1.本发明涉及智能网联汽车技术领域,具体为一种基于事件触发和状态估计的智能网联汽车编队控制方法。
背景技术:
2.车辆编队控制通过将多个车辆排列成指定的队形和结构,使编队中车辆之间保持较小且相对稳定的间距和相同的速度沿着道路前进。智能网联汽车组成编队是未来增加交通容量的一种经济高效的方法,有利于缓解交通拥堵、减少交通事故、减少环境污染。
3.利用车联网通信传递的信息,每辆车都可以获取编队中其他车辆的实时状态,在接收到这些信息后,编队内部车辆在计算分析后可以调整行驶状态,提前做好准备,避免意外的发生。
4.目前编队通信使用的时间触发策略即按照预先设定好采样时间对车辆状态进行采样并通信,消耗系统大量资源,并可能导致通信延迟、数据包丢失等问题。因此有必要设计合理的通信方式以利用有限的通信资源,事件触发策略就是其中一种有效的方式。事件触发策略并不是定期进行通信发送数据,而是根据测量误差与阈值的关系决定是否进行通信,这个阈值与所在系统参数有关。使用事件触发策略可以减少车辆之间的通信频率及能量消耗。
5.卡尔曼滤波器具有计算量小,实时性好的特点,并对运动状态具有较高的预测估计能力。由于传感器测量存在噪声,直接将噪声数据代入控制器会产生误差,影响控制效果,并且还会增加事件触发次数,因此对噪声数据进行卡尔曼滤波,可以在提高编队控制精度的同时减少触发次数,节约通信资源消耗。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本发明提供了一种基于事件触发的智能网联汽车编队控制方法,解决了编队内车辆通信频繁以及测量噪声影响车辆控制精度的问题。
8.(二)技术方案
9.本发明为了实现上述目的具体采用以下技术方案:一种基于事件触发的智能网联汽车编队控制方法,包括以下步骤:
10.步骤一:通过车联网通信和自车传感器测量接收前车及自车状态信息:
11.通过车联网通信接收前车加速度传递值通过自车传感器测量接收自车与前车间距x
i-1-x
i-l,自车与前车相对速度v
i-1-vi以及自车加速度ai。
12.步骤二:使用卡尔曼滤波器对测量的车辆状态信息进行估计:
13.在步骤二中,需要获取车辆所需状态信息的估计值,包括如下步骤:
14.1.选取状态变量及观测变量。
15.选取滤波系统状态变量x(k)为:
[0016][0017]
式中,x
i-1
(k)-xi(k)为自车与前车的相对距离,v
i-1
(k)-vi(k)为自车与前车的相对速度,xi(k)、vi(k)、ai(k)分别为自车的位置、速度,加速度。
[0018]
选取滤波系统观测变量y(k)为:
[0019]
y(k)=x(k)
[0020]
2.根据滤波系统状态变量及观测变量建立滤波系统离散状态方程:
[0021]
x(k 1)=ax(k) bu(k) ω(k)
[0022]
y(k)=cx(k) v(k)
[0023]
式中,式中,x(k 1)为滤波系统在k 1时刻的状态变量,u(k)为滤波系统的控制变量,a
i-1
(k)为第i-1辆车的实际加速度,ui(k)为自车的期望加速度,δt为采样时间,τ为车辆的动力迟滞系数,ω(k)和v(k)是过程噪声和观测噪声,均值均为零、方差分别为q和r的不相关的高斯白噪声。
[0024]
3.结合卡尔曼滤波算法对车辆的状态参数进行实时的滤波处理,滤波更新流程如下:
[0025]
由k-1时刻状态x(k-1|k-1)结合滤波系统方程估计k时刻状态x(k|k-1):
[0026]
x(k|k-1)=ax(k-1|k-1) bu(k)
[0027]
用k-1时刻的协方差矩阵p(k-1|k-1)和过程噪声协方差矩阵q更新k时刻的先验状态协方差矩阵p(k|k-1):
[0028]
p(k|k-1)=ap(k-1|k-1)a
t
q
[0029]
式中,a
t
为滤波系统状态转移矩阵a的转置。
[0030]
