控制变量ω,该运动模块旨在穿过期望轨迹xd;
[0020]-能量网络的总能量,
[0021]-由人独立执行的运动偏离由设备初始指定的沿着轨迹xd的运动增多;以及
[0022]-如果由人独立执行的运动接近沿着设备初始指定的轨迹xd的运动,则再次减小;
[0023]-在运动模块运动期间确定能量网络的总能量s,以及
[0024]-控制变量ω在运动模块的运动期间根据所确定的总能量s而变化,使得总能量s
[0025]-保持在s≤s
max
–sδ
的区间内(如果位于所述区间内),或者
[0026]-如果位于区间s》s
max
–sδ
内,则再次接近区间s≤s
max
–sδ
,其中
[0027]-s
max
=总能量s的选定上限;
[0028]-s
δ
=s
max
–sx1
,其中,s
x1
代表受控变量(=总能量)s的单个值,以及x=n用于标定p
in
》0区间的值,以及x=p用于标定p
in
《0区间的值。
[0029]
根据本发明的方法定义了能量网络,结果是可以考虑整个功率周期,特别是设备/人系统中的能量或功率流的动态,并有利地考虑控制期间人的表现。这种基于控制/限制总能量s的基于能量的控制方法,描述了设备的能量贡献和人的能量贡献,根据参与状态,有利地为使用设备的人在执行运动时提供了空间和时间自由度,并因此促进了训练或康复进程。
[0030]
定性地,根据本发明的方法可使用康复机构(=根据医学领域的计划适当设计以执行康复运动的设备(机器人)的示例)概述如下:
[0031]
健康人可以跟随康复机构指定的运动,由康复机构的运动模块的期望轨迹表示,也就是说,人可以精确地跟随运动模块的运动速度,使得人和设备之间的相互作用力可以小到忽略不计。
[0032]
健康受损的人通常不再能够以相同的准确度水平跟随运动模块的期望运动。出现误差,特别是期望轨迹和运动模块,特别是设备的末端效应器经过的实际轨迹之间的偏差。
[0033]
通常,在本技术的范围内,区分三种不同类型的轨迹:
[0034]“标称轨迹”被理解为由治疗师指定的运动序列(从治疗的角度来看是理想的)。如果运动实际上是沿着这个标称轨迹执行的,则控制变量ω的值为1。
[0035]“设备指定的轨迹(运动模块)=期望轨迹”被理解为运动模块的运动轨迹或运动序列,尤其是其末端效应器的运动轨迹或运动序列,运动模块试图根据指定的控制算法遵循该运动轨迹或序列。例如,如果控制变量为ω≠1,则需要遵循这样的轨迹。
[0036]“实际轨迹”被理解为运动模块的实际物理实现的运动轨迹,尤其是其末端效应器的运动轨迹。实际轨迹可能偏斜期望轨迹,例如因为设备的阻抗控制被设定为软的,并允许人(患者)通过在其上施加力来偏离设备的末端效应器。当实施导纳控制而不是阻抗控制时,类似的陈述也适用(见下文)。
[0037]
在健康受损的人运动期间可能出现的前述误差通过实际轨迹与期望轨迹的偏差表示。
[0038]
在根据本发明的开环和闭环控制方法的范围内,该误差反映在受控变量中,特别是反映在能量网络的总能量s中,即反映在设备和人的系统。在这种情况下,总能量s是上面定义的三个功率分量p
in
、ph和p
diss
的函数。
[0039]
当借助于根据本发明的设备执行自动化治疗运动时,该受控变量-总能量s-现在旨在保持在某个“优选”区间,特别地,在区间s≤s
max-s
δ
内。
[0040]
在这种情况下,变量s可被影响或通过设备被影响,该设备通过其功率分量p
in
,该变量s并通过人的表现ph受到人的影响。从数学上讲,这可在等式20(见下文)中表达,等式20描述了总能量s随时间的变化。
[0041]
此外,现在开环和闭环控制方法的范围内区分两种情况:
[0042]
首先是总能量s已经处于优选区间s≤s
max
–sδ
的情况。在这种情况下,人设法沿着期望轨迹前进,也许不是完美的,但仍然达到最大可能的程度;举例来说,人几乎可以保持期望的运动速度。在这种情况下,该设备没有进一步干预运动,控制变量保持在ω=1。
[0043]
在适用的区间s≤s
max
–sδ
中,取决于总能量s的控制变量ω的灵敏度等于零(或近似为零);控制变量ω不变;与期望轨迹的偏差是容许的。这个区间可以通过适当选择变量s
max
和s
δ
来控制。
[0044]
在第二种情况下,s在优选区间之外,那就是说s》s
max
–sδ
。在这种情况下,实际轨迹和期望轨迹之间存在显著偏差;例如,这可能是由于与运动模块指定的运动相比,人运动得(非常)太慢或(非常)太快。
[0045]
在这种情况下,根据本发明的方法范围内的目标在于减小总能量s,也就是说将变量s带回优选区间s≤s
max
–sδ
。
[0046]
同样,实现这一点有两种选择:
[0047]
人类自行管理变量s的减小,特别是通过他们自己采取对策,并相应地加快或减慢他们的运动,以这种方式再次接近期望轨迹。在这种情况下,功率分量ph将是负的,根据等式20,如果ph的绝对值足够大,这将导致总能量s的减小。
[0048]
