技术特征:
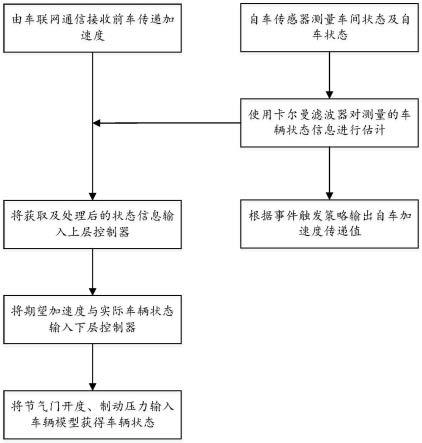
1.一种基于事件触发的智能网联汽车编队控制方法,其特征在于,包括以下步骤:步骤一:通过车联网通信和自车传感器测量接收前车及自车状态信息;步骤二:使用卡尔曼滤波器对测量的车辆状态信息进行估计;步骤三:将获取及处理后的状态信息输入上层控制器;步骤四:将期望加速度与实际车辆状态输入下层控制器修正节气门开度和制动压力;步骤五:根据事件触发策略输出自车加速度传递值。2.根据权利要求1所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:步骤一中所述通过车联网通信和自车传感器测量接收前车及自车状态信息,具体内容如下:通过车联网通信接收前车加速度传递值通过自车传感器测量接收自车与前车间距x
i-1-x
i-l,自车与前车相对速度v
i-1-v
i
以及自车加速度a
i
。3.根据权利要求2所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:步骤二中所述使用卡尔曼滤波器对测量的车辆状态信息进行估计,包括如下内容:选取状态变量及观测变量选取滤波系统状态变量x(k)为:式中,x
i-1
(k)-x
i
(k)为自车与前车的相对距离,v
i-1
(k)-v
i
(k)为自车与前车的相对速度,x
i
(k)、v
i
(k)、a
i
(k)分别为自车的位置、速度,加速度;选取滤波系统观测变量y(k)为:y(k)=x(k)根据滤波系统状态变量及观测变量建立滤波系统离散状态方程:x(k 1)=ax(k) bu(k) ω(k)y(k)=cx(k) v(k)式中,式中,x(k 1)为滤波系统在k 1时刻的状态变量,u(k)为滤波系统的控制变量,a
i-1
(k)为第i-1辆车的实际加速度,u
i
(k)为自车的期望加速度,δt为采样时间,τ为车辆的动力迟滞系数,ω(k)和v(k)是过程噪声和观测噪声,均值均为零、方差分别为q和r的不相关的高斯白噪声;
结合卡尔曼滤波算法对车辆的状态参数进行实时的滤波处理。4.根据权利要求3所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:所述结合卡尔曼滤波算法对车辆的状态参数进行实时的滤波处理,滤波更新流程如下:由k-1时刻状态x(k-1|k-1)结合滤波系统方程估计k时刻状态x(k|k-1):x(k|k-1)=ax(k-1|k-1) bu(k)用k-1时刻的协方差矩阵p(k-1|k-1)和过程噪声协方差矩阵q更新k时刻的先验状态协方差矩阵p(k|k-1):p(k|k-1)=ap(k-1|k-1)a
t
q式中,a
t
为滤波系统状态转移矩阵a的转置;利用k时刻先验状态协方差矩阵p(k|k-1)和观测噪声协方差矩阵r计算k时刻卡尔曼增益k(k):式中,c
t
为滤波系统观测矩阵c的转置;根据k时刻观测变量y(k)和k时刻卡尔曼增益k(k),得到k时刻最优状态估计x(k|k):x(k|k)=x(k|k-1) k(k)[y(k)-cx(k|k-1)]使用卡尔曼增益k(k)和先验状态协方差矩阵p(k|k-1)更新k时刻后验状态协方差矩阵p(k|k):p(k|k)=[i-k(k)c]p(k|k-1)式中,i为单位矩阵;通过卡尔曼滤波对测量得到的状态参数进行估计,得到相关参数的估计值:分别为自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度5.根据权利要求4所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:步骤三中所述将获取及处理后的状态信息输入上层控制器,包括如下内容:选择固定车头时距的安全距离算法;安全距离如下所示:d
i,s
=v
i
t
h
d
min
式中,d
i,s
为安全距离,v
i
为车辆速度,t
h
为车头时距,d
min
是最小安全距离;建立车辆编队状态方程式;将编队状态信息整理成状态方程形式如下:式中,式中,u
s
=u
i
,x
s
为控制系统状态变量,为x
s
的导数,u
s
为控制系统控制变量,w
s
为控制系统干扰变量,τ为车辆的动力迟滞系数,t
h
为设定的车头时距,x
i-1
,x
i
分别为第i-1辆车,第i辆车的位置,v
i-1
,v
i
分别为第i-1辆车,第i辆车的速度,a
i-1
,a
i
分别为第i-1辆车,第i辆车的实际加速度,u
i-1
,u
i
