1.本技术属于机器人领域,更具体地说,是涉及一种水下机器人。
背景技术:
2.水下机器人技术飞速发展,目前多种深海探测机器人已经得到开发,包括载人潜水器、自主水下机器人(auv)、遥控水下机器人(rov)等,此类机器人大多由螺旋桨推进,搭载各种探测仪器,能够用于执行许多科学勘探及商业和军事任务,完成水下观测、取样等。但此类机器人多设计为零浮力,容易受到海流扰动影响,且推进螺旋桨容易造成海泥表层扰动和海流扰动,控制较为困难,运动精确度难以保证,影响探测结果。此外,此类机器人不能在海底稳定停驻行走运动,在开展海底探测时具有很大的局限性。
3.对此,现有技术中出现了足式水下探测机器人,但是,目前的足式水下探测机器人虽然可以完成各种传统探测器的任务,但是在进行位置转移时,机器人水下移动速度较慢,在面对深海海底复杂地形,松软海泥地质以及礁石、沟壑时,通过能力差,机动性差,运动灵活不佳。另外,机器人驱动电机大多布置安放在关节处,加大了足端的重量,而惯量的增大,将会导致不便于精确控制。而海底蕴藏着丰富的资源,未来海洋探测必将向海底探测发展,甚至建立深海空间站,开展海底资源勘探开发,而现有技术的深海探测机器人将难以适应未来复杂的海底任务的需要。
技术实现要素:
4.本技术实施例的目的在于提供一种水下机器人,主要解决现有足式水下机器人的足端由于惯量较大而导致机器人在水中控制困难的技术问题。
5.为实现上述目的,本技术采用的技术方案是:提供一种水下机器人,包括机身及多个连接于所述机身的腿部模块;所述腿部模块包括连接臂、大腿、小腿、第一驱动机构和第二驱动机构,所述连接臂连接于所述机身,所述连接臂、所述大腿及所述小腿依次转动连接;
6.所述第一驱动机构包括相连的第一驱动器和第一传动组件,所述第一驱动器连接于所述连接臂,所述第一驱动机构的重心位于所述第一驱动器上,所述第一传动组件连接所述大腿,所述第一驱动器用于通过所述第一传动组件驱动所述大腿相对于所述连接臂转动;
7.所述第二驱动机构包括相连的第二驱动器和第二传动组件,所述第二驱动器连接于所述连接臂,所述第二驱动机构的重心位于所述第二驱动器上,所述第二传动组件连接所述小腿,所述第二驱动器用于通过所述第二传动组件驱动所述小腿相对于所述大腿转动。
8.在其中一个实施例中,所述第一传动组件包括主动带轮、从动带轮和传动带;
9.所述从动带轮连接所述大腿并与所述连接臂转动连接,所述传动带绕设于所述主动带轮和所述从动带轮上,所述第一驱动器连接所述主动带轮并用于驱动所述主动带轮转
动,并通过所述传动带带动所述从动带轮转动,以带动所述大腿相对于所述连接臂转动。
10.在其中一个实施例中,所述第二传动组件包括主动绳轮、从动绳轮、第一绳子和第二绳子;
11.所述从动绳轮连接所述小腿并与所述大腿转动连接,所述第一绳子连接所述主动绳轮和所述从动绳轮,并正向缠绕于所述从动绳轮,所述第二绳子连接所述主动绳轮和所述从动绳轮,并反向缠绕于所述从动绳轮,所述第二驱动器连接所述主动绳轮,所述第二驱动器用于驱动所述主动绳轮正向转动,以拉动所述第一绳子并带动所述从动绳轮正向转动,所述第二驱动器还用于驱动所述主动绳轮反向转动,以拉动所述第二绳子并带动所述从动绳轮反向转动。
12.在其中一个实施例中,所述第二传动组件还包括同步绳轮,所述同步绳轮连接于所述连接臂或所述大腿,所述第一绳子和所述第二绳子分别缠绕或搭设于所述同步绳轮上。
13.在其中一个实施例中,所述腿部模块还包括摆动机构,所述摆动机构连接所述机身和所述连接臂,所述摆动机构用于驱动所述连接臂相对于所述机身摆动。
14.在其中一个实施例中,所述摆动机构包括基座、第三驱动器和传动机构;
15.所述基座连接所述机身,所述第三驱动器连接所述基座,所述传动机构连接所述第三驱动器和所述连接臂,所述第三驱动器通过所述传动机构驱动所述连接臂摆动。
16.在其中一个实施例中,所述小腿朝向所述机身的一侧连接有蹼片。