通常,功率分量ph描述了由人“产生”的物理作用力。如果人完美地遵循期望轨迹,也就是说如果实际轨迹等于期望轨迹,则它为零。如果人类自己试图接近期望轨迹,则ph为负,因为在该过程中位置和速度的误差减小,因此总能量s减小。
[0049]
或者作为第二种选择,人自己不管理该减小,或者至少不完全管理该减小。在这种情况下,该设备通过改变功率分量p
in
来辅助人减小总能量s。功率分量p
in
描述了期望轨迹内各自期望末端效应器位置处的功率。
[0050]
根据等式13和23,功率分量p
in
可通过控制变量ω来影响。现在在根据本发明的闭环和开环控制方法的范围内,设定控制变量ω的变化,这通过p
in
的变化减小了总能量s,并允许该总能量再次接近优选区间s≤s
max
–sδ
。
[0051]
在该方法的一个优选设置中,该设备是一种康复机构,该康复机构适于使用能够与人的下肢可操作地连接的运动模块,根据计划对人的下肢的至少关节、肌肉和肌腱进行康复;该运动模块包括至少一个力传感器,该力传感器用于测量运动模块和人的下肢之间的力的绝对值,以及至少一个角度传感器,该角度传感器用于测量运动模块和人的下肢之间的力的方向。该方法特别适合于这种康复机构的开环和闭环控制,因为它有利地促进了对人的当前健康或适应状态的连续调整,并因此优化了康复成功。
[0052]
此外,已经证明控制变量ω定义为,
[0053][0054]
其中:
[0055]-γ
p
=控制变量ω的最大允许正值;
[0056]-γn=控制变量ω的最大允许负值(绝对值);
[0057]-s=设备和人的系统的总能量;
[0058]-s
max
=总能量s的选定上限;
[0059]-sδ=s
max
–sp_x
,其中,s
p_x
代表受控变量s的单个值。
[0060]
通过如此定义的控制变量ω,该控制变量ω描述了设备的运动速度,尤其是运动模块的运动速度,有利地可以跟踪人的运动参与,并根据计划“形成”总存储函数(s),即系统的总能量。
[0061]
或者,控制变量(ω)也可定义为
[0062][0063]
其中:
[0064]-γ
p
=控制变量(ω)的最大允许正值;
[0065]-γn=控制变量(ω)的最大允许负值(绝对值);
[0066]-s=设备和人的系统的总能量;
[0067]-s
max
=总能量(s)的选定上限;
[0068]-s
δ
=s
max
–sp_x
,其中,s
p_x
代表受控变量s的单个值;
[0069]-sδ=s
δ
中间的区域,该控制变量(ω)设定为零,其中p
in
》0。
[0070]
控制变量(ω)的这种定义有利地允许在第一功率分量(p
in
),即由运动发生器产生的输入系统的功率,大于零(p
in
》0)的时间区间内和第一功率分量(p
in
《0)小于零(p
in
《0)的时间区间内对设备进行交互独立的开环和闭环控制。
[0071]
在根据本发明的方法的另一可选设置中,控制变量(ω)可以定义为
[0072][0073]
其中:
[0074]-γ
p
=控制变量(ω)的最大允许正值;
[0075]-γn=控制变量(ω)的最大允许负值(绝对值);
[0076]-s=设备(1)和人(m)的系统的总能量;
[0077]-s
max
=总能量(s)的选定上限;
[0078]-s
δ
=s
max
ζ
–sp_x
,其中,s
p_x
代表受控变量s的单个值;
[0079][0080]
其中,
[0081][0082]
τ=允许设备(1)处于静止状态的最长时间。
[0083]
控制变量ω的这种定义有利地考虑了患者不能(立即)跟随设备指定的运动周期的时间段。在这种情况下,参数ζ的引入为设备提供了间歇停止或等待状态的选项。
[0084]
在该方法的优选设置中,基于所确定的总能量s,尤其是通过实施过滤器、速率限制和/或控制变量ω相对于总能量s的一阶导数的绝对值极限,可在运动模块运动期间抑制控制变量ω的变化。因此,可有利地最小化被认为令人烦恼的振动,该振动可在系统中由于对总能量s的反馈而改变控制变量ω时出现。如果控制变量ω对总能量s(也可称为总存储函数s)的依赖性具有高灵敏度,则这种振动尤其可能出现。
[0085]
在进一步的设置中,设备和人的系统的总能量(s)优选地定义为总存储函数s=s
ce
或总存储函数s=s
ce
s
ee
,
[0086]
其中:
[0087]-s
ce
=控制误差能量存储函数;
[0088]-s
ee
=设备末端效应器的总能量,尤其是运动模块的总能量,包括动能和势能。
[0089]
在这种情况下,如果控制误差能量存储函数被定义为,
[0090]
其中:
[0091]-mc(q)是笛卡尔惯性矩矩阵;以及
[0092]-k
x
是笛卡尔刚度矩阵。
[0093]
此外,发现总能量(s)包括虚拟绝对能量值和实际绝对能量值是有利的。
[0094]
这种控制误差能量存储函数s
ce
有利地考虑了本系统中所有与设备相关的能量贡献。
[0095]
在这种情况下,有利的是,能量存储函数s