利用k时刻先验状态协方差矩阵p(k|k-1)和观测噪声协方差矩阵r计算k时刻卡尔曼增益k(k):
[0031][0032]
式中,c
t
为滤波系统观测矩阵c的转置。
[0033]
根据k时刻观测变量y(k)和k时刻卡尔曼增益k(k),得到k时刻最优状态估计x(k|k):
[0034]
x(k|k)=x(k|k-1) k(k)[y(k)-cx(k|k-1)]
[0035]
使用卡尔曼增益k(k)和先验状态协方差矩阵p(k|k-1)更新k时刻后验状态协方差
矩阵p(k|k):
[0036]
p(k|k)=[i-k(k)c]p(k|k-1)
[0037]
式中,i为单位矩阵。
[0038]
通过卡尔曼滤波可以对测量得到的状态参数进行估计,得到相关参数的估计值:分别为自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度
[0039]
步骤三:将获取及处理后的状态信息输入上层控制器:
[0040]
在步骤三中,需要建立上层控制器,得到车辆控制率,包括如下步骤:
[0041]
1.选择固定车头时距的安全距离算法。其安全距离如下所示:
[0042]di,s
=vith d
min
[0043]
式中,d
i,s
为安全距离,vi为车辆速度,th为车头时距,d
min
是最小安全距离。
[0044]
2.建立车辆编队状态方程式。将编队状态信息整理成状态方程形式如下:
[0045][0046]
式中,式中,us=ui,xs为控制系统状态变量,为xs的导数,us为控制系统控制变量,ws为控制系统干扰变量,τ为车辆的动力迟滞系数,th为设定的车头时距,x
i-1
,xi分别为第i-1辆车,第i辆车的位置,v
i-1
,vi分别为第i-1辆车,第i辆车的速度,a
i-1
,ai分别为第i-1辆车,第i辆车的实际加速度,u
i-1
,ui分别为第i-1辆车,第i辆车的期望加速度。
[0047]
3.将车辆编队状态信息输入上层控制器得到跟随控制率。
[0048]
由线性最优二次型(lqr)控制方法得到车辆跟随控制率:
[0049]
ui=k
x
(x
i-1-x
i-d
i,s-l) kv(v
i-1-vi) ka(a
i-1-ai)
[0050]
式中,k
x
,kv,ka分别为上层控制器参数。
[0051]
结合前车传递加速度自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度修正跟随控制律得:
[0052][0053]
步骤四:将期望加速度与实际车辆状态输入下层控制器修正节气门开度和制动压力:
[0054]
在步骤四中,需要接收期望加速度信息与车辆实际状态,通过下层控制器得到节气门开度及制动压力,包括如下步骤:
[0055]
1.接收期望加速度和实际节气门开度以及实际制动压力,分别从上层控制器和车载传感器获得。
[0056]
2.根据车辆逆动力学模型得到期望输入变量。
[0057]
由汽车传动系分析轮上转矩、发动机转速与汽车行驶速度之间的关系,可以计算
出发动机转矩。通过车载传感器可以获得车辆转速。节气门开度由发动机转速和发动机转矩共同决定,可以通过查表得到期望节气门开度。
[0058]
汽车在制动时,没有动力输入,当车轮没有到达抱死拖滑状况时,制动力与制动压力可视为线性关系,可以结合期望加速度与车辆运动状态计算出期望制动压力。
[0059]
3.将期望输入变量与实际输出变量输入下层控制器。
[0060]
由于实际输出变量与期望输入变量有所差距,通过模糊pid控制器对误差进行控制,包括以下步骤:
[0061]
(1)确定输入输出参数及模糊化。
[0062]
选取相邻两车之间的相对距离误差e和相对距离误差变化率ec作为模糊控制器的输入,k
p
、ki、kd三个参数作为模糊控制器的输出。将输入输出量描述为以下七个词汇,进行模糊化处理:
[0063]
{nb,nm,ns,zo,ps,pm,pb}