17.在其中一个实施例中,所述水下机器人还包括游泳动力模块,所述游泳动力模块连接于所述机身的底部,并且,多个所述腿部模块共同围设于所述游泳动力模块的外周,所述游泳动力模块用于驱动所述机身和多个所述腿部模块前进。
18.在其中一个实施例中,所述游泳动力模块包括连接架、第四驱动器、传动杆及布置于所述传动杆两侧的多个动力组件;
19.所述连接架连接于所述机身,所述动力组件转动连接于所述传动杆,并连接于所述连接架,所述第四驱动器连接于所述连接架并用于驱动所述传动杆作往复运动,以使所述传动杆带动多个所述动力组件往复拨动。
20.在其中一个实施例中,所述游泳动力模块还包括曲柄和连杆;所述曲柄连接于所述第四驱动器,所述第四驱动器用于驱动所述曲柄作往复旋转运动;所述连杆的两端分别转动连接于所述曲柄及所述传动杆;
21.所述动力组件包括相连接的安装杆和蹼水片,所述安装杆上设有条形孔,所述连接架上设有限位轴,所述限位轴穿设于所述条形孔内并可沿所述条形孔的孔壁自由移动,所述安装杆远离所述蹼水片的一端转动连接于所述传动杆。
22.与现有技术相比,本技术提供的水下机器人的有益效果至少在于:
23.一方面,本技术通过多个腿部模块连接于机身,可稳定机器人的重心,提高机器人的抗干扰能力;
24.另一方面,本技术采用第一驱动器驱动大腿相对于连接臂转动,并且,采用第二驱动器驱动小腿相对于大腿转动,从而满足足式水下机器人对腿部模块所需动作的设计要求,更为重要的是,本技术的第一驱动机构和第二驱动机构的重心都没有落在大腿和小腿上,也没有落在大腿和连接臂之间的转动关节上,也没有落在小腿和大腿之间的转动关节
上,而是落在连接臂上,从而大幅减小了大腿和小腿的重量,进而减小了大腿和小腿的转动惯量,因此可便于控制大腿和小腿活动的精确度,不仅如此,本技术的第一驱动机构的重心和第二驱动机构的重心还向机身靠近,相当于,本技术各个腿部模块的重心都向机身靠近,从而使得本技术的机器人整体的重心都向中部的机身集中,从而使得当大腿和小腿在海里活动时,机器人整体在海里更加稳定,从而解决现有足式机器人由于足端活动惯量大而导致不稳定及难以控制的问题。
附图说明
25.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
26.图1为本技术实施例提供的水下机器人的结构示意图;
27.图2为本技术实施例提供的舱体的结构分解图;
28.图3为本技术实施例提供的腿部模块的结构示意图;
29.图4为本技术实施例提供的腿部模块的结构分解图;
30.图5为本技术实施例提供的第二驱动机构的结构原理图;
31.图6为本技术实施例提供的游泳动力模块的结构示意图;
32.图7为本技术实施例提供的游泳动力模块的结构分解图。
33.其中,图中各附图标记:
34.10、机身;101、机架;102、舱体;1021、密封舱;1022、第一舱盖;1023、第二舱盖;10211、收容孔;
35.20、腿部模块;201、连接臂;202、大腿;203、小腿;204、第一驱动机构;205、第二驱动机构;206、第一轴承;207、转动杆;208、第二轴承;209、转动轴;210、蹼片;
36.2041、第一驱动器;2042、主动带轮;2043、从动带轮;2044、传动带;2045、皮带张紧机构;
37.2051、第二驱动器;2052、主动绳轮;2053、从动绳轮;2054、第一绳子;2055、第二绳子;2056、同步绳轮;
38.230、摆动机构;2301、基座;2302、第三驱动器;2303、传动机构;23031、主动轮;23032、从动轮;23033、皮带;23034、传动轴;23035、张紧轮;2304、防尘罩;
39.30、游泳动力模块;301、连接架;302、曲柄;303、连杆;304、第四驱动器;305、传动杆;306、动力组件;
40.3011、支架;3012、连接板;3013、安装板;3014、限位轴;