ce
通过第一功率分量p
in
确定,,第一功率分量p
in
通过计算与第二功率分量p
diss
组合;或者通过设备和人之间的相互作用力来计算,特别是通过力传感器来测量运动模块和人的下肢之间的力的绝对值。
[0096]
为了确定能量存储函数s
ce
,原则上可以考虑设备引入的能量,并通过计算将其与设备的机械结构“消耗”的能量相结合。然而,这需要各自设备的良好模型。
[0097]
确定能量存储函数s
ce
的更简单方法通过确定设备与人之间的相互作用力,尤其是设备末端效应器处的相互作用力来实现。首先,可以使用设备的动力学模型和轴向扭矩来计算这种相互作用力。或者,该相互作用力也可以通过测量来确定。为此,可以有利地使用力传感器来测量运动模块和人的下肢之间的力的绝对值。
[0098]
使用测量的相互作用力,首先可以直接计算能量存储函数s
ce
;其次,力传感器测量的值也可用于确定由于施加相互作用力(在导纳控制的意义上,参见上文)而导致的设备的末端效应器所采用的位置与其理想位置的偏差。
[0099]
用于此目的的设备模型将末端效应器的行为描述为具有给定刚度和阻尼的虚拟弹簧-阻尼器系统,由于向力传感器施加外力,末端效应器根据虚拟弹簧常数偏斜其期望轨迹。然后,能量存储函数s
ce
可以根据与期望轨迹的偏差来计算。
[0100]
因此,总存储函数的时间导数有利地出现为p
in
ph–
p
diss
,
[0101]
其中:
[0102]-p
in
∈r=由运动发生器产生的输入系统的功率;
[0103]-p
diss
∈r=控制阻尼造成的功率损失;
[0104]-ph=由人提供给设备和人的系统的功率,
[0105]
因此,可以有利地考虑控制方法范围内的人的表现。
[0106]
在该方法的优选设置中,此外,已经证明在执行运动时,通过设备的迭代学习过程,确定选定用于执行运动的极限(s
max
)是有价值的,该极限用于对应于总能量(s)和/或变量s
δ
=s
max
–sp_x
的总存储函数,其中,s
p_x
是总能量(s)的单个值。优选地,在该迭代学习过程期间,不仅从一步到另一步调整极限s
max
,而且调整函数ω(s)的区间边界,特别是根据变量s
δ
=s
max
–sp_x
,其中,s
p_x
是总能量(s)的单个值。
[0107]
此外,优选地,在迭代学习过程的范围内,用于确定人在设备指定的运动中的参与状态的学习因子k
l
和/或遗忘因子kf可随时间变化,优选地随时间线性变化,直到学习因子k
l
和/或遗忘因子kf达到预先定义的最终值。结果,学习因子k
l
和/或遗忘因子kf可以有利地动态适应运动治疗期间人的健康状态,特别是治疗期间患者的当前疲劳状态。
[0108]
有利的是,在这种情况下,可在第一次迭代步骤中选定极限值(s
max
),在该值的情况下,设备完全辅助人类执行运动,且控制变量(ω)的值为1;只要控制变量(ω)保持值为1,极限值(s
max
)就在每个进一步的迭代步骤中减小;并如果控制变量(ω)偏离值1,则极限值(s
max
)在下一个迭代步骤中再次增加。这种用于确定最佳极限(s
max
)的迭代学习过程有利地允许在不使用额外传感器的情况下确定人的参与能力,例如在肌电图(emg)的范围内需要额外传感器。有利的是,人的当前健康或适应状态以及康复成功也可以从由此确定的参与能力中推导出来。
[0109]
为了确定初始极限(s
init
(φ)),在根据本发明的方法的进一步设置中,该设备可在没有给定极限(s
max
)的情况下初始运行n个运动周期,运动周期的数量n在2≤n≤5个运动周期的区间内,优选为3个运动周期。可以在该过程中记录s(φ)曲线,并随后可以计算记录的s(φ值的平均值作为初始极限(s
init
(φ)),其可以作为迭代学习过程的第一迭代步骤中的极限(s
max
)的初始值,其形式为λ
·sinit
(φ),λ≥1。在该初始化的范围内,用于确定人在由设备指定的运动中的参与状态的学习因子(k
l
)和/或遗忘因子(kf)也可以基于初始极限(s
init
(φ))进行缩放。初始化可以有利地增加根据本发明的方法的患者特异性。
[0110]
在这种情况下,基于描述设备运动周期内运动进程的相位值(φ),可将选定用于执行运动的极限(s
max
)划分为多个区域(ψi(φ)),极限用于对应于总能量(s)的总存储函数,并可为每个区域(ψi(φ))确定初始极限(s
init,i
(φ))。
[0111]
通过以这种方式确定初始极限(s
init
(φ)),特别是对于以相位相关方式确定的单个区域(ψi(φ)),对于具有不同临床图像的不同患者,有利地是可能的,在运动治疗开始之前,单个地自动确定与总能量(s)相对应的总存储函数的极限(s
max
)的初始值。
[0112]
最后,根据本发明的方法的设置也证明了其价值,其中选定用于执行运动的极限
(s
max
),该极限用于对应于总能量(s)的总存储函数,基于描述设备运动周期内的运动进程的相位值(φ),被分成区域(φi(φ)),描述从φ