[0064]
(2)确定隶属度函数。
[0065]
隶属度函数一般有三角形函数,钟形函数,高斯型函数等。由于三角形函数运算量较小,结构简单,控制灵敏度也高,故采用三角形隶属度函数。
[0066]
(3)建立模糊控制规则。
[0067]
根据模糊控制理论,建立相关的模糊控制规则,通过模糊推理得到误差e和误差变化率ec与pid控制器三个参数k
p
,ki,kd的关系。
[0068]
(4)得到经过误差校正的输入变量。
[0069]
最终输入到车辆的节气门开度为:
[0070][0071]
式中,θ
in
为输入节气门开度,θ
des
为期望节气门开度,θ为实际节气门开度。
[0072]
最终输入到车辆的制动压力为:
[0073][0074]
式中,p
in
为输入制动压力,p
des
为期望制动压力,p为实际制动压力。
[0075]
步骤五:根据事件触发策略输出自车加速度传递值:
[0076]
在步骤五中,需要根据加速度误差判断是否更新加速度,并得到车辆加速度传递值,包括如下步骤:
[0077]
1.接收经过状态估计的自车加速度。
[0078]
2.计算当前加速度估计值与加速度传递值的误差。
[0079][0080]
式中,δi(t)为传递误差,为加速度传递值,为加速度估计值。
[0081]
3.计算事件触发动态阈值。
[0082]
定义事件触发阈值σ为:
[0083]
[0084]
式中,γ、ε为触发阈值的相关参数,为第i辆车第n次触发的时间序列,ζ为采样周期,为第n次触发后更新的加速度。
[0085]
4.判断是否达到触发条件。
[0086]
若成立,则认为达到触发阈值;若成立,则认为达到触发阈值;若成立,则认为未达到触发阈值。式中,为未被触发的采样周期数目。
[0087]
5.根据触发情况进行状态更新。
[0088]
若达到触发条件,则更新自车加速度传递值。
[0089][0090][0091]
式中,为第i辆车第n 1次触发的时间序列,为第n 1次触发后更新的加速度,为未被触发的采样周期数目。
[0092]
若未达到触发条件,则通过零阶保持器达到不更新加速度传递值的效果。
[0093][0094]
式中,为第i辆车加速度传递值。
[0095]
(三)有益效果
[0096]
与现有技术相比,本发明提供了一种基于事件触发和状态估计的智能网联汽车编队控制方法。具备以下有益效果:
[0097]
1.引入卡尔曼滤波对自车传感器接收信息进行状态估计,提高了跟随精度,降低跟随误差;可减少触发次数,增加内触发时间。
[0098]
2.利用事件触发策略减少了车辆之间的通信频率与能量消耗,延长系统的使用寿命,增加了编队系统的经济效益。
[0099]
3.采用线性最优二次型(lqr)设计跟随控制律,设计模糊pid控制器减小了跟随误差,实现了编队的控制目标,保障了跟随车的安全。
附图说明
[0100]
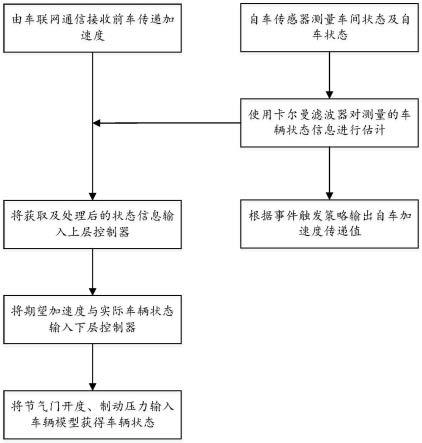
图1为本发明所述基于事件触发的智能网联汽车编队控制方法流程图;
[0101]
图2为本发明下层控制器示意图;
[0102]
图3为本发明事件触发策略流程图。
具体实施方式
[0103]
如图1所示,本发明一个实施例提出的一种基于事件触发和状态估计的智能网联汽车编队控制方法,包括以下步骤:
[0104]
步骤一:通过车联网通信和自车传感器测量接收前车及自车状态信息:
[0105]
通过车联网通信接收前车加速度传递值通过自车传感器测量接收自车与前车间距x
i-1-x
i-l,自车与前车相对速度v
i-1-vi以及自车加速度ai。
[0106]
步骤二:使用卡尔曼滤波器对测量的车辆状态信息进行估计:
[0107]
在步骤二中,需要获取车辆所需状态信息的估计值,包括如下步骤:
[0108]
1.选取状态变量及观测变量。
[0109]
选取滤波系统状态变量x(k)为:
[0110][0111]