分别为第i-1辆车,第i辆车的期望加速度;将车辆编队状态信息输入上层控制器得到跟随控制率。6.根据权利要求5所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于,所述将车辆编队状态信息输入上层控制器得到跟随控制率,具体内容如下:由线性最优二次型(lqr)控制方法得到车辆跟随控制率:u
i
=k
x
(x
i-1-x
i-d
i,s-l) k
v
(v
i-1-v
i
) k
a
(a
i-1-a
i
)式中,k
x
,k
v
,k
a
分别为上层控制器参数;结合前车传递加速度自车与前车估计相对距离自车与前车估计相对速度以及自车估计加速度修正跟随控制律得:7.根据权利要求6所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:步骤四中所述将期望加速度与实际车辆状态输入下层控制器修正节气门开度和制动压力,包括如下内容:接收期望加速度和实际节气门开度以及实际制动压力,分别从上层控制器和车载传感器获得;根据车辆逆动力学模型得到期望输入变量;由汽车传动系分析轮上转矩、发动机转速与汽车行驶速度之间的关系,计算出发动机转矩;通过车载传感器获得车辆转速;节气门开度由发动机转速和发动机转矩共同决定,通过查表得到期望节气门开度;汽车在制动时,没有动力输入,当车轮没有到达抱死拖滑状况时,制动力与制动压力视为线性关系,结合期望加速度与车辆运动状态计算出期望制动压力;将期望输入变量与实际输出变量输入下层控制器。8.根据权利要求7所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:所述将期望输入变量与实际输出变量输入下层控制器,包括以下内容:(1)确定输入输出参数及模糊化;选取相邻两车之间的相对距离误差e和相对距离误差变化率ec作为模糊控制器的输入,k
p
、k
i
、k
d
三个参数作为模糊控制器的输出;将输入输出量描述为以下七个词汇,进行模糊化处理:{nb,nm,ns,zo,ps,pm,pb}(2)确定隶属度函数;采用三角形隶属度函数;(3)建立模糊控制规则;根据模糊控制理论,建立相关的模糊控制规则,通过模糊推理得到误差e和误差变化率
ec与pid控制器三个参数k
p
,k
i
,k
d
的关系;(4)得到经过误差校正的输入变量;最终输入到车辆的节气门开度为:式中,θ
in
为输入节气门开度,θ
des
为期望节气门开度,θ为实际节气门开度;最终输入到车辆的制动压力为:式中,p
in
为输入制动压力,p
des
为期望制动压力,p为实际制动压力。9.根据权利要求8所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:步骤五中所述根据事件触发策略输出自车加速度传递值,包括如下内容:接收经过状态估计的自车加速度;计算当前加速度估计值与加速度传递值的误差;式中,δ
i
(t)为传递误差,为加速度传递值,为加速度估计值;计算事件触发动态阈值;定义事件触发阈值σ为:式中,γ、ε为触发阈值的相关参数,为第i辆车第n次触发的时间序列,ζ为采样周期,为第n次触发后更新的加速度;判断是否达到触发条件;根据触发情况进行状态更新。10.根据权利要求9所述的一种基于事件触发的智能网联汽车编队控制方法,其特征在于:判断是否达到触发条件,具体内容如下:若成立,则认为达到触发阈值;若成立,则认为达到触发阈值;若成立,则认为未达到触发阈值;式中,为未被触发的采样周期数目;根据触发情况进行状态更新,具体内容如下:若达到触发条件,则更新自车加速度传递值若达到触发条件,则更新自车加速度传递值式中,为第i辆车第n 1次触发的时间序列,为第n 1次触发后更新的加速度,为未被触发的采样周期数目;
若未达到触发条件,则通过零阶保持器达到不更新加速度传递值的效果;式中,为第i辆车加速度传递值。
技术总结
本发明属于智能网联汽车技术领域,尤其为一种基于事件触发的智能网联汽车编队控制方法,包括:通过车联网通信和自车传感器测量接收前车及自车状态信息;使用卡尔曼滤波器对测量的车辆状态信息进行估计;将获取及处理后的状态信息输入上层控制器;将期望加速度与实际车辆状态输入下层控制器修正节气门开度和制动压力;根据事件触发策略输出自车加速度传递值。本发明利用事件触发策略减少了车辆之间的通信频率与能量消耗,引入卡尔曼滤波对自车传感器接收信息进行状态估计,提高了跟随精度,降低跟随误差,增加内触发时间;采用线性最优二次型(LQR)设计跟随控制律,实现了编队的控制目标,保障了跟随车的安全。保障了跟随车的安全。保障了跟随车的安全。
技术研发人员:胡宏宇 王子轩 程铭 孙亮亮 李争一
受保护的技术使用者:吉林大学
技术研发日:2022.05.06
技术公布日:2022/7/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。