str,i
到φ
str,i 1
的相位值区间的区域(φi(φ)),并为每个区域(φi(φ))独立地定义要选定的极限(s
max
(φ)),以下适用于区域(φi(φ))的所有相位值(φ)
[0113][0114]
其中,δ≥0描述了平滑区间,该区间包括比区域(φi(φ))更小的相位值(φ)的值范围,尤其是各自区域(φi(φ))的相位值(φ)的十分之一;并是与各自区域相关联的极限。
[0115]
通过这种方式,治疗师可以有利地定义用于激活不同肌肉群的不同区域,并根据这些区域,确定该设备的辅助效果以及该设备在这些区域内的适应范围。这里,辅助效果的程度可以通过平滑函数来描述,有利地防止了运动序列中的中断或干扰。
[0116]
本发明还涉及一种设备,该设备包括康复机构,该康复机构适合于使用能够与人的下肢操作性连接的运动模块,根据计划对人的下肢的至少关节、肌肉和肌腱进行康复;该运动模块包括至少一个力传感器,用于测量运动模块和人的下肢之间的力的绝对值,以及至少一个角度传感器,用于测量运动模块和人的下肢之间的力的方向,该设备的特征在于它包括控制单元,该控制单元被设置为用于根据权利要求1至14所述的方法对设备进行开环和闭环控制。
附图说明
[0117]
以下基于优选示例性实施例描述了本发明的附加细节和进一步的优点,然而这些实施例并不限制本发明,并结合附图,
[0118]
其中,示意性地:
[0119]
图1示出了设备和人的系统的能量流图,其形成了根据本发明的方法的基础;
[0120]
图2a示出了控制变量(ω)对作为受控变量的总能量(s)的函数依赖性的第一示例;
[0121]
图2b示出了控制变量(ω)对作为受控变量的总能量(s)的函数依赖性的第二示例;
[0122]
图3示出了在根据本发明的方法的范围内的示例性学习过程的框图;
[0123]
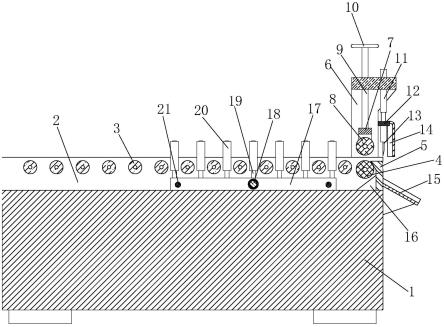
图4a示出了可以使用根据本发明的方法控制的设备的第一实施例;
[0124]
图4b示出了可以使用根据本发明的方法控制的设备的第二实施例;以及
[0125]
图5示出了根据本发明的设备的开环和闭环控制的(φ-s
p1
(=s
max
))曲线的示例,该控制取决于相位值(φ)。
具体实施方式
[0126]
在本发明优选实施例的以下描述中,相同的附图标记表示相同或相当的部件。
[0127]
根据本发明的用于设备1的开环和闭环控制的方法,至少包括运动模块50,就其与人m的交互而言,原则上不是设备指定的,并可以在多种设备1,尤其是机器人系统的开环和闭环控制中找到用途。然而,该方法的使用尤其优选用于机器人系统的开环和闭环控制,该机器人系统用于在患者的康复中提供基于医疗工程的辅助,特别是在脑血管意外或身体和/或认知能力受损的严重事故之后。在这方面,示例性地参考由申请人之一在de 10 2015 117 596 b3中公开的康复机构。
[0128]
为了解释根据本发明的方法,由可被驱动成垂直的床和用于与人m的腿交互的两个机械臂组成的机器人康复系统在下文中被认为是模型系统或设备1(在这方面也参见图4a和图4b)。
[0129]
图4a和4b示出了可由根据本发明的方法控制的设备1的第一和第二实施例。
[0130]
这种设备1优选地包括康复机构30,该康复机构30适合于使用运动模块50根据计划至少对人m的下肢的关节、肌肉和肌腱进行康复,该运动模块50能够与人m的下肢进行可操作地连接;运动模块50包括至少一个力传感器51和至少一个角度传感器52,力传感器51用于测量运动模块50和人m的下肢之间的力的绝对值,角度传感器52用于测量运动模块50和人m的下肢之间的力的方向。借助于控制单元11,根据本发明的方法对设备1进行开环或闭环控制。
[0131]
每个机械臂优选地包括n个电机驱动关节和一个被动末端关节,以避免过度确定,从而考虑人m的一条或多条大腿的各自方位。对于控制模型的以下推导和根据本发明的方法的解释,机械臂被认为是相同的,因此解释可限制于一个机械臂,尽管这些同样适用于另一个机械臂。
[0132]
i)用于描述设备1,尤其是机器人康复系统的模型
[0133]
在考虑机器人系统的运动结构的范围内,假设机器人的末端效应器和关节仅平行于xy平面运动(参见图4a中关于坐标系的定义),因此,其在三维空间(“r3空间”)中的运动可通过xy平面内的位置和z轴方向来描述。此外,由于机械臂的最后一个关节是被动的,为了开发机器人系统的开环和闭环控制方法,考虑被动关节xr∈r3的笛卡尔保持/定位,而不是末端效应器定位xh∈r3(参见图4a)。fr;fh∈r3表示xr和xh处的力的作用(“交互扳手”),在这种情况下,与xy平面上的线性力和绕z轴的扭矩相关。
[0134]
考虑到机器人的n个电机驱动关节和床的方位qb,机器人的坐标(包括最后一个关节)为q∈r
rn 1
,直接运动学(正向运动学)为,
[0135]
(1)
ꢀꢀꢀ
xr=f(q).