式中,x
i-1
(k)-xi(k)为自车与前车的相对距离,v
i-1
(k)-vi(k)为自车与前车的相对速度,xi(k)、vi(k)、ai(k)分别为自车的位置、速度,加速度。
[0112]
选取滤波系统观测变量y(k)为:
[0113]
y(k)=x(k)
[0114]
2.根据滤波系统状态变量及观测变量建立滤波系统离散状态方程:
[0115]
x(k 1)=ax(k) bu(k) ω(k)
[0116]
y(k)=cx(k) v(k)
[0117]
式中,式中,x(k 1)为滤波系统在k 1时刻的状态变量,u(k)为滤波系统的控制变量,a
i-1
(k)为第i-1辆车的实际加速度,ui(k)为自车的期望加速度,δt为采样时间,τ为车辆的动力迟滞系数,ω(k)和v(k)是过程噪声和观测噪声,均值均为零、方差分别为q和r的不相关的高斯白噪声。
[0118]
3.结合卡尔曼滤波算法对车辆的状态参数进行实时的滤波处理,滤波更新流程如下:
[0119]
由k-1时刻状态x(k-1|k-1)结合滤波系统方程估计k时刻状态x(k|k-1):
[0120]
x(k|k-1)=ax(k-1|k-1) bu(k)
[0121]
用k-1时刻的协方差矩阵p(k-1|k-1)和过程噪声协方差矩阵q更新k时刻的先验状态协方差矩阵p(k|k-1):
[0122]
p(k|k-1)=ap(k-1|k-1)a
t
q
[0123]
式中,a
t
为滤波系统状态转移矩阵a的转置。
[0124]
利用k时刻先验状态协方差矩阵p(k|k-1)和观测噪声协方差矩阵r计算k时刻卡尔曼增益k(k):
[0125][0126]
式中,c
t
为滤波系统观测矩阵c的转置。
[0127]
根据k时刻观测变量y(k)和k时刻卡尔曼增益k(k),得到k时刻最优状态估计x(k|k):
[0128]
x(k|k)=x(k|k-1) k(k)[y(k)-cx(k|k-1)]
[0129]
使用卡尔曼增益k(k)和先验状态协方差矩阵p(k|k-1)更新k时刻后验状态协方差矩阵p(k|k):
[0130]
p(k|k)=[i-k(k)c]p(k|k-1)
[0131]
式中,i为单位矩阵。
[0132]
通过卡尔曼滤波可以对测量得到的状态参数进行估计,得到相关参数的估计值:分别为自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度
[0133]
步骤三:将获取及处理后的状态信息输入上层控制器:
[0134]
在步骤三中,需要建立上层控制器,得到车辆控制率,包括如下步骤:
[0135]
1.选择固定车头时距的安全距离算法。其安全距离如下所示:
[0136]di,s
=vith d
min
[0137]
式中,d
i,s
为安全距离,vi为车辆速度,th为车头时距,d
min
是最小安全距离。
[0138]
2.建立车辆编队状态方程式。将编队状态信息整理成状态方程形式如下:
[0139][0140]
式中,式中,us=ui,xs为控制系统状态变量,为xs的导数,us为控制系统控制变量,ws为控制系统干扰变量,τ为车辆的动力迟滞系数,th为设定的车头时距,x
i-1
,xi分别为第i-1辆车,第i辆车的位置,v
i-1
,vi分别为第i-1辆车,第i辆车的速度,a
i-1
,ai分别为第i-1辆车,第i辆车的实际加速度,u
i-1
,ui分别为第i-1辆车,第i辆车的期望加速度。
[0141]
3.将车辆编队状态信息输入上层控制器得到跟随控制率。
[0142]
由线性最优二次型(lqr)控制方法得到车辆跟随控制率:
[0143]
ui=k
x
(x
i-1-x
i-d
i,s-l) kv(v
i-1-vi) ka(a
i-1-ai)
[0144]
式中,k
x
,kv,ka分别为上层控制器参数。
[0145]