41.3061、安装杆;30611、条形孔;3062、安装架;3063、蹼水片。
具体实施方式
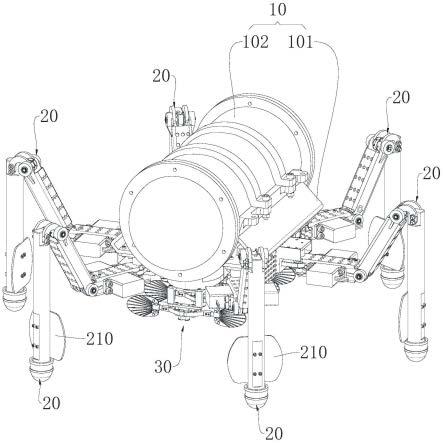
42.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
43.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
44.需要理解的是,术语、“上”、“下”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
45.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
46.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
47.请参阅图1,现对本技术实施例提供的一种水下机器人进行说明。所述水下机器人包括机身10、多个腿部模块20和一个游泳动力模块30。
48.请参阅图1,各个腿部模块20均与机身10相连接,并且共同呈圆周阵列布置在机身10的外围。于本实施例中,腿部模块20的数量优选为六个,于其他实施例,腿部模块20的数量也可以是八个或十个等等,本技术不限于所述腿部模块20的具体数量。通过多个腿部模块20的共同作用,可带动机身10在海底中行走。而游泳动力模块30则设置在机身10的底部,并且,多个腿部模块20共同围设在游泳动力模块30的外周,该游泳动力模块30可供机身10和各个腿部模块20在海里提供前进的动力。由此可知,本实施例的水下机器人具有海陆两用的优点。
49.请参阅图1,本实施例的机身10主要包括机架101和舱体102。其中,舱体102固定在机架101上,并可与机架101可拆卸连接,同时,舱体102的外壁可以安装各类传感器,以及时地反馈水下环境信息,完成探测任务。另外,舱体102内设置有密封腔(图中未示出),该密封腔用于安装电气控制模块,该电气控制模块可接收外界信息,并控制各个腿部模块20和游泳动力模块30的工作。
50.请参阅图2,于本实施例中,舱体102优选地包括密封舱1021、第一舱盖1022和第二舱盖1023。其中,密封舱1021内开设有收容孔10211,收容孔10211贯穿整个密封舱1021,而第一舱盖1022连接在密封舱1021的一端,第二舱盖1023连接在密封舱1021的另一端,从而将收容孔10211密封起来。换而言之,收容孔10211的孔壁、第一舱盖1022内侧的舱壁和第二舱盖1023内壁的舱壁共同围设形成了上述的密封腔。
51.请一并参阅图3-图5,以下对腿部模块20的结构设计进行详细地说明:
52.本实施例的腿部模块20主要包括连接臂201、大腿202、小腿203、第一驱动机构204和第二驱动机构205。而第一驱动机构204又包括相连的第一驱动器2041和第一传动组件,第二驱动机构205又包括相连的第二驱动器2051和第二传动组件。
53.其中,连接臂201与机身10相连接,此处可理解为,连接臂201可以与机身10固定连接,连接臂201也可以与机身10活动连接,甚至于,连接臂201还可以和机身10一体成型。
54.其中,大腿202和连接臂201转动连接,两个部件相互转动的结构设计有很多种,比
如,于本实施例,连接臂201靠近大腿202的一端安装有第一轴承206,第一轴承206的外圈固定在连接臂201上,第一轴承206的内圈穿设有一根转动杆207,而大腿202靠近连接臂201的第一端套设在该转动杆207的外壁上并与转动杆207固定连接,此时,大腿202和连接臂201可绕转动杆207的轴心相互转动。于其他实施例,大腿202和连接臂201的相互转动还可通过穿设一根销钉来实现。