[0136]
其中,床的方向qb包含在q中。
[0137]
此外,假设床的定向由单独的致动器驱动,从而在此处描述的动态模型中不考虑相应引入的扭矩。
[0138]
动态模型描述如下:
[0139]
(2)
ꢀꢀꢀ
[0140]
(3)
ꢀꢀꢀ
q:=[qb,q
′
]
t
[0141]
用m(q')(=机器人的惯性矩矩阵),(=机器人的科里奥利和离心矩阵)rn×n和g(q)∈rn(=机器人的重力矢量)。τ
in
∈rn是引入机器人致动器的扭矩,其中τr表示力(“扳手”)fr的作用,通过以下方式映射在机器人的电机驱动关节上,
[0142]
(4)
ꢀꢀꢀ
τr=j
t
(q)fr,
[0143]
(5)
ꢀꢀꢀ
[0144]
用j(q)∈rn×3=机器人的雅可比矩阵。
[0145]
ii)基于能量考虑的控制方法
[0146]
根据本发明的控制方案基于调整将由机器人执行的运动(“机器人期望运动”)以便在设备1和人m的系统内形成能量流,从而控制人m和设备1之间的能量传递。考虑到为特定康复运动指定的具有指定运动幅度的周期轨迹,调整机器人穿过轨迹的速度,使得也遵守指定的能量极限。以这种方式获得的调整后的轨迹(“重新成形的轨迹”)然后作为输入被传送到用于控制交互运动的控制单元,以便获得用于机器人致动器的引入扭矩(“输入扭矩”)(参见图1)。
[0147]
图1示出了设备1和人m的系统的能量流图,其形成了根据本发明的方法的基础。
[0148]
在下文中,控制方法的运动定律现在初始以示例性方式建立,并随后导出模型的能量网络。
[0149]
a)控制交互运动
[0150]
假设设备1,尤其是机器人,在整个治疗过程中与人m保持物理接触(=进行治疗运动)。因此,建议使用适应性控制方法,例如笛卡尔阻抗控制。
[0151]
如果相应地被视为设备1的轨迹,尤其是机器人的轨迹,以笛卡尔坐标描述,则出现以下关系:
[0152]
(6)
ꢀꢀꢀ
[0153]
(7)
ꢀꢀꢀ
[0154]
用k
x
(=笛卡尔刚度矩阵);d
x
(=笛卡尔阻尼矩阵)∈r3×33和mc(q)(=笛卡尔惯性矩矩阵),(=笛卡尔科里奥利和离心矩阵)r3×3[0155]
这些矩阵定义为:
[0156]
(8)
ꢀꢀꢀ
[0157]
(9)
ꢀꢀꢀ
[0158]
b)系统中能量流的描述
[0159]
考虑到等式(2)和(6),闭环控制电路的动态出现以下情况:
[0160]
(10)
ꢀꢀꢀ
[0161]
可为这种设备1(尤其是这种机器人)定义以下控制误差能量存储函数:
[0162]
(11)
ꢀꢀꢀ
[0163]
考虑到等式(10)和的反对称特性有可能证明以下内容:
[0164]
(12)
ꢀꢀꢀ
[0165]
其中,p
in
∈r描述了由运动发生器(尤其对应于设备1的运动模块50)产生的输入系统的功率,pr∈r描述了由周围环境产生的输入系统的功率,并p
diss
∈r描述了由控制阻尼造成的功率损失。这些变量定义如下:
[0166]
(13)
[0167]
(14)
[0168]
(15)
[0169]
此外,考虑到图4a,设备1的末端效应器,尤其是机器人的末端效应器的能量流可以类似的方式描述。末端效应器的总能量包括动能和势能,因此
[0170]
(16)
[0171]
其中,x
ee
∈r3描述了各自末端效应器姿态的质心坐标,g0=[0,g0,0]
t
描述了世界坐标中的重力矢量,m
ee
∈r和m
ee
∈r3×3描述了末端效应器的质量或惯性矩矩阵。惯性矩矩阵定义为:
[0172]
(17)
ꢀꢀꢀmee
=diag(m
ee
,m
ee
,i
zz,ee
),
[0173]
其中i
zz,ee
∈r
是末端效应器惯性矩张量的最后一个分量。
[0174]
考虑到牛顿第二定律和作用在末端效应器上的力的总和,出现以下情况:
[0175]
(18)
ꢀꢀꢀ
[0176]
现在可以将总存储函数s∈r
》0
定义为:
[0177]
(19)
ꢀꢀꢀ
s:=s
ce
s
ee
,
[0178]
以及,通过考虑等式(12)和(18),出现以下情况:
[0179]
(20)
ꢀꢀꢀ
[0180]
其中,ph描述了由人m提供给设备1和人m的系统的功率,反过来定义为:
[0181]
(21)
ꢀꢀꢀ
[0182]
图1显示了等式式(20)的示意性解释,其描述了根据本发明的开环和闭环控制方法的主要特征。由于与患者运动相关的功率输入和输出ph、p
in
和p
diss
、轨迹发生器和控制阻尼的组合效应,存储在由根据本发明的开环和闭环控制方法控制的机器人中的能量随时间变化。基于与最大允许能量s
max
和阈值s
max-s
δ
相比较的存储能量s的当前水平,调整周期运动ω的频率,其对应于设备1的速度,尤其是其运动模块50的速度,并因此也调整期望(指定)轨迹xd。这种调整直接影响运动发生器向/从设备1和人m的系统的能量输入或输出,也就是说随着时间的推移进入系统的功率输入p
in
。
[0183]
c)能量极限
[0184]
通常,基于能量的控制建模用于通过无源性分析来检查系统的稳定性。然而,这种模型具有进一步的优点,特别是例如描述两个独立(部分)系统之间的能量流。如果其中一