结合前车传递加速度自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度修正跟随控制律得:
[0146][0147]
步骤四:将期望加速度与实际车辆状态输入下层控制器修正节气门开度和制动压力:
[0148]
如图2所示,步骤四包括接收期望加速度信息与车辆实际状态,通过下层控制器得到节气门开度及制动压力。
[0149]
1.接收期望加速度和实际节气门开度以及实际制动压力,分别从上层控制器和车载传感器获得。
[0150]
2.根据车辆逆动力学模型得到期望输入变量。
[0151]
由汽车传动系分析轮上转矩、发动机转速与汽车行驶速度之间的关系,可以计算出发动机转矩。通过车载传感器可以获得车辆转速。节气门开度由发动机转速和发动机转矩共同决定,可以通过查表得到期望节气门开度。
[0152]
汽车在制动时,没有动力输入,当车轮没有到达抱死拖滑状况时,制动力与制动压力可视为线性关系,可以结合期望加速度与车辆运动状态计算出期望制动压力。
[0153]
3.将期望输入变量与实际输出变量输入下层控制器。
[0154]
由于实际输出变量与期望输入变量有所差距,通过模糊pid控制器对误差进行控制,包括以下步骤:
[0155]
(1)确定输入输出参数及模糊化。
[0156]
选取相邻两车之间的相对距离误差e和相对距离误差变化率ec作为模糊控制器的输入,k
p
、ki、kd三个参数作为模糊控制器的输出。将输入输出量描述为以下七个词汇,进行模糊化处理:
[0157]
{nb,nm,ns,zo,ps,pm,pb}
[0158]
(2)确定隶属度函数。
[0159]
隶属度函数一般有三角形函数,钟形函数,高斯型函数等。由于三角形函数运算量较小,结构简单,控制灵敏度也高,故采用三角形隶属度函数。
[0160]
(3)建立模糊控制规则。
[0161]
根据模糊控制理论,建立相关的模糊控制规则,通过模糊推理得到误差e和误差变化率ec与pid控制器三个参数k
p
,ki,kd的关系。
[0162]
(4)得到经过误差校正的输入变量。
[0163]
最终输入到车辆的节气门开度为:
[0164][0165]
式中,θ
in
为输入节气门开度,θ
des
为期望节气门开度,θ为实际节气门开度。
[0166]
最终输入到车辆的制动压力为:
[0167][0168]
式中,p
in
为输入制动压力,p
des
为期望制动压力,p为实际制动压力。
[0169]
步骤五:根据事件触发策略输出自车加速度传递值:
[0170]
如图3所示,步骤五需要根据加速度误差判断是否更新加速度,并得到车辆加速度传递值,包括如下步骤:
[0171]
1.接收经过状态估计的自车加速度。
[0172]
2.计算当前加速度估计值与加速度传递值的误差。
[0173][0174]
式中,δi(t)为传递误差,为加速度传递值,为加速度估计值。
[0175]
3.计算事件触发动态阈值。
[0176]
定义事件触发阈值σ为:
[0177][0178]
式中,γ、ε为触发阈值的相关参数,为第i辆车第n次触发的时间序列,ζ为采样周期,为第n次触发后更新的加速度。
[0179]
4.判断是否达到触发条件。
[0180]
若成立,则认为达到触发阈值;若成立,则认为达到触发阈值;若成立,则认为未达到触发阈值。式中,为未被触发的采样周期数目。
[0181]
5.根据触发情况进行状态更新。
[0182]
若达到触发条件,则更新自车加速度传递值。
[0183][0184][0185]
式中,为第i辆车第n 1次触发的时间序列,为第n 1次触发后更新的加速度,为未被触发的采样周期数目。
[0186]
若未达到触发条件,则通过零阶保持器达到不更新加速度传递值的效果。
[0187][0188]
式中,为第i辆车加速度传递值。
[0189]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。