55.其中,小腿203和大腿202转动连接,于本实施例中,大腿202远离连接臂201的第二端安装有第二轴承208,第二轴承208的外圈固定在大腿202上,第二轴承208的内圈穿设有一根转动轴209,而小腿203靠近大腿202的一端套设在转动轴209的外壁上并与转动轴209固定连接,此时,小腿203和大腿202可绕转动轴209的轴心相互转动。于其他实施例,小腿203和大腿202的相互转动还可通过穿设一根销钉来实现。
56.其中,第一驱动器2041固定在连接臂201上,第一驱动器2041优选为舵机,第一驱动机构204的重心落在第一驱动器2041上,即第一驱动机构204的重心远离大腿202的第一端并向机身10靠近,换而言之,请参阅图3,第一驱动机构204的重心远离转动杆207并向机身10靠近,并且,第一驱动机构204连接大腿202和连接臂201,并用于驱动大腿202和连接臂201绕转动杆207的轴心相互转动。
57.其中,第二驱动器2051固定在连接臂201上,并与第一驱动器2041相对设置,从而让腿部模块20整体的重心更加稳重合理,而且第二驱动器2051也是舵机。另外,第二驱动机构205的重心落在第二驱动器2051上,即第二驱动机构205的重心也远离大腿202的第一端并向机身10靠近,换而言之,请参阅图3,第二驱动机构205的重心远离转动杆207并向机身10靠近,并且,第二驱动机构205连接大腿202和小腿203,并用于驱动小腿203和大腿202绕转动轴209的轴心相互转动。
58.本实施例于此处重点说明的是,本实施例采用了第一驱动机构204驱动连接臂201和大腿202相互转动,并且,采用第二驱动机构205驱动大腿202和小腿203相互转动,从而满足足式水下机器人对腿部模块20所需动作的设计要求。更为重要的是,本技术的第一驱动机构204和第二驱动机构205的重心都没有落在大腿202和小腿203上,也没有落在大腿202和连接臂201之间的转动关节上,也没有落在小腿203和大腿202之间的转动关节上,而是落在与第一驱动机构204和第二驱动机构205均固定连接的连接臂201上,从而大幅减小了大腿202和小腿203的重量和各自的转动惯量。不仅如此,本技术的第一驱动机构204的重心和第二驱动机构205的重心还向机身10靠近,相当于,本技术各个腿部模块20的重心都向机身10靠近,从而使得本实施例的机器人整体的重心都向中部的机身10集中,因此,采用本技术的技术方案,可便于控制大腿202和小腿203活动的精确度,当大腿202和小腿203在海里进行活动时,机器人整体在海里更加稳定,从而解决现有足式机器人由于足端活动惯量大而导致不稳定及难以控制的问题。另外,本实施例的大腿202和小腿203都采用3d打印材料,在满足强度的要求下,进一步减小了大腿202和小腿203的质量和转动惯量,进而进一步提高了机器人在海里的抗干扰能力,使机器人在海里更加稳定。
59.具体而言,请一并参阅图3-图5,上述所述的第一传动组件包括主动带轮2042、从动带轮2043和传动带2044。
60.其中,主动带轮2042与第一驱动器2041的输出轴固定连接,主动带轮2042远离大腿202的第一端并向机身10靠近,从动带轮2043套设在转动杆207的外壁上并与转动杆207
固定连接,传动带2044则绕在主动带轮2042和从动带轮2043上。工作时,第一驱动器2041可带动主动带轮2042作旋转运动,通过传动带2044的传动,主动带轮2042又会带动从动带轮2043作旋转运动,从而带动了转动杆207的转动,进而驱动大腿202和连接臂201的相互转动。
61.由上段可知,本技术将第一驱动机构204设计为带式的传动结构,可使第一驱动机构204自身的质量做到较轻,并且还能让第一驱动机构204的重心尽量远离大腿202的第一端且向机身10靠近。
62.另外,本实施例的第一驱动机构204还包括皮带张紧机构2045,该皮带张紧机构2045安装在连接臂201上,并用于张紧传动带2044,而由于皮带张紧机构2045的作用是现有技术,此处不展开阐述。