个(部分)系统不可预测地运行,例如在人m的情况下(就他们与设备1的交互而言),这是特别令人感兴趣的。
[0185]
在shahriari,e.,kramberger,agams,ude,哈达丁:适应接触:基于被动的动态运动基元的能量罐和任务能量(adapting to contacts:energy tanks and task energy for passivity-based dynamic movement primitives;):2017年ieee-ras第17届人形机器人(humanoids)国际会议,伯明翰,2017年,第136
–
142页(doi:10.1109/humanoids.2017.8239548)。
[0186]
根据本发明的开环和闭环控制方法现在提供应用上述导出的能量模型,从而限制从设备1传递到人m的能量,并提供设备1的响应水平根据计划与人m的运动相匹配。
[0187]
从等式(20)出发,受控设备1,尤其是机器人,相对于通道和是被动的。为了系统的整体稳定性,因此有必要钝化上述通道对系统的作用/影响。这样做的一个选择在于增加已经为这些通道定义的虚拟能量罐,因为根据计划的虚拟能量罐的设计相当于总存储函数s的极限。如果总存储函数s(对应于由虚拟和实际(“真实”)能量组成的系统的总能量)保证总是有界的,则整个系统的稳定性得到保证。
[0188]
此外,从等式(20)得出的是,设备1和人m之间的能量流直接取决于总存储函数s。s的高值可被解释为存储能量的大绝对值,其可在ph《0时转移到人m。根据等式(21),如果由设备1指定(产生)的运动与由人m施加的力相反,则可能是这种情况。通过限制存储的能量s,可以将从设备1到人m的可能能量转移的大小限制在安全范围内。从以上陈述,可以推导出总存储函数s(=总能量)存在绝对上限,其满足稳定性和安全性要求。因此,可以在0值和上述绝对上限之间定义任何极限s
max
。s
max
的精确选择影响设备1对人m的运动和设备1的期望的指定运动之间的偏差的响应水平,特别是机器人或设备1的运动模块50。
[0189]
在假设s
ee
《《sr的情况下,等式(11)和(19)得出总存储函数s主要由跟踪误差变量和和的大小决定。通过根据人m的运动改变指定的轨迹,这些变量的值只能在控制侧依次减小。对于该应用,这意味着选择s
max
的较小值的结果导致设备1在与人交互的范围内变得更加灵敏。
[0190]
d)基于能量的运动发生器
[0191]
不能直接控制总存储函数s,因为它是人m的不可预测运动的函数,也就是说如等式(20)和(21)所示。然而,如等式(13)所示,或者以不同的“形状”表示,间接地通过p
in
来控制s,通过使用(s-s
max
)作为参考来调整xd。在这种情况下,必须考虑这样的事实,即控制或整形能量不应该改变由治疗师指定的轨迹模式或期望轨迹幅度,而仅仅是期望的运动的速度。理论上,轨迹模式可以以任何方式指定;然而,特别是为了演示的目的,使用平滑正弦函数,
[0192]
(
ꢀꢀꢀ
xd=0.5a(1-cos(2πφ)),22)
[0193][0194]
已经证明了它的价值,其中,a∈r
≥0
表示幅度,ω∈r
≥0
表示所需周期运动的频率。周期相位φ∈[0,1]描述了一个周期内运动的前进,并对于任何时间t由下式确定
[0195]
(24)
[0196]
其中,t0描述周期运动的开始时间。
[0197]
从等式(22)和(23)中可以明显看出,在考虑指定轨迹幅度的同时,可以通过调整ω来控制或成型整个系统的期望速度和最终能量。此外,相位值φ也可以用于确定人m的腿何时已经运行了完整的运动周期,以便由此触发另一条腿的运动。这有利地防止了腿相对于彼此的独立且混乱的运动曲线。
[0198]
用于平滑调整ω的运动调整法则最终可以如下:
[0199]
(25)
[0200][0201]
其中,s
max-s
δ
表示能量控制或整形开始时的s极限,γ
p
和γn各自表示ω的最大允许正值和负值。
[0202]
可选地,根据本发明用于平滑调整ω的优选运动调整法则也可以如下:
[0203]
(25a)
[0204][0205]
在这种情况下,控制变量ω被设定为等于零的区域,s
δ
被定义s
δ
的区间的中间,该区间s
δ
在p
in
》0的区间(对应于图2a和2b中的各自的左侧)。
[0206]
图2a和2b各自示出了控制变量ω对作为受控变量的总能量s的函数依赖性的第一和第二示例。
[0207]
ω的标准值为1。如果s超过允许极限,ω的控制或变化取决于p
in
的值,也就是说取决于功率流的方向。如果p
in
》0,也就是说设备1在超过极限时向系统提供能量,则ω减小,以便减慢或甚至逆转期望的指定运动。如果p
in
《0,也就是说由于人m向系统提供能量而超过了能量极限,则ω增加,以便减小跟踪误差,即和作为其结果,能量从系统中取出,并系统被带到更安全(稳定)的水平。图2a根据等式(25)显示ω与s的函数关系。
[0208]
在图2b中示出了控制变量ω对作为受控变量的总能量s的函数依赖性的第二个例子,尤其是可以由等式(25a)描述的例子。在这种情况下,对于图2a(右)和图2b(左)的参数,
出现以下关系:
[0209]sp2
=s
max
[0210]sp1
=s
max-s
δ
[0211]sn1
=s
max-s
δ
[0212][0213][0214]sn4
=s
max
[0215]
此外,如果sδ设定为零((sδ=0)),则出现以下情况:
[0216]
(25b)
[0217][0218]
其中
[0219]sp2
=s
max
[0220]sp1
=s
max-s
δ
[0221]sn1
=s
max-s
δ
[0222][0223]sn4
=s
max
[0224]
应用。
[0225]
为了设定设备1的不同响应阈值(“响应水平”),尤其可以为参数或参数之间的关系选择以下值:
[0226][0227][0228]
此处,值s
p2
对应于图2a中的值s
max
。值s
p1
对应于差值s
max-s
δ
,从上表可以明显看出,该值可用于设定p
in
》0一侧的所有参数s
nx
。控制变量ω的这种控制方案的优点在于,与图2a的方案相比,左手侧(p
in
》0)的ω(s)的过零点不是交点,而是“相交区间”(=区间ω=0)。ω(s)的过零点,也就是说从ω(s)《0到ω(s)》0的符号变化,对应于由设备1指定的运动方向的变化。在图2b所示的情况下,这种方向的改变并不像图2a那样突然,而是更加平滑,因此对于人m来说更加舒适。
[0229]
此外,可存在用于获得某些设备属性的进一步参数规范。例如,在第一种情况下,值γn可以被设定为等于零,使得患者不可能(无意中)逆转指定的运动方向。其次,将参数s
n2
和s
n3
设定为相等可能导致设备1的运动不稳定。
[0230]
前述控制变量ω的调整,以及由此通过根据本发明的方法操作的设备1的辅助动作的开环和闭环控制,完全基于能量考虑。然而,为了扩展本方法,也可以考虑因子时间。
[0231]
在根据本发明的方法的该变型中,控制变量ω定义如下:
[0232]
(25摄氏度)
[0233][0234]
在这种情况下,总能量s的选定上限s
max
总是乘以系数ζ,其中,
[0235][0236]
本例中的因子描述了运动周期内设备1处于静止状态的持续时间。这意味着,如果设备1在运动中(即,如果相位值φ的时间导数为≠0),该因子等于0。一旦设备1停止,例如由于患者(人m)的阻力(相位值的时间导数φ≈0),该因子随时间增长。在这种情况下,参数τ描述了设备1可以保持静止的最大允许持续时间。实际上,这意味着如果患者(人m)不能跟随设备1的指定运动,例如因为他们的健康状况当前太差,并设备1因此停止所执行的运动,则设备1能够保持静止达τ秒的持续时间。由于当考虑等式(25c)和(25d)时,极限s
max
呈指数增长,所以总能量s的当前值落入在该持续时间τ之后控制变量ω=1终止的区间。因此,设备1然后继续以正常速度运动。
[0237]
iii)控制的迭代学习过程
[0238]
如上所述,s
max
的高值对应于设备1对人m的运动的低响应水平,反之亦然。因此,在s
max
的高值的情况下,不会调整所需的指定运动。取而代之的是,人m由设备1,尤其是由机器人或设备1的运动模块50,根据由治疗师指定的一条或多条运动轨迹来牵引,其中考虑了人主动参与的程度或者甚至对指定运动的可能阻力(在每种情况下由变量ph表示)。这种控制在人m不能独立运动他们的腿并需要设备1显著或完全辅助的情况下是有用的。然而,如果s
max
的值减小,则设备1相对于人类m的响应水平增加(=设备1反应更快),这意味着如果类m不参与指定运动或对指定运动施加阻力,则期望的指定运动被调整。在这种情况下,设备1的运动被减慢、停止或逆转,直到人m主动开始跟随指定运动。实现这一点的优选方式包括减小一条或多条腿与设备1之间的相互作用力。
[0239]
在康复范围内,s
max
值的选择取决于人m的健康状况,其目的是考虑主动参与可能对愈合过程产生有利影响,并可能防止出现进一步并发症的风险。为此,s
max
值小的控制对于具有相对高的固有强度的人m是有利的,这些人能够独立地作用在设备1上,尤其是机器人或设备1的运动模块50上。然而,如果人类m不能主动地参与运动,s
max
的值必须保持在较大的值,以便执行治疗运动。因此,s
max
的最佳值来自各自人m的最低值,在该最低值下,期望的指定运动仅被最小程度地改变。如果s
max
根据该规则连续调整,则变量s
max
因此可以用作人参与指定运动的能力的测量。
[0240]
此外,应记住,人m参与运动的力量或能力可能在执行运动时发生变化,例如由于疲劳或循环变化,因此这可能导致设备1持续改变辅助水平,也就是说,持续改变必要的响应水平。为了在(治疗)运动期间对人m,尤其是向患者提供最佳辅助,s
max
应该相应地调整到人m在运动的整个表现期间参与的当前能力。在这种情况下,人m的参与状态可以通过附加的传感器监测,特别是在肌电图(emg)的范围内。然而,如下所示,也可以通过设备1的学习算法来确定参与状态,有利地不使用另外的传感器。
[0241]
图3示出了根据本发明的方法范围内的示例性学习过程的框图。
[0242]
在疗程开始时选定的s
max