63.对于现有技术而言,为了实现小腿203和大腿202的相互转动,现有技术通常将驱动机构直接设置在转动杆207上或者布置在大腿202上,而本技术的第二驱动器2051是布置在连接臂201上,而且大腿202和连接臂201是可以相互转动的,正因如此,在对第二传动组件进行具体的结构设计时,需要考虑第二传动组件是否与可转动的大腿202相干涉的问题。
64.进一步而言,为了实现将第二驱动器2051布置在连接臂201上并同时避免第二传动组件和大腿202相干涉的问题,请一并参阅图3-图5,于本实施例中,第二传动组件包括主动绳轮2052、从动绳轮2053、第一绳子2054、第二绳子2055和同步绳轮2056。其中,图5中虚线表示的是第一绳子2054,点划线表示的是第二绳子2055。
65.其中,主动绳轮2052与第二驱动器2051的输出轴固定连接,并且,主动绳轮2052远离大腿202的第一端并向机身10靠近,从动绳轮2053则套设在转动轴209的外壁上并与转动轴209固定连接,同步绳轮2056固定在转动杆207的外壁上并与转动杆207固定连接,而第一绳子2054的一端固定在主动绳轮2052上,第一绳子2054绕过同步绳轮2056后,第一绳子2054的另一端固定在从动绳轮2053上,同理地,第二绳子2055的一端固定在主动绳轮2052上,第二绳子2055绕过同步绳轮2056后,第二绳子2055的另一端固定在从动绳轮2053上。
66.本实施例的第二驱动机构205的工作原理为:第二驱动器2051可驱动主动绳轮2052作正向转动,此时第一绳子2054的一端将会在主动绳轮2052上自动缠绕起来,第一绳子2054的另一端将会拉动从动绳轮2053作正向转动,于此同时,由于从动绳轮2053的正向转动,所以第二绳子2055的一端将会在从动绳轮2053上自动缠绕起来,第二绳子2055的另一端将会在主动绳轮2052上逐渐绕出。同理地,第二驱动器2051还可驱动主动绳轮2052作反向转动,此时第二绳子2055的一端将会在主动绳轮2052上自动缠绕起来,第二绳子2055的另一端将会拉动从动绳轮2053作反向转动,于此同时,由于从动绳轮2053的正向转动,所以第一绳子2054的一端将会在从动绳轮2053上自动缠绕起来,第一绳子2054的另一端将会在主动绳轮2052上逐渐绕出。
67.请一并参阅图1和图5,当大腿202和连接臂201绕转动杆207的轴心相互转动时,转动杆207也会转动,此时同步绳轮2056也会跟着转动杆207作同步转动,而由于第一绳子2054和第二绳子2055都绕在同步绳轮2056上,所以当大腿202和连接臂201相互转动时,第一绳子2054和第二绳子2055都能够始终绕在同步绳轮2056上,第一绳子2054和第二绳子2055都不会与大腿202的内壁相互摩擦,相当于,第一绳子2054和第二绳子2055都不会与大腿202干涉,同时,此时还可避免第一绳子2054和第二绳子2055由于自身的跳动或受水流影
响而与其他部件卡死的问题,从而确保机器人在海里作业的稳定性和可靠性。
68.请一并参阅图1、图3和图4,本实施例的腿部模块20还包括摆动机构230,该摆动机构230连接机身10和连接臂201,并用于驱动连接臂201相对于机身10作摆动,此时可使每一根腿部模块20都具有更多的自由度,使机器人能够在海内更加灵活敏捷。
69.具体而言,摆动机构230主要包括基座2301、第三驱动器2302、传动机构2303和防尘罩2304。其中,传动机构2303又包括主动轮23031、从动轮23032、皮带23033、传动轴23034和张紧轮23035。