高值。该值被设定得如此之高,以至于设备1完全辅助人m执行运动,从而根据等式(25)调整到期望的指定运动的法则不会被“触发”,并ω保持值1。在会话范围内,只要ω保持值1,s
max
的值就随着每次贯穿周期运动而迭代减小(也就是说,使用遗忘算法(“遗忘过程”)。由于减小s
max
的值增加了设备1对人m参与运动的灵敏度(即,响应水平),这使得可以连续地确定s
max
的值,该值足够小,使得人m不再能够足够准确地跟随指定的运动,从而通过偏离值1来“触发”控制变量ω。如果是这种情况,s
max
在下一个运动迭代中增加(也就是说,发生了一个学习过程)。通过在每次迭代(=每次运动迭代)期间测量控制变量ω的值,因此可以确定人m的参与状态并各自地调整s
max
的值。在数学上,第i次迭代之后的学习过程可以描述如下:
[0243]
(26)
[0244]
其中表示第i次迭代期间所有ω值的平均值,k
l
和kf分别表示学习因子和遗忘因子。在这种情况下,优选地选定k
l
》》kf,使得学习因子k
l
的权重更大。
[0245]
基于框图,在图3中以示例性方式示出了这种迭代学习过程。原始轨迹xd*在轨迹生成器中根据存储在系统中的能量和已获知的最大允许能量进行调整。
[0246]
所描述的开环和闭环控制方法的扩展现在还可包括允许治疗师基于待激活或训练的肌肉或肌肉群,将设备1的操作模式分类为不同区域(区域φi),并以目标方式为这些区域φi中的每一个设定辅助程度(“辅助水平”)或设备1的操作模式。设备1的辅助程度,即“辅助水平”,在这里被定义为平滑函数,其在可能的情况下避免设备1的运动中断。根据本发明,这种开环和闭环控制可以优选地基于根据相位值φ划分成区域φi,如等式(24)中所定义的。
[0247]
图5示出了根据本发明的设备1的开环和闭环控制的((φ-s
p1
(=s
max
))曲线的示例,该控制取决于相位值((φ)。
[0248]
在这种情况下,区域φi描述了从φ
str,i
到φ
str,i 1
的相位值区间。为了准备运动疗法,治疗师可以根据各自患者的需要来设定区域,具体来说,可以分成四个区域φi,φ
str,1
=0,φ
str,2
=0.25,φ
str,3
=0.5,φ
str,4
=0.75,φ
str,5
=1。现在,可以为这些区域φi中的每一个定义一个独立的极限s
max,i
(φ),以下公式适用于区域φi的所有相位值φi:
[0249]
(27)
[0250][0251]
此处,该值与各自的区域φi相关联,并可在运动治疗期间通过迭代学习过程进行改善(针对治疗进程进行调整和优化),尤其是如上所述。在这种情况下,所谓的平滑区间δ≥0优选地具有比各自区域φi(φ).更小的相位值φ的值范围特别地,平滑区间δ可以包括各自区域φi(φ)的相位值φ的十分之一在分成例如四个区域(φi(φ))的情况下,对于人m的每条腿,相位值φ的取值范围从0到1(关于这一点,参见等式24),这可以产生在每种情况下单个区域φi(φ的长度为0.25“相位单元”,平滑区间δ的长度为0.025“相位单元”。
[0252]
最后,作为用于确定初始极限s
init
(φ的迭代学习过程的进一步改进,设备1可在没有给定极限s
max
的情况下初始运行n个运动周期,运动周期的数量n在2≤n≤5个运动周期的区间内,优选为3个运动周期。在这种情况下,优选记录s(φ)曲线,并随后计算记录的s(φ)值的平均值作为初始极限s
init
(φ).该初始极限(s
init
(φ))然后被用作迭代学习过程的第一迭代步骤中的极限(s
max
)的初始值,特别是如上所述,以λ
·sinit
(φ)为λ≥1的形式。这种将初始极限s
init
(φ)自动确定为“s
max
的第一值”有利地允许单个地、可靠且快速地为不同患者确定合适的初始值,所述不同患者在其健康方面具有非常不同的起点。
[0253]
本发明涉及一种用于设备1的开环和闭环控制的方法,所述设备1至少包括运动模块50,就其与人m的交互而言,所述方法基于基于能量的控制方案,所述控制方案使得能够根据描述设备1或其运动模块50的运动速度的测量控制变量ω来监控包括设备1和人m的系统中的总能量的量。该方法有利地考虑了包括设备1和人m的系统中的整个功率周期,特别是能量或功率流的动态,并考虑了人m在闭环控制期间的表现。该方法还有利地使得使用设备1的人m的参与状态能够在迭代学习过程中被确定,而无需额外的传感器。
[0254]
附图标记
[0255]
1 设备
[0256]
11 控制单元
[0257]
30 康复机构
[0258]
50 运动模块
[0259]
51 力传感器
[0260]
52 角度传感器
[0261] 描述运动轨迹的笛卡尔坐标的时间导数(速度)
[0262]
s 总能量(总存储函数)
[0263]smax 选定的总能量极限
[0264]
p
in 将运动发生器产生的输入系统的功率
[0265]
p
h 由人(m)提供给设备(1)和人(m)系统的功率
[0266]
p
diss 控制阻尼造成的功率损失
[0267]
m 人
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。