具体的,基座2301和机身10固定为一体,第三驱动器2302固定在基座2301上,第三驱动器2302也优选为舵机,主动轮23031固定在第三驱动器2302的输出轴上,传动轴23034的两端通过轴套与基座2301相连接,即传动轴23034可相对于基座2301自由转动,而从动轮23032则套在传动轴23034的外壁上与传动轴23034固定连接,皮带23033套设在主动轮23031和从动轮23032上,张紧轮23035连接在基座2301上并用于张紧皮带23033,防尘罩2304盖合在基座2301上,防尘罩2304用于遮盖传动机构2303,确保传动机构2303可靠稳定地运转,避免海里杂物卡死传动机构2303。另外,传动轴23034的两端都固定在连接臂201上。摆动机构230在工作时,第三驱动器2302可带动主动轮23031旋转,主动轮23031通过皮带23033带动从动轮23032转动,从而带动传动轴23034转动,进而带动连接臂201相对于基座2301转动。
70.传动机构2303不限于本技术的带式传动,于其他实施例,传动机构2303也可以是齿轮传动机构或链轮传动机构。
71.请一并参阅图1、图3和图4,本实施例的的腿部模块20还包括蹼片210,该蹼片210固定在小腿203上,并且,位于小腿203朝向机身10的内侧。由于在各个腿部模块20内设置了蹼片210,因此当小腿203摆动时,可实现六足机器人在水中姿态的改变,增加机器人运动的灵活性,更加加强了化机器人对非结构化地面环境的适应能力。另外,小腿203的外壁也可以安装各类传感器,以及时地反馈水下环境信息,完成探测任务。
72.请一并参阅图1、图6和图7,以下对游泳动力模块30的结构设计进行详细地说明:
73.游泳动力模块30主要包括连接架301、曲柄302、连杆303、第四驱动器304、传动杆305及布置于传动杆305两侧的多个动力组件306。
74.具体的,连接架301又包括两个支架3011、多个连接板3012和一个安装板3013,其中,两个支架3011固定在机身10上,多个连接板3012固定在两个支架3011之间,安装板3013则固定在其中的两个连接板3012上。连接架301采用上述的结构设计,使连接架301更加紧凑合理,同时也便于加工和装配。
75.更具体的,第四驱动器304则固定在连接板3012上。第四驱动器304也优选为舵机。上述的曲柄302固定在第四驱动器304的输出轴上,第四驱动器304可带动曲柄302转动,而连杆303的一端则转动连接于曲柄302,连杆303的另一端转动连接于传动杆305,当曲柄302转动时,曲柄302可通过连杆303带动传动杆305向前方作伸缩运动。
76.进一步的,动力组件306又包括安装杆3061、安装架3062和蹼水片3063。其中,安装杆3061的一端转动连接于传动杆305,安装架3062固定在传动杆305上,蹼水片3063固定在安装架3062上,蹼水片3063用于通过拨水来带动机器人整体前进。另外,安装杆3061的中部设有贯穿自身的条形孔30611,连接架301上固定有多个限位轴3014,每一根限位轴3014都穿设在一个动力组件306的条形孔30611内并可沿条形孔30611的孔壁自由移动。由于限位
轴3014对安装杆3061进行了限制,使得当传动杆305作伸缩运动时,每个动力组件306的安装杆3061都能往复摆动,进而使蹼水片3063能够通过拨水来带动机器人前进。
77.本技术的游泳动力模块30具有结构简单和体积小型的优点,当游泳动力模块30搭配六足行走时,可以快速地完成各种动作需求,并且,当机器人需要快速运动时,可以为机器人提供足够的动力,同时提高机器人的响应能力。
78.以上仅为本发明的较佳实施例而已,仅具体描述了本发明的技术原理,这些描述只是为了解释本发明的原理,不能以任何方式解释为对本发明保护范围的限制。基于此处解释,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进,及本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其他具体实施方